КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дискретные пороговые датчики
|
|
|
|
Тактильные датчики
Лекция 23
Тактильные датчики используются в робототехнике для получения информации о контакте манипулятора с объектами в рабочем пространстве. Тактильная информация может использоваться, например, для определения местоположения объекта или его распознавания, а также для управления усилием захватного устройства, воздействующего на объект манипулирования.
Тактильные датчики подразделяются на два основных типа: дискретные и аналоговые. Дискретные датчики, как правило, срабатывают при наличии или отсутствии объекта, в то время как выходной сигнал аналоговых датчиков пропорционален прикладываемому усилию.
Дискретные тактильные датчики являются контактными приборами типа микропереключателей. В простейшем случае переключатель размещен на внутренней поверхности каждого пальца манипулятора (рис. 23.1).
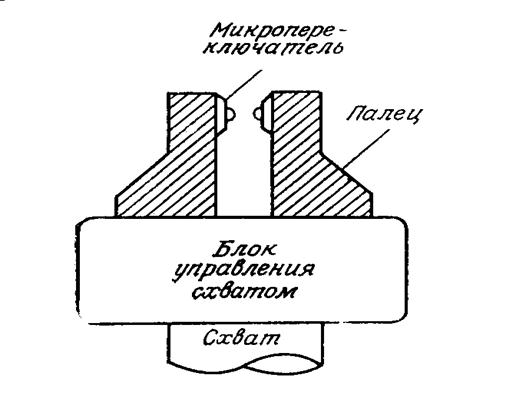
Рисунок 23.1. Простой схват робота с бинарными тактильными датчиками
Этот вариант очувствления используется для определения наличия детали между пальцами схвата. Перемещая манипулятор над объектом и последовательно производя контактирование с его поверхностью, можно также осуществить центрирование манипулятора относительно объекта для его схвата и переноса.
Путем размещения нескольких дискретных тактильных датчиков на внутренней поверхности каждого пальца схвата достигается расширение получаемого объема информации. Кроме того, они часто ставятся на внешней поверхности конечного звена манипулятора для получения управляющих сигналов, используемых при формировании траектории движения манипулятора в рабочем пространстве («ощупывание»).
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 719; Нарушение авторских прав?; Мы поможем в написании вашей работы!