КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Третье началоКТД известно как теорема Нернста [77,78], следствием которой является так называемый принцип недостижимости нуля абсолютной температуры. 5 страница
|
|
|
|
Допустим, что Земля представляет собой сплошной шар и гравиполе вглубь ее изменяется по инварианту R2g – const. Предположим, вслед за Мюпертюи, Вольтером, Перельманом, что от полюса до полюса в ней прорыт сквозной колодец. К одной из стенок его пристроена шахта лифта, на котором мы опускаемся с телом до отметки, где радиус тела будет равен r'' = 18,4 см. Если теперь тело бросить в колодец, то оно не будет падать к центру, а зависнет в невесомости в колодце на этом уровне. Если же бросить несколько различных тел, то каждое из них зависнет на различных уровнях и между ними окажется некоторое нейтральное свободное пространство.
Если их попробовать сдвинуть вместе, они будут отталкиваться друг от друга. Именно это свойство обусловливает образование колец вокруг планет (например, у Сатурна).
Определим, на каком расстоянии от центра R' (на какой отметке) радиус тела достигнет 18,4 см. Используя зависимость
r/R = r'/R',
находим:
R' = r'R/r = 4,834·108 см.
По инварианту Rm2 = 1,769·1014 определим, чему равна масса тела на отметке R':
R'm2 = 1,769·1014,
т' = 6,05·102 г.
По инварианту R2g = 3,991·1020 находим напряженность гравиполя Земли g' на отметке R':
R2g' = 3,99·1020,
g' = 1,708·103.
Следовательно, и напряженность внешнего гравиполя g', и масса m' на отметке R' оказываются равными по абсолютной величине напряженности g и массе т, полученным при переходе тела к движению по инерции с первой космической скоростью. Поскольку тело на отметке находится в статическом состоянии, то можно ожидать, что вес тела будет обусловливаться силой F' в два раза большей, чем на поверхности Земли. Определим эту силу:
F' = m'g' = 1,033·106 см/с2.
Аналогичную величину F/ получаем при переходе к орбитальной скорости
|
|
|
F' = F + F' = 1,033·106 см/с2.
Однако сила F' не является весом в буквальном понимании, поскольку тело на отметке не будет давить на поверхность. Она есть та сила, которая сжимает тело и обеспечивает его невесомость в данном месте. Таким образом, деформация, вызываемая опусканием тела на глубину 1,550·108 см внутрь Земли, и деформация как результат перехода тела к движению по инерции с первой космической скоростью есть следствие одного и того же явления — изменение взаимодействия с напряженностью внешнего гравиполя. Следовательно, инерция и гравитация есть один и тот же физический процесс, проявляющийся по-разному при различных формах взаимодействия тел с внешним гравитационным полем.
И снова мы приходим к выводу, что не масса, как это следует по Ньютону, выступает мерой сопротивления изменению движения и инертности тела, а сопротивление тела деформации, вызываемой внешним гравитационным полем либо при переносе тела по высоте, либо при его движении в любом направлении.
Если, как полагают по механике Ньютона, с поверхности Земли столкнуть в колодец какое-то тело, то оно, падая к центру с постоянным ускорением, на большой скорости минует его и устремится с замедлением к другому выходу. Достигнув его и на мгновение остановившись, оно снова устремится к центру и будет качаться туда и обратно вечно. В покое тело может находиться только в центре Земли.
Русская механика предсказывает, что тело, падая с поверхности в колодец, сначала движется с ускорением, которое постепенно, под действием нарастающей деформации, замедляется. И, наконец, когда энергия внутреннего сопротивления сжатию превзойдет силу воздействия внешнего гравиполя, тело настолько затормозится, что задолго до центра, после некоторого периода колебаний, зависнет на том уровне, на котором внутреннее сопротивление уравновешивает сжимающее напряжение внешнего гравиполя. Это явление можно назвать инерционным зависанием, а уровень зависания — нейтральной зоной гравитационного взаимодействия поля тела и Земли.
|
|
|
Если тело на лифте опустить ниже нейтрального уровня и там отпустить, то оно вместо падения к центру устремится вверх от центра к своей нейтральной зоне. Именно эта картина движения предметов, вызываемая теми же причинами, наблюдается в «таинственной точке» города Санта-Круст (штат Калифорния, США) [25]. Отмечу также, что именно это явление — инерционное зависание тел в гравитационном поле — обусловливает возникновение хвостов у комет при движении их из зоны слабой напряженности гравитационного поля в зону сильной напряженности в окрестностях Солнца. Это явление — образование кометных хвостов — может оказаться существенным для расчета масс комет в различных областях околосолнечного пространства.
Когда движущееся равномерно тело тормозится внешними силами, происходит процесс раздеформации, связанный с рассасыванием эфирной шубы, с выделением накопленной энергии, с изменением условий взаимодействия тела с эфиром. Всякое сопротивление процессу раздеформации сопровождается ускорением раздеформации и усилением воздействия тела на предмет, вызывающий сопротивление. Если же раздеформация идет со слабым сопротивлением, например вращение ротора в подшипниках, то она может продолжаться до тех пор, пока энергия, накопленная деформированным ротором, полностью не иссякнет, ротор не возвратится к тем параметрам, при которых его свойства окажутся сбалансированными со свойствами окружающей среды. Особенно долог процесс раздеформации тел, запущенных в космос на высокую орбиту. Он протекает годами, десятилетиями и долее. Но всегда все искусственные тела обязательно пройдут процесс раздеформации и упадут на те тела, вокруг которых они вращались.
Всякая инертность проявляется деформацией в той области пространства, в которой движется тело и с которой оно взаимодействует. Представление об инерции как о движении без взаимодействия, происходящем относительно неподвижной системы отсчета, не соответствует реальным процессам природы.
3.7. Вращательное движение тел
|
|
|
в гравитационном поле
Логически замкнутая система постулатов, заложенная в основания механики Ньютона, обеспечивала возможность рассмотрения взаимодействия тел в основном как движения геометрических точек, наделенных свойством массы. Она не допускала выхода за рамки очерченного круга и не способствовала предложению экспериментов, противоречащих постулатам. И только в одном случае запрет нарушался. Таким нарушением было признание инерции особым свойством, способностью тела сопротивляться изменению своего положения. А во вращательном движении признавались аналоги инерции — центробежные силы, которые возникают как бы из ничего и приводят к тому, что тело или часть тела стремится удалиться от оси вращения. В обоих случаях подспудно подразумевалась какая-то форма неясного взаимодействия с какими-то вещественными носителями, обусловливающими как сопротивление изменению своего состояния, так и появление растягивающих усилий при вращении.
Однако возникновение центробежной силы, по-видимому, математически найти не удалось. Возможно, такая задача и не ставилась, поскольку не было представления о физической сущности центробежных сил, а используемый математический аппарат не предлагал способов их получения. Для точки, движущейся по кривой, без взаимодействия, математически выводилось два ускорения:
одно — центростремительное — нормальное, направленное по радиусу к оси,
второе — касательное — тангенциальное, которое и становилось источником сил.
Центробежное ускорение нарушало замкнутость системы механических постулатов, выходило за пределы точечного представления движения, требовало физического и математического обоснования вызываемых вращением центробежных сил. А таковые обоснования отсутствовали. Более того, их отсутствие легко обосновывалось математически. Приведу стандартный пример такого обоснования сил, появляющихся при движении точки по окружности со скоростью v и соответствующим ускорением а в прямоугольной системе координат. Поскольку движется точка, то ускорением для нее является скорость изменения скорости. При заданном радиусе-векторе движение геометрической точки относительно системы отсчета сводится к исследованию вектора-функции r (t). Для определения движения точки надо задать ее положение относительно системы координат в момент времени t, т.е. задать вектор-функцию r (t). Тогда первая производная v (t) = dr (t) /dt является скоростью точки, а вторая производная
|
|
|
d (t) = dv (t) /dt = d2r (t)/ dt2,
ее ускорением.
|
Рис. 39
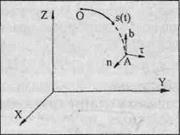
Если в пространстве X, Y,Z задается траектория движения точки, на которой отмечается начало, направление движения и скалярная функция S (t), длины дуги траектории от начала отсчета до движущейся в момент t точки, то при движении в одном направлении величина функции совпадает с путем, пройденным по траектории (рис.39).
Используем сопровождающий трехгранник из орт τ, п и b касательной, главной нормали и бинормали в точке А траектории (см. рис 39). Поскольку орты есть вектор функции τ = τ (t); п = n (t); b = b (t),то их направление меняется при движении точки А. Определим ориентацию вектора скорости v (t) и ускорение a(t) относительно осей сопровождающего трехгранника:
v (t) = dr (t) /dt = dr(t)·ds/dS·dt.
Так как dr/dS = τ,
то:
v(t) = τdS/dt, (3.74)
вектор скорости равен по абсолютной величине модулю производной ds/dt и направлен по касательной к траектории.
То же для ускорения:
a (t) – dv/dt = d [ dS /(dt) ·τ (t)] /dt = = τd2S/dt2 + v2dτ/dS.
Поскольку dτ/ds вектор кривизны, равный п/r и направленный по главной нормали (где r – радиус кривизны), то:
a(t) = τd2S/dt2 + v2n/r. (3.75)
Следовательно, вектор а соприкасается с плоскостью сопровождающего трехгранника и имеет проекцию на касательное направление:
at = d2S/dt2 = dv/dt = εr, (3.76)
где ε – угловое ускорение, at – касательное (тангенциальное) ускорение а проекции на направление главной нормали:
ап = v2/r, (3.77)
оно является нормальным ускорением, всегда направленным к центру кривизны траектории. Следовательно:
а = √ (аt2 + an2). (3.78)
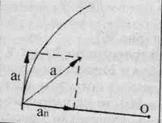
Отсюда вытекает, что при движении по окружности касательное ускорение направлено перпендикулярно радиусу окружности, а нормальное — по радиусу к центру. Полное ускорение а постоянно по величине и также направлено внутрь окружности (рис. 40).
|
Это вполне корректное математическое определение ско-рости, нормального и тангенциального ускорения может быть подтверждено многими физическими примерами. Так, ускорение свободного падения на поверхности Земли и других небесных Рис. 40. тел направлено по радиусу к центру, планеты и их спутники удерживаются силой, составляющей которой, является ускорение, тоже направленное к центру (?) либо Солнца, либо планет. Вращение тела на тонкой нерастяжимой нити имеет в соответствии с механикой ускорение, направленное к месту крепления нити. Однако это предположение вызывает серьезные сомнения в своей достоверности, а потому рассмотрим некоторые эксперименты, как бы его подтверждающие.
Процесс возникновения силы Fn, являющейся произведением массы точки т на ускорение ап:
Fn = man,
получает, согласно механике, объяснение в следующем описании.
|
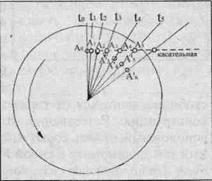
Возьмем расположенный горизонтально диск (рис. 41) и положим на него, в некотором отдалении от центра, шарик А. Начнем раскручивать диск. Поскольку шарик лежит на вращающемся диске, он вместе с диском начнет поворачиваться по направле-нию вращения. Однако возни-кающая инерция будет стре-
Рис.41
миться удержать его в том положении, которое он занимал в момент времени t° и обусловливать ему в процессе вращении сдвиг по касательной к радиусу первоначального положения. Поэтому в каждый последующий момент t', t", t'",... положение шарика на касательной А', А", А"',... будет все дальше и дальше отстоять от центра круга. Шарик как бы скользит вдоль радиуса, оставаясь на касательной.
Если теперь шарик закрепить невесомой нитью к центру О и начать вращать диск, то нить будет «притягивать» шарик А°, А°°, А°°°, не давая ему возможности отодвигаться по касательной. Сила Fn, возникающая при натяжении, будет внутренней силой, действующей по направлению нормального ускорения ап. Перпендикулярно ей продолжает действовать тангенциальная сила Ft, что соответствует математическому выводу двух ускорений ап и at, представлению о движении тела по инерции и отвергает возможность существования центробежной силы. Именно этим способом объясняется свободное вращение тела на невесомой нити. В книге Роджерса [67] приводится более 20 экспериментов, как бы подтверждающих существование только центростремительной силы, и ни одного, подтверждающего центробежную, поскольку автор их отвергает. Однако такие эксперименты есть. Приведу для примера пару из них:
|
Рис. 42.
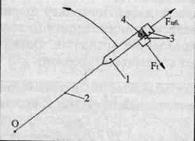
Возьмем цилиндр 1(рис. 42) и с помощью невесомой нити 2 закрепим один его конец за центр О, а на другом конце поставим два пружинных динамометра 3один в торец, а другой — со стороны, противоположной направлению вращения. Внутри цилиндра поместим шарик 4, способный свободно двигаться от торца к торцу. И раскрутим эту конструкцию. Естественно, что шарик упрется в противоположный от оси торец, и будет давить на укрепленный там динамометр с силой F. Динамометр и зафиксирует центробежную силу, направленную от оси. Другой динамометр зафиксирует тангенциальную силу F'. Причем: F = F'.
Однако можно сказать, что сам торец выполняет роль нити. Объяснение то же, что и для рис. 41. Чтобы доказать обратное, заменим трубу кожухом (рис. 43), напоминающим закрытую тарелку 1. Вместо нити поставим жесткий стержень
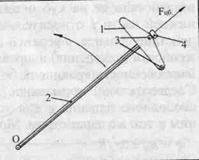
Рис. 43
2, дабы исключить болтанку кожуха, что, впрочем, не меняет сути опыта. В кожух поместим шарик 3так, чтобы он мог свободно передвигаться в любом направлении, и динамометр 4. Раскрутим эту конструкцию и обнаружим, что при некоторой скорости шарик от кромки тарелки переместится к дну О', а динамометр зафиксирует центробежную силу, направленную от оси и равную F. Но сила, соответствующая тангенциальному ускорению F' проявлять себя не будет. Как явствует из рис. 43, шарику для попадания в точку О' придется двигаться навстречу тому движению, которое обеспечивает первая касательная, и занять положение, в котором вторая касательная образует очень малый угол с первой.
Объяснить этот эксперимент существованием только центростремительной силы невозможно. Поэтому подробнее рассмотрим физический механизм вращательного движения тел и сопоставим с действием, которое оказывает на неподвижное тело (например, куб) напряженность внешнего гравитационного поля (рис. 44).
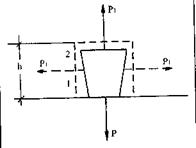
Рис. 44.
На куб, лежащий на поверхности Земли, объемно действует сжимающая сила Р, равная произведению массы тела т на напряженность внешнего гравиполя(ускорение свободного падения) Р = mg, фиксируемая как вес.
Точно такая же сила сопротивления Р' действует по всем направлениям от тела: Р = Р'. Однако симметричность по вертикали такого воздействия оставляет тело неподвижным относительно поверхности. А так как напряженность гравиполя по высоте h изменяется, то и воздействие ее на куб оказывается асимметричным. В нижней части 1 относительно средней оси РР' это воздействие сильнее, в верхней 2 — слабее. И вектор напряженности (ускорения) направлен в ту сторону, в которой напряженность гравиполя больше, т.е. к центру Земли. Следовательно, нормальное ускорение аn и ускорение свободного падения g для условий Земли является одним и тем же параметром. Можно записать:
g = ап = v2/R. (3.79)
Уравнение (3.79) легко проверить, подставив в него величину первой орбитальной скорости v и радиуса Земли R. Поскольку v = Rω, то, заменив в (3.79) числитель значением R2ω2, получим:
g = ап = Rω2, (3.80)
g = an = vω.. (3.81)
Физический смысл этих формул в том, что всякое ускорение есть в первую очередь процесс изменения напряженности гравиполя, вызванный взаимодействием движущегося тела с вещественным пространством. Изменение напряженности, которое мы фиксируем извне и изучаем в виде ускорения, обусловливает все процессы взаимодействия, возникает всегда, при любых изменениях скорости при прямолинейном или криволинейном движении, но вектор этого ускорения зависит от условий деформации тела.
Рассмотрим характер взаимодействия тела, вращающегося на тонкой невесомой и нерастяжимой нити (рис. 45), с внешним вещественным пространством, деформацию вращающегося тела и изменение напряженности (ускорения) по высоте тела А, считая высоту от точки закрепления нити. Система асимметрична оси вращения, и эта асимметрия будет проявляться во взаимодействии с эфиром.
|
Рис. 45.
На нити длиной R закреплено кубическое тело А с размером стороны h, вращающееся против часовой стрелки со скоростью v. В этом вращении каждая точка тела по длине от центра закрепления движется с одинаковой угловой, но с разными линейными скоростями. Это означает, что при одной и той же угловой скорости каждая точка К, L, М,... и т.д. будет иметь свое ускорение (а следовательно, и свою напряженность), отличную от ускорения соседних точек. Причем точки, расположенные ближе к месту закрепления, будут иметь меньшее ускорение, а дальше от него — большее ускорение:
аК = vК2/RК; aL = vL 2/ RL; aМ = vM2/RM;...; aS = vS2/RS;
an = S(aК + aL + аМ +...+ aS) /S = v2/R,
где S - количество точек по длине тела; aК < aL < aМ < … < aS.
Ускорение, полученное по любой формуле для вращающегося по окружности тела, имеет одинаковую по модулю величину, как для главного нормального ускорения, так и для ускорения тангенциального, т.е. при круговом вращении | а |= | at |.
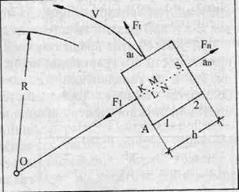
А поскольку при вращении свойство ускорение есть не что иное, как изменение напряженности собственного гравиполя от деформации вращаемого тела, то последнее больше сжимает тело с внешней стороны, чем с внутренней. И поэтому вектор главной нормали результирующего воздействия изменения напряженности собственного гравиполя тела будет направлен не к центру вращения, а от центра. То есть в сторону, противоположную той, которая определяется математически так же, как и при сжатии тела гравиполем Земли (рис. 44).
|
При этом сжатие вращающегося тела (деформация напряженности его гравиполя) происходит как по вертикали, так и по горизонтали, т.е. асимметрично. Зона наибольшего сжатия располагается и со стороны, противоположной центру вращения,
вызывая появление силы Fn и со стороны движения, и со стороны «внешнего», набегающего гравиполя, образуя силу F' (на рис. 46) зоны сжатия показаны штрихами). И если вектор силы Fn направлен от центра крепления и компенсируется растя- Рис. 46 жением нити, то силa F', не имея перед собой препятствий, обеспечивает движение тела по окружности. Сила Fn, направленная от оси вращения, и есть центробежная сила, т.е. сила, на которую наложено табу для употребления в современной физике.
При постоянной скорости v вращения тела (рис. 45) его период тоже будет постоянным, и получаемое из уравнения (3.77) ускорение ап останется неизменным, т.е. по определению ускорением не будет. Структурно же формула (3.77) полностью аналогична формуле (3.79), используемой для нахождения напряженности гравиполя Земли. Поэтому можно утверждать, что формулой (3.78) описывается не ускорение, а неизменная величина напряженности его гравитационного поля, сложившаяся в результате вращательного взаимодействия тела с пространством.
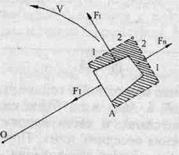
Если нить, удерживающая тело при вращении, обрывается, то тело, раздеформируясь, сохраняет импульс только в одном направлении — в направлении действия тангенциальной силы F'. Импульс обусловлен различной раздеформацией тела по направлению движения и перпендикулярно ему. В момент разрыва раздеформация тела относительно направления движения происходит симметрично и пропорционально скорости, поскольку напряженность внешнего гравиполя по движению оказывается одинаковой со всех сторон. Поперек же направления движения раздеформация сохраняется асимметричной. Напряженность «набегающего» внешнего гравиполя сохраняет неравномерное сжатие гравиполя тела, и оно продолжает полет по касательной к вращению в направлении большей деформации.
Система из вращающегося на оси ротора отличается от системы тела на нерастяжимой нити (рис. 47) тем, что она полностью симметрична, и следует ожидать, что характер ее взаимодействия с эфиром, передающим напряженность внешнего гравиполя, будет отличаться от предыдущего и от того, что предлагается механикой Ньютона. В соответствии с последней вращающийся под действием внешних сил диск не взаимодействует ни с пространством, ни с инертным эфиром, а стремится под действием центробежных сил растягиваться по главной нормали. При этом по мере нарастания скорости вращения происходит удлинение радиуса (рис. 47, а ) и окружности, постепенно доходящие до предела текучести материала. Он начинает течь, в нем возникают трещины, и ротор разрушается так, что его обломки разлетаются в тангенциальном
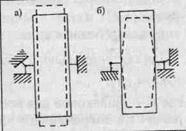
Рис. 47.
направлении. Однако происходящее пространственное изменение не вызывает пропорционального изменения ни массы, ни объема, ни других свойств и не связано ни с каким взаимодействием.
Этот механизм как будто подтверждается многочисленными и убедительными примерами аварий различных вращающихся механизмов, маховиков и роторов.
Математическое описание вращения твердого тела-ротора — почти аналогично приведенному выше (3.74)-(3.78) описанию криволинейного движения точки и в самом общем виде заключается в следующем. Берется несколько точек, лежащих на роторе на одной прямой и движущихся вокруг оси вращения. При этом все точки за один промежуток времени совершают поворот на один угол, а, следовательно, угловые скорости ω всех точек будут одинаковы. Линейная (окружная) скорость точек vi определяется их расстоянием ri от оси вращения:
vi = ωri. (3.82)
Так же как и для криволинейно движущейся точки, определяются нормальное ап (центростремительное) и тангенциальное at ускорения точек тела. Причем каждая точка описывает радиус своей окружности, определяемой для центростремительного ускорения аn' уравнением:
аni = riω2. (3.83)
Для тангенциального ускорения ati:
аti = εri, (3.84)
где ε – одинаковое для всех точек ротора угловое ускорение. По современным представлениям, угловое ускорение — чисто геометрическая величина, определяющая быстроту изменения угловой скорости. Аналогично (3.76) находится и полное линейное ускорение r -й точки тела:
ai = ri√ (ω4 + e2). (3.85)
Все это геометрическое построение ничем, кроме формального совмещения, не связано с физической реальностью. Именно поэтому их логическое продолжение приводит к достаточно некорректному физическому выводу. Дойдем до него.
Поскольку величина полного ускорения аi пропорциональна радиусу, то для точек одного радиуса концы векторов ускорения лежат на одной прямой. Когда угловая скорость возрастает ω > 0, векторы аi лежат по одну сторону радиуса с векторами vi. При ε < 0 векторы аi и vi находятся по разные стороны радиуса. При ε = 0, т.е. при вращении с постоянной угловой скоростью, полное ускорение всех точек направлено по главной нормали аi = ап и, следовательно, тангенциальное ускорение at = О отсутствует. А это тот результат, который автоматически приводит к выводу, что при вращении ротора с постоянной скоростью тангенциальная сила
Ft = atm = 0. (3.86)
Именно уверенность, что угловое ускорение есть геометрическая и только геометрическая величина, не имеющая физического смысла, помогла не заметить присутствия углового ускорения даже тогда, когда геометрически его не должно быть, т.е. при вращении с постоянной скоростью.
Покажу простыми преобразованиями атрибутивность углового ускорения вращающимся телам. Использую возможность определения тангенциального ускорения двумя уравнениями (3.76) и (3.77):
at = εr, (3.87)
ап = at= v /r. (3.88)
Поскольку r = v/ω, то подставляя значения r в (3.88),
имеем:
at = vω. (3.89)
Приравниваем друг к другу правые части уравнений
(3.87) и (3.89), получаем:
ε = vω/r. (3.90)
В правой части (3.90) находятся параметры, без которых невозможно описать ни одно вращение. Они не могут исчезнуть при любом способе вращения ротора, а поэтому не может исчезнуть и угловое ускорение ε. Отсюда следует, что угловое ускорение имеет не только геометрическую, но и физическую значимость. Она может быть подтверждена алгебраически с использованием КФР при образовании с другими параметрами константы, равной MG:
сonst – MG = R3ε = g3/ε2 = v3g/ε =... и т.д.
Угловое ускорение может быть выражено и через другие параметры, связанные не только с вращением.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 369; Нарушение авторских прав?; Мы поможем в написании вашей работы!