КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ВВЕДЕНИЕ. Учебно – наглядное пособие
|
|
|
|
Казань – 2008
ПРИКЛАДНАЯ МЕХАНИКА
Ю.А. Козиков, О.Ю. Павлов
Имени МАРШАЛА АРТИЛЛЕРИИ М.Н.ЧИСТЯКОВА
КАЗАНСКОЕ ВЫСШЕЕ АРТИЛЛЕРИЙСКОЕ КОМАНДНОЕ
КАЗАНЬ - 2008
Учебно – наглядное пособие
ПРИКЛАДНАЯ МЕХАНИКА
Электромеханический привод с одноступенчатым цилиндрическим редуктором
УЧИЛИЩЕ (ВОЕННЫЙ ИНСТИТУТ)
Рекомендации для выполнения курсового проекта
«электромеханический привод с одноступенчатым цилиндрическим редуктором»
Учебно – наглядное пособие
Допущено ученым советом Казанского высшего артиллерийского
командного училища в качестве учебно - наглядного пособия для курсантов
училища, обучающихся по направлению подготовки ″Электротехника,
электромеханика и электротехнологии″;
по специальности ″Электромеханика″ и по военной специальности ″Применение подразделений артиллерии″
Рекомендации для выполнения курсового проекта на тему «Проект электромеханического привода с одноступенчатым цилиндрическим редуктором» соответствуют программе обучения курсантов по учебной дисциплине «Прикладная механика» по направлению подготовки «Электротехника, электромеханика и электротехнологии»; по специальности «Электромеханика» и по военной специальности «Применение подразделений артиллерии».
Рекомендации предназначены для оказания помощи курсантам при проектировании электромеханических приводов механизмов штатной техники с одноступенчатым цилиндрическим прямозубым (косозубым) редуктором в ходе выполнения курсовых проектов, выпускных квалификационных и расчетно – графических работ. В рекомендациях приведены примеры расчета одноступенчатых цилиндрического прямозубого и косозубого редукторов.
|
|
|
Рекомендации являются учебно – наглядным пособием и предназначены для курсантов, обучающихся в высшем артиллерийском командном училище (военном институте).
Рекомендации разработаны доцентом Козиковым Ю.А. и кандидатом технических наук, доцентом Павловым О.Ю.
Иллюстраций – 15, таблиц – 9, библиографий – 4 (назв.).
Ответственный за выпуск ПАВЛОВ О.Ю.
Машиностроению принадлежит ведущая роль среди других отраслей народного хозяйства. На основе развития машиностроения осуществляется механизация и автоматизация производства техники и вооружения, в том числе ракетно-артиллерийской. Предметом изучения прикладной механики являются механические системы, широко применяемые в технике и вооружении, которые являются продуктом производства машино- и приборостроения. Современный офицер артиллерист должен уметь производить инженерные расчеты и знать основы конструирования, чтобы эти знания можно было бы применить в дальнейшем для качественного освоения новых образцов техники и вооружения.
Курсовой проект имеет целью научить курсантов самостоятельно применять полученные знания для комплексного решения конкретных практических задач. Привить навыки проектирования, производства расчетов, самостоятельного проведения научных исследований и обоснования принимаемых решений.
Для выполнения курсового проекта курсанту выдается задание, в котором указывается тема проекта, целевая установка, исходные данные, основные вопросы, подлежащее разработке и рекомендуемая литература.
По исходным данным следует произвести ряд расчетов, сделать проверочные расчеты, выбрать тип подшипников, муфту, выполнить сборочный чертеж редуктора, рабочий чертеж детали, кинематическую схему электропривода, оформить пояснительную записку.
|
|
|
Во введении необходимо раскрыть тему проекта на примерах машин общего назначения и механизмов штатной техники и определить целевое назначение данного проекта.
В заключении необходимо сформулировать основные результаты проектировочного расчета и конструктивной разработки спроектированного привода и рекомендации по его применению в конструкциях артиллерийского вооружения.
1 ОБЩИЙ РАСЧЕТ ПРИВОДА
Для заданной принципиальной кинематической схемы привода общий расчет включает: выбор электродвигателя, кинематический расчет и силовой расчет.
1.1 Кинематическая схема и ее анализ. Исходные данные
Исходными данными являются: кинематическая схема привода; мощность на выходном валу Рвых; частота вращения выходного вала nвых; ресурс работы t.
Кинематические схемы привода приведены на рис. 1,1 и 1,2

Рис.1.1 Кинематическая схема привода с одноступенчатым цилиндрическим прямозубым редуктором
Привод включает (рис.3.2 [2], рис.1.1, рис. 1.2) электродвигатель М, сам редуктор закрытого типа и исполнительный механизм А, которые соединены муфтами Х1 и Х2. Редуктор одноступенчатый цилиндрический прямозубый (косозубый). Входной вал В1 и выходной вал В2 вращаются в подшипниках качения (две пары). Выходной вал соединяется с исполнительным механизмом (рабочим органом), в качестве которого могут быть, например, подъемный или поворотный механизм артиллерийского орудия (БМ РСЗО), барабан лебедки крана и т.п.
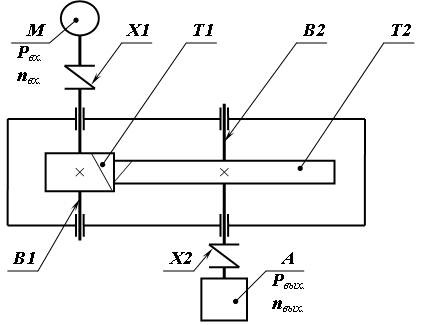
Рис.1.2 Кинематическая схема привода с одноступенчатым цилиндрическим косозубым редуктором
Поскольку электромеханический привод (ЭМП) является составной частью САУ или БМ РСЗ0 и планируется к эксплуатации в полевых условиях, которые характеризуются температурным диапазоном от –500 до +500 С, повышенной, свыше 80% влажностью, наличием пыли и грязи, высокой ремонтопригодностью, то эти условия определяют, что ЭМП должен содержать надежные стандартные, широко распространенные составные узлы и детали, иметь корпус закрытого типа.
В качестве примера рассмотрим расчет электромеханического привода с одноступенчатым цилиндрическим прямозубым (косозубым) редуктором для исполнительного механизма штатной техники с параметрами: мощность на выходном валу редуктора Рвых = 1,8 кВт; частота вращения выходного вала nвых = 150 об/мин; нагрузка спокойная, переменная, реверсивная; ресурс работы t не менее 30000 часов.
|
|
|
1.2 Выбор электродвигателя
Наибольшее применение в приводах общего назначения находят электродвигатели переменного тока, асинхронные, закрытые, обдуваемые, различного исполнения (ГОСТ 19523-74) с синхронной частотой вращения ротора 3000, 1500, 1000 и 750 мин-1 (об/мин) различной мощности, характеристики которых приведены в таблицах 9, 10, [4].
Так как базовым источником электроэнергии приводов механизмов наведения САУ и БМ РСЗО является генератор (или АКБ) постоянного тока напряжением не выше 27 В, то выбираемый злектродвигатель должен быть постоянного тока, а полевые условия эксплуатации накладывают дополнительные ограничения – он должен быть закрытого типа с принудительной вентиляцией, а наличие требований к переменной и реверсивной нагрузке обуславливает также применение электродвигателя со смешанным возбуждением.
Характеристики рекомендуемых электродвигателей приведены в таблицах 11, 12, 13 [4].
Установка ЭМП на подвижном основании (базовой части автомобиля, станины артиллерийского орудия) подразумевает наличие угловых и линейных несоосностей осей соединяемых вала электродвигателя и входного вала редуктора, что, в свою очередь, предусматривает соединение их с помощью компенсирующих муфт.
Выбор электродвигателя производится по требуемой мощности на выходном валу электродвигателя Рэ.тр. и по требуемой частоте вращения вала электродвигателя nэ.тр, которая зависит от частоты вращения выходного вала редуктора nвых и схемы привода, определяющей передаточное отношение ί.
При выборе электродвигателя следует иметь ввиду, что при примерно одинаковых размерах, массе и стоимости электродвигателей с уменьшением nэ, уменьшаются передаточное число привода и и размеры передач.
Для редукторов передаточное отношение численно равно передаточному числу, т.е. ί = u.
Требуемую мощность электродвигателя определяют по формуле
|
|
|
Рэ.тр. = Рвых / η, (1.1)
где η – КПД цилиндрической передачи, ориентировочные значения которых с учетом потерь в подшипниках находятся в пределах η = 0,96…0,98 (таблица 14 [4]).
Рэ.тр = 1,8/(0,96…0,98) = (1,87…1,84) кВт;
Требуемую частоту вращения вала электродвигателя определяют по формуле
nэ.тр = nвых u, (1.2)
где u = 2,0... 6,3 – передаточное число цилиндрической передачи (таблица 14 [4]).
nэтр. = 150 (2,0…6,3) = (300 …945) об/мин.
Учитывая условия выбора:
Рэ ≥ Рэ.тр и nэ.тр min ≤ nэ.тр ≤ nэ.тр max, по таблице 11 [4] выбираем электродвигатель 2ПН132 LУХЛ4 с параметрами Рэ=1,9 кВт, nэ.тр=750об/мин. Электродвигатель постоянного тока серии 2ПН общепромышленного применения, напряжением 27В, закрытого типа с принудительной вентиляцией, 4-х полюсный, высота оси вала от опорной поверхности лапок двигателя 132 мм, для умерено – холодного климата.
1.3 Кинематический расчет привода
Кинематический расчет привода включает:
определение передаточного числа привода (редуктора);
расчет угловых скоростей и частоты вращения валов.
Передаточное число привода определяют по формуле
u = nэд/nвых. (1.3)
Частота вращения валов В1 и В2:
n1 = nэ; n2 = nэ/u.= nвых. (1.4)
Угловые скорости вращения валов:
ω1 =  ; ω2 =
; ω2 =  . (1.5)
. (1.5)
В результате расчетов получим:
u = 750 / 150 = 5; n1 = 750 об/мин; n2 = 150 об/мин;
ω1 = (3,14·750) / 30 = 78,5 рад/с; ω2 = (3,14· 150) / 30 = 15,7 рад/с.
1.4 Силовой расчет привода
Силовой расчет привода заключается в определении вращающих моментов на валах:
на выходном валу Т2 = Р2/ω2; (1.6)
на входном валу Т1 = Т2/(u· η).
Соответственно
Т2 = (1,8·103) / 15,7 = 114,6 Н·м; Т1 = 114,6 / (5 (0,96…0,98)) = (23,9…23,4) Н·м.
Принимаем Т1 = 23,9 Н·м.
Результаты общего расчета привода приведены в таблице 1.
Таблица 1
Результаты общего расчета привода
| Наименование параметров и размерность | Обозначение | Величина |
| Мощность электродвигателя, кВт Требуемая мощность электродвигателя, кВт | Рэ Рэ.тр = Рвх | 1,9 1,87 |
| КПД привода | η | 0,96 |
| Передаточное число привода: | и | |
| Частоты вращения валов, мин-1 (об/мин): вала электродвигателя (входного вала) выходного вала редуктора | nэ = n1 n2 = nвых | |
| Угловые скорости вращения валов, рад/с: вала электродвигателя (входного вала) выходного вала редуктора | ω1 ω2 | 78,5 15,7 |
| Вращающие моменты на валах, Н·м: на входном валу на выходном валу | Т1 Т2 | 23,9 114,6 |
| Диаметр вала электродвигателя, мм | dэ | |
| Ресурс работы, час | t |
2 РАСЧЕТ ЦИЛИНДРИЧЕСКОЙ ПРЯМОЗУБОЙ (КОСОЗУБОЙ) ПЕРЕДАЧИ
2.1 Расчетная схема. Исходные данные
Расчетная схема прямозубой передачи представлена на рисунке 2.1.
Исходные данные для расчета берутся из общего расчета привода:
вращающий момент на колесе Т2 = 114,6 Н·м;
передаточное число u = 5;
ресурс работы t = 30000 часов.
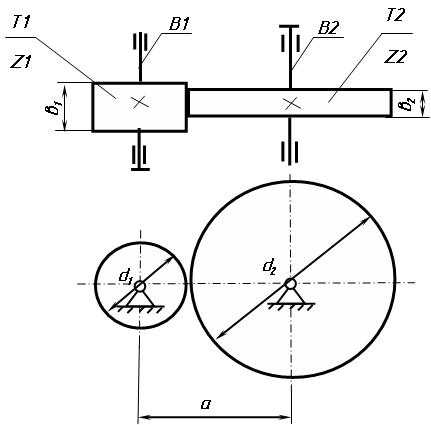
Рис.2.1 Расчетная схема цилиндрической прямозубой передачи
2.2 Выбор материала и термической обработки колес
Материалы для изготовления зубчатых колес подбирают по таблице 16 [4]. В зависимости от условий эксплуатации, требований к габаритам передачи, технологии изготовления и с учетом экономических показателей применяют как среднеуглеродистые, так и высокоуглеродистые стали с различными вариантами термообработки (улучшение, закалка ТВЧ, цементация).
Чем выше твердость рабочей поверхности зубьев, тем выше допускаемые контактные напряжения [σ ]н и тем меньше размеры передачи, но сложнее технология изготовления колес и выше стоимость.
Для предотвращения заедания рабочих поверхностей твердость материала шестерни (меньшего колеса), как показывает практика, должна быть выше твердости колеса при одной и той же марке материала.
Так как в задании нет особых требований в отношении габаритов передачи, выбираем широко применяемые недорогие материалы (таблица 16 [4]): для колеса – сталь 40Х, термообработка – улучшение, твердость поверхности зубьев 235…262 НВ; для шестерни – сталь 40Х, термообработка – улучшение, твердость поверхности зубьев 269…302 НВ.
2.3 Допускаемые контактные напряжения
Допускаемые контактные напряжения определяют отдельно для колеса [σ]H2 и шестерни [σ]H1 по формуле
[σ]H = КHL[σ]HO,
где [σ]HO – допускаемые напряжения, соответствующие базовым числам циклов нагружений, [σ]HO = 1,8 НВср + 67 (таблица 17 [4]);
КHL – коэффициент долговечности при расчете по контактным напряжениям. При N ≥ NНО КHL = 1,0, при других значениях N рассчитывается по формуле КHL =  ≤ 2,6.
≤ 2,6.
При расчете на контактную прочность базовые числа циклов нагружений определяют по формуле Nно = (НВ)ср3, в зависимости от средней твердости материала колес НВср = 0,5 (НВmin + НВmax). (2.1)
Действительные числа циклов перемены напряжений:
для колеса N2 = 60 · n2 · Lh; (2.2)
для шестерни N1 = N2 · u,
где Lh = t - время работы передачи.
Допускаемые контактные напряжения определяют по формулам
[σ ] Н1 = КHL1[σ]Н01;
(2.3)
[σ ] Н2 = КHL2 [σ ] Н02.
В соответствии с изложенным определяется средняя твердость материала:
колеса НВср = 0,5 (235 + 262) = 248,5;
шестерни НВср = 0,5 (269 + 302) = 285,5.
Базовые числа циклов нагружений:
колеса NНО2 = 248,53 = 15,3 · 106;
шестерни NНО1 =285,53 = 23,3 · 106.
Действительные числа циклов перемены напряжений:
колеса N2 = 60 ·150·30000 = 270·106;
шестерни N1 = 270·106·5 = 1350·106.
Поскольку N2 = 270·106 > N НО2 = 15,3 ·106, то КHL2 = 1;
N1 = 1350·106 > NНО1 = 23,3·106, то КHL1 =1;
[σ ]Н02 = 1,8 ·248,5 + 67 = 514 Н/мм2;
[σ ]Н01 = 1,8 · 285,5 + 67 = 581 Н/мм2,
тогда допускаемые контактные напряжения будут иметь значения:
[σ ]Н2 = 514 Н/мм2, [σ ]Н1 = 581 Н/мм2.
Для дальнейших расчетов принимается меньшее из значений
[σ ]Н2 и [σ ]Н1, т.е. [σ ]Н = 514 Н/мм2.
2.4 Допускаемые изгибные напряжения
Допускаемые напряжения изгиба определяют отдельно для колеса [σ]F2 и шестерни [σ]F1 по формуле [σ]F = КFL [σ]F0,
где КFL – коэффициент долговечности при расчете на изгиб, КFL = 1,0 при N ≥ 4∙106; при других значениях N рассчитывается по формуле
КFL =  ≤ 2,08;
≤ 2,08;
[σ]F0 – допускаемые предельные напряжения изгибной выносливости зубьев, соответствующие базовым числам циклов напряжений при расчете на изгиб NF0 = 4·106, выбираются по таблице 17 [4] в зависимости от средней твердости колес НВср.
Для нашего случая [σ]F0 = 1,03 НВср
Допускаемые изгибные напряжения для колеса и шестерни определяются по формулам:
[σ ]F2 = КFL2 [σ ]F02; (2.4.)
[σ ]F1 = КFL1 [σ ]F01,
Так как действительные числа циклов перемены напряжений
N2 = 270 · 106 > 4·106, то КFL2 = 1;
N1 = 1350 · 106 > 4 · 106, то КFL1 = 1.
В этом случае [σ]F02 = 1,03 · 248,5 = 256 Н/мм2;
[σ ]F01 = 1,03 · 285,5 = 294 Н/мм2,
и допускаемые изгибные напряжения будут иметь значения:
[σ]F2 = 256 Н/мм2, [σ]F1 = 294 Н/мм2.
2.5 Проектировочный расчет
2.5.1 Межосевое расстояние
Межосевое расстояние определяется из условия контактной прочности зубьев
σН ≤ [σ]Н.
Межосевое расстояние
а ≥ К а (u +1)  , (2.5)
, (2.5)
где а – межосевое расстояние в мм;
К а – коэффициент межосевого расстояния (для прямозубых колес
К а = 49,5; для косозубых и шевронных колес К а = 43);
u – передаточное число;
ψ а – стандартное значение коэффициента ширины колес (при симметричном расположении колес относительно опор
ψ а = 0,315);
Т2 – вращающий момент в Н·мм;
[σ ]Н – допускаемое контактное напряжение в Н/мм2 (МПа);
КНβ – коэффициент концентрации нагрузки (при НВ≤350 КНβ = 1).
Таким образом, для прямозубой передачи:
а = 49,5 (5+1)  мм.
мм.
Вычисленное межосевое расстояние округляем в большую сторону до стандартного числа по таблице 1 [4 ] а = 120 мм.
Для косозубых колес,
а = 43 (5+1)  мм.
мм.
Вычисленное межосевое расстояние округляем в большую сторону до стандартного числа а = 100 мм.
2.5.2 Предварительные основные размеры колеса
2.5.2.1 Предварительные основные размеры прямозубого колеса
Делительный диаметр
d'2= 2а u / (u + 1) =  = 200 мм, (2.6)
= 200 мм, (2.6)
ширина колес в 2 = Ψ а а = 0,315 · 120 = 37,8 мм. (2.7)
Ширину колеса после вычисления округляем в ближайшую сторону до целого числа, т.е. в 2 = 38 мм.
2.5.2.2 Предварительные основные размеры косозубого колеса
Делительный диаметр
d'2= 2а u / (u + 1) =  = 166,7 мм,
= 166,7 мм,
ширина колеса в 2 = Ψ а а = 0,315 · 100= 31,5 мм.
Ширину колеса после вычисления округляем в ближайшую сторону до целого числа, т.е. в 2 = 32 мм.
2.5.3 Модуль передачи (зацепления)
Модуль зацепления является важнейшим параметром зубчатой передачи, он должен быть стандартным, одинаковым для колеса и шестерни, по нему нарезают зубья колес с помощью инструментальной рейки и рассчитывают геометрические параметры колес.
Предварительно модуль передачи определяют по формуле
m' ≥  , (2.8)
, (2.8)
где Кm - коэффициент модуля для колес: прямозубых – 6,8; косозубых – 5,8; шевронных – 5,2;
[σ ]F - допускаемое изгибное напряжение, подставляют меньшее из [σ]F1 и [σ ]F2., т.е. [σ]F = [σ]F2 = 256 Н/мм2 (МПа).
Значение модуля передачи m в мм, полученное расчетом, округляют в большую сторону до стандартного (ГОСТ 9563-80) из ряда чисел (таблица 19 [4]).
При выборе модуля 1-й ряд следует предпочитать 2-му.
В результате расчета получим модуль передачи прямозубого зацепления
m' =  мм.
мм.
Принимаем стандартное значение m = 1 мм.
В результате расчета получим модуль передачи косозубого зацепления
m' =  мм.
мм.
Принимаем стандартное значение m = 1 мм.
2.5.4 Числа зубьев колес
2.5.4.1 Числа зубьев прямозубых колес
Суммарное число зубьев для прямозубых колес
zΣ = 2 a / m2 (2.9)
Число зубьев шестерни
z1 =  . (2.10)
. (2.10)
Значение z1 округляют в ближайшую сторону до целого:
z 1min = 17 – для прямозубых колес из условия неподрезания при нарезании.
Число зубьев колеса
z2 = zΣ – z1. (2.11)
В результате вычислений получим:
zΣ =  = 240;
= 240;
z1 =  > 17;
> 17;
z2 = 240 – 40 = 200.
2.5.4.2 Числа зубьев косозубых колес
Суммарное число зубьев косозубых и шевронных колес
zΣ =  . (2.12)
. (2.12)
Минимальный угол наклона зубьев:
косозубых колес
βmin = arc sin  ; (2.13)
; (2.13)
шевронных колес βmin = 250.
Полученное значение zΣ округляют в меньшую сторону до целого и определяют действительное значение угла β, с точностью вычисления до четвертого знака после запятой
β = аrc cos  . (2.14)
. (2.14)
Для косозубых колес β = 8…180.
Число зубьев шестерни
z1 = . (2.15)
Значение z1 округляют в ближайшую сторону до целого:
z 1min = 17cos3β – для косозубых и шевронных колес.
Число зубьев колеса
z2 = zΣ – z1.
В результате вычислений получим:
Минимальный угол наклона зубьев косозубых колес
βmin = arc sin  = 7,180
= 7,180
Суммарное число зубьев косозубых колес
zΣ = =  = 198,4, принимаем zΣ =198.
= 198,4, принимаем zΣ =198.
Определяем действительное значение угла β косозубых колес
β = аrc cos  = 8,10960
= 8,10960
Получаем число зубьев для шестерни и колеса:
z1 =  ; z2 = 198 – 33 = 165.
; z2 = 198 – 33 = 165.
2.5.5 Фактическое передаточное число
Фактическое передаточное число
uф = 
Допускаемое отклонение [∆ и ] ≤ 4%.
Отклонение от заданного передаточного числа
Δu =  %.
%.
Таким образом, для прямозубой передачи:
uф = 200/40 = 5; Δu =  .
.
Таким образом, для косозубой передачи:
uф = 165/33 = 5, которое принимается для дальнейших расчетов.
Δu = %.
2.5.6 Размеры колес
Делительные диаметры шестерни d1 и колеса d2 определяются с точностью расчета до третьего знака после запятой:
d1 =  , (2.16)
, (2.16)
d2 = 2 a – d1.
Диаметры окружностей вершин d a и впадин зубьев df:
шестерни d a1 = d 1 + 2m; df1 = d1 – 2,5m; (2.17)
колеса d a2 = d 2 + 2m;df2 = d 2 – 2,5m..
Ширину шестерни в 1 (мм) принимают по соотношению в1/в2, где в2 – ширина колеса.
При в2 …….. до 30; св. 30 до 50; св.50 до 80; св.80 до 100
в1/в2 …. 1,1; 1,08; 1,06; 1,05.
Полученное значение в 1 округляют до целого числа.
2.5.6.1 Размеры колес прямозубой передачи
Определяем размеры колес:
шестерни d1 = 40 ·1,0 = 40 мм; колеса d2 = 2·120 – 40 = 200 мм.
Диаметры окружностей вершин зубьев:
шестерни d а1 = 40 + 2·1,0 = 42 мм; колеса d а2 = 200+2·1,0 = 202 мм.
Диаметры окружностей впадин зубьев:
шестерни df1 = 40 – 2,5·1,0 = 37,5 мм; колеса df2 = 200 – 2,5·1,0=197,5мм.
Ширина колеса в нашем случаи в 2 = 38 мм., тогда
в 1 = 38· 1,08 = 41 мм. Полученное значение в 1 округляют до целого числа.
Высота головки зуба h а = m = 1 мм.
Высота ножки зуба h f = 1,25· m = 1,25·1 = 1,25 мм.
Высота зуба h = h a + h f = 1 + 1,25 =2,25 мм.
Окружной шаг p = πm = 3,14·1 = 3,14 мм.
Толщина зуба s, равная ширине впадины «е», т.е. s = e = 0,5p = 0,5·3,14 = 1,57 мм.
Радиальный зазор между зубьями с = 0,25m = 0,25∙1 = 0,25 мм.
2.5.6.2 Размеры колес косозубой передачи
Определяем размеры колес:
шестерни d1 =  = 33,333 мм;
= 33,333 мм;
колеса d2 = 2·100 – 33,333 = 166,666 мм;
Диаметры окружностей вершин зубьев:
шестерни d а1 = 33,333 + 2·1,0 = 35,3 мм;
колеса d а2 = 166,666 +2·1,0 = 168,7 мм.
Диаметры окружностей впадин зубьев:
шестерни df1 = 33,333 – 2,5·1,0 = 30,8 мм;
колеса df2 = 166,666 – 2,5·1,0=164,2 мм.
Ширина колеса в нашем случаи. в 2 = 32 мм., тогда
в 1 = 32· 1,08 = 34,56 мм. Полученное значение в 1 округляют до целого числа в 1 = 35.
Высота головки зуба h а = m = 1 мм.
Высота ножки зуба h f = 1,25· m = 1,25·1 = 1,25 мм.
Высота зуба h = h a + h f = 1 + 1,25 =2,25 мм.
Окружной шаг p = πm = 3,14·1 = 3,14 мм.
Толщина зуба s, равная ширине впадины е, т.е. s = e = 0,5p = 0,5·3,14 = 1,57 мм.
Радиальный зазор между зубьями с = 0,25m = 0,25∙1 = 0,25 мм.
2.5.7 Силы в зацеплении
В прямозубом зацеплении действуют окружная и радиальная силы. Осевая сила для прямозубой передачи равна нулю, так как β = 0. В косозубом зацеплении действуют окружная, радиальная и осевая силы.
Окружная сила
Ft =  . (2.18)
. (2.18)
Радиальная сила
Fr =  , (2.19)
, (2.19)
где α = 200 – стандартный угол зацепления. Для стандартного угла
tgα = tg200 = 0,364.
Осевая сила
F a = Ft tgβ. (2.20)
В результате расчетов прямозубого зацепления получим:
окружная сила Ft =  Н;
Н;
радиальная сила Fr = 1146·0,364 = 417 Н;
осевая сила F a = 0.
В результате расчетов косозубого зацепления получим:
окружная сила Ft =  Н;
Н;
радиальная сила Fr =  Н;
Н;
осевая сила F a = 1375 0,1425 = 196 Н.
2.5.8 Степень точности зацепления
Степень точности передачи определяют по таблице 2 в зависимости от окружной скорости колеса
V =  (м/с).
(м/с).
Таблица 2
К определению степени точности зацепления
| Степень точности | Окружные скорости V, м/с | |
| прямозубых | непрямозубых | |
| до 15 до 10 до 6 до 2 | до 30 до 15 до 10 до 4 |
Окружная скорость прямозубого колеса
V = (3,14·200·150) /60000 = 1,57 м/с,
Окружная скорость косозубого колеса
V = (3,14·166,7·150) /60000 = 1,31 м/с,
По окружной скорости определяем 9-ю степень точности зацепления.
2.6 Проверочный расчет
Проверочный расчет производится по методикам, определенным ГОСТ 21354-87 «Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет на прочность».
2.6.1 Проверка зубьев колес по напряжениям изгиба зубьев
Условие прочности σF ≤ 1,1 [σ ]F, где σF – расчетное напряжение изгиба.
Расчетное напряжение изгиба в зубьях колеса
σF2 =  , (2.21)
, (2.21)
где КFα – коэффициент, учитывающий распределение нагрузки между зубьями:
для прямозубых колес КFα = 1;
для колес с углом β>00 принимают КFα в зависимости от степени точности:
степень точности … ….6 7 8 9
КFα........... 0,72 0,81 0,91 1,0;
Yβ = 1 – (β0/140) – коэффициент, учитывающий влияние наклона зуба;
КFβ – коэффициент, учитывающий неравномерность распределения нагрузки по длине контактных линий; для приработанных зубьев колес и скорости V ≤ 15 м/с, КFβ = 1;
КFY – коэффициент, учитывающий внутреннюю динамическую нагрузку, принимают:
для прямозубых колес при твердости зубьев ≤ 350 НВ – 1,4;
> 350 НВ – 1,2;
для косозубых колес при твердости зубьев ≤ 350 НВ – 1,2;
> 350 НВ – 1,1;
YF – коэффициент формы зуба, принимают по эквивалентному числу зубьев zV = z/ cos3β, по таблице 3.
Таблица 3
К определению коэффициента формы зуба
| zV | >80 | ||||||||||||
| YF | 4,27 | 4,07 | 3,98 | 3,92 | 3,88 | 3,84 | 3,80 | 3,75 | 3,7 | 3,66 | 3,65 | 3,62 | 3,61 |
Расчетное напряжение изгиба в зубьях шестерни
σF1 =  . (2.22)
. (2.22)
Расчетное напряжение изгиба могут отклоняться от допускаемых
σF ≤ 1,1 [σ ]F.
2.6.1.1 Проверка зубьев прямозубых колес по напряжениям изгиба зубьев
Используя формулы (2.21) и (2.22), получим
σF2 =  Н/мм2;
Н/мм2;
σF1 =  Н/мм2.
Н/мм2.
Условия прочности зубьев по напряжениям изгиба выполняются, так как
σF2 = 152 Н/мм2 < [σ]F2 = 256 Н/мм2;
σF1 = 156 Н/мм2 < [σ ]F1 = 294 Н/мм2.
2.6.1.2 Проверка зубьев косозубых колес по напряжениям изгиба зубьев
Используя формулы (2.21) и (2.22), получим
σF2 =  Н/мм2;
Н/мм2;
σF1 =  Н/мм2.
Н/мм2.
Условия прочности для косозубых зубьев по напряжениям изгиба также выполняются так как
σF2 = 159 Н/мм2 < [σ]F2 = 256 Н/мм2;
σF1 = 165,6 Н/мм2 < [σ ]F1 = 294 Н/мм2.
2.6.2 Проверка зубьев колес по контактным напряжениям
Условие прочности σН = (0,9...1,05) [σ ]Н.
Расчетное контактное напряжение:
для прямозубых колес
σН = 436  ; (2.23)
; (2.23)
для косозубых и шевронных колес
σН = 376  , (2.24)
, (2.24)
где КНα – коэффициент, учитывающий распределение нагрузки между зубьями: для прямозубых колес КНα = 1,0;
для косозубых и шевронных КНα = 1,1;
КНβ – коэффициент концентрации нагрузки, для приработанных зубьев колес и скорости V ≤ 15 м/с, КНβ = 1;
КНV – коэффициент динамической нагрузки. Для прямозубых колес при твердости зубьев ≤ 350 НВ – 1,2; > 350 НВ – 1,1; для косозубых и шевронных колес при твердости зубьев ≤ 350 НВ – 1,1; > 350 НВ – 1,05.
u- передаточное число, определенное в пункте 2.5.5
Используя формулу (2.23), получим для прямозубой передачи
σН = 436  Н/мм2.
Н/мм2.
σН = (0,9...1,05) [σ ]Н. = (0,9...1,05) 514 =(462,6…..539,7) Н/мм2.
Условие прочности зубьев по контактным напряжениям не выполняется, так как σН = 454 Н/мм2 не укладывается в интервале (462,6…..539,7) Н/мм2, поэтому принимаем в 2 = 36 мм, тогда
σН = 436  Н/мм2.
Н/мм2.
Используя формулу (2.24), получим для косозубой передачи
σН = 376  = 514,4Н/мм2.
= 514,4Н/мм2.
σН = (0,9...1,05) [σ ]Н. = (0,9...1,05) 514 =(462,6…..539,7) Н/мм2
Условие прочности зубьев по контактным напряжениям для косозубой передачи выполняется.
Результаты расчета цилиндрической прямозубой передачи приведены в таблице 4.
Таблица 4
Результаты расчета прямозубой передачи
| Наименование параметров и размерность | Обозначение | Величина |
| Допускаемое контактное напряжение, Н/мм2 | [σ]н | |
| Допускаемое напряжение изгиба для колеса, Н/мм2 | [σ]F2 | |
| Допускаемое напряжение изгиба для шестерни, Н/ мм2 | [σ]F1 | |
| Межосевое расстояние, мм | а | |
| Модуль передачи (зацепления), мм | m | |
| Число зубьев шестерни | Z1 | |
| Число зубьев колеса | Z2 | |
| Фактическое передаточное число | и ф | |
| Делительный диаметр шестерни, мм | d1 | |
| Делительный диаметр колеса, мм | d2 | |
| Диаметр окружности вершин зубьев шестерни, мм | d а 1 | |
| Диаметр окружности вершин зубьев колеса, мм | d а 2 | |
| Диаметр окружности впадин зубьев шестерни, м | d f1 | 37,5 |
| Диаметр окружности впадин зубьев колеса, мм | d f2 | 197,5 |
| Ширина зубчатого венца шестерни, мм | в 1 | |
| Ширина зубчатого венца колеса, мм | в 2 | |
| Высота головки зуба, мм | h a | |
 Высота ножки зуба, мм Высота ножки зуба, мм
| h f | 1,25 |
| Высота зуба, мм
| h | 2,25 |
| Окружной шаг, мм | p | 3,14 |
| Толщина зуба, ширина впадины, мм | s = e | 1,57 |
| Окружная сила, Н | Ft | |
| Радиальная сила, Н | Fr | |
| Осевая сила, Н | Fа | |
| Расчетное напряжение изгиба, Н/мм2: | ||
| зубьев шестерни | σF1 | |
| зубьев колеса | σF2 | |
| Расчетное контактное напряжение зубьев, Н/мм2 | σн |
Аналогично составляется таблица результатов расчета косозубой передачи.
| |||
|
3 ЭСКИЗНОЕ ПРОЕКТИРОВАНИЕ ПЕРЕДАЧИ
При эскизном проектировании определяют ориентировочные диаметры валов, выбирают типы подшипников и схемы их установки, составляют эскизную компоновку деталей передач.
3.1 Проектировочный расчет входного вала
3.1.1 Расчетная схема. Исходные данные
Быстроходные валы (рис.3.1) представляют собой, как правило «вал – шестерню» и имеют концевые участки, участки для установки подшипников, буртики подшипников и участки для нарезания зубьев шестерни. Основные конструктивные схемы валов и обозначений геометрических размеров показаны на рис. 3.1, 3.2, а также на рис. 5.14, 5.15, 22.14 и 22.18 [1]. Валы следует конструировать по возможности гладкими, с минимальным числом уступов, что приводит к существенному сокращению расхода металла на изготовление.
Для осевого фиксирования валов наиболее простой является схема установки подшипников «враспор».
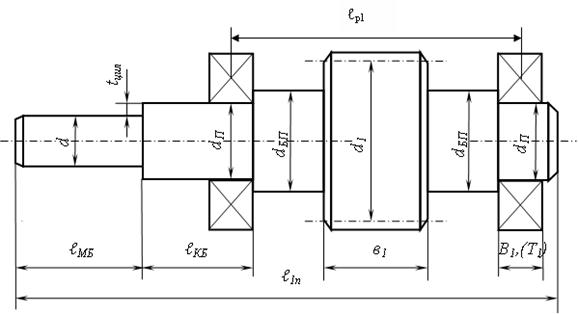
Рис.3.1.Расчетная схема входного вала
Исходные данные:
вращающий момент на входном валу Т1 = 23,9 Н·м;
ширина шестерни в 1 = 41 мм – для прямозубой передачи;
в 1 = 35 мм – для косозубой передачи.
3.1.2 Геометрические размеры входного вала
Минимальный диаметр вала рассчитывается из условия только на кручение, по пониженным допускаемым касательным напряжениям [τ] по формуле:
d =  =
=  = 18,1 мм, (3.1)
= 18,1 мм, (3.1)
округляем до стандартной величины в большую сторону d = 19 мм;
где [τ] = 10…25 Н/мм2;
Т1 вращающий момент на входном валу в Н·мм.
Диаметр вала для установки подшипников dп:
dп = d + 2tцил = 19+2·3,0 = 25 мм, принимаем dп = 25 мм; (3.2)
где tцил определяется по таблице 34 [4].
Рассчитанный диаметр dп округляется до значения, кратного 5.
Диаметр буртика подшипников dБП:
dБП = dп + 3r = 25+3·1,5 = 29,5 мм, округляем до dБП = 30 мм; (3.3)
где r определяется по таблице 34 [4].
Для эскизной компоновки можно принимать (с последующим уточнением):
длину посадочного конца вала ℓМБ = 1,5d = 1,5 · 19 = 28.5 мм;
длину промежуточного участка ℓКБ = 1,4dп = 1,4 · 25 = 35 мм.
Ширина буртиков подшипников уточняется после определения размеров вала; окончательные размеры ℓКБ, ℓМБ – определяются при конструировании крышек подшипников, выбора типа уплотнения и конструировании корпуса редуктора; окончательные размеры ℓМБ и ℓКБ получаются после выбора муфты.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 797; Нарушение авторских прав?; Мы поможем в написании вашей работы!