КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
К исследованию равновесия механизмов
|
|
|
|
Применение принципа возможных перемещений
Принцип возможных перемещений очень эффективен при исследовании равновесия плоских механизмов, т.е. таких, звенья которых движутся в плоскостях, параллельных какой-то неподвижной плоскости. Упрощённо можно считать, что все точки и звенья его движутся по плоскости самого рисунка.
Считая, что все соединения звеньев механизма, как и внешние связи, являются идеальными, мы исключаем из рассмотрения их реакции. Это и определяет преимущества принципа возможных перемещений по сравнению с методами геометрической статики (уравнения равновесия).
Пример 5
Пренебрегая трением, найти соотношение между силами P и Q, при котором кривошипно-ползунный механизм будет находиться в равновесии, если сила  перпендикулярна OA (рис. 2.8).
перпендикулярна OA (рис. 2.8).
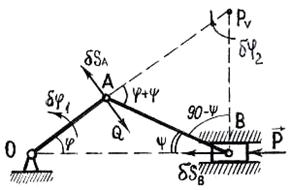
Рис. 2.8
Сообщив механизму возможное перемещение, и приравнивая к нулю сумму работ сил P и Q на этом перемещении, получим
P × dSВ – Q×dSА = 0,
откуда
 ,
,
где dSA и dSB – модули возможных перемещений точек А и В.
Перемещение dSA перпендикулярно OA, dSB направлено по прямой OB. Для определения зависимости между dSB и dSA найдём МЦС звена АВ. Он лежит на пересечении перпендикуляров  и
и  к направлениям возможных перемещений точек А и В. Эти перемещения находятся в такой же зависимости, как скорости точек А и В, т.е.
к направлениям возможных перемещений точек А и В. Эти перемещения находятся в такой же зависимости, как скорости точек А и В, т.е.
 ,
,
поэтому
 .
.
Введя обозначения углов j и y, из  по теореме синусов находим
по теореме синусов находим
 ,
,
откуда
 .
.
Зависимость между возможными перемещениями dSA и dSB можно определить, используя теорему о проекциях скоростей точек A и B на прямую АВ. По этой теореме можно записать:
dSA cos [90 – (j + y)] = dSB × cosy,
откуда
 .
.
Рассмотренную задачу можно было бы решать, применяя методы статики твёрдого тела. Для этого нужно составить уравнения равновесия для каждого звена механизма (кривошипа ОА, шатуна АВ, ползуна В); при этом пришлось бы принять во внимание неизвестные реакции связей (реакции в шарнирах А и В и реакцию направляющих, в которых движется ползун).
|
|
|
При решении задач подобного рода преимущество принципа возможных перемещений очевидно; этот метод позволяет исключить из рассмотрения неизвестные реакции связей, т.к. эти реакции в условие равновесия системы, выраженное принципом возможных перемещений, не входят.
2.6. Применение принципа возможных перемещений
к определению реакций связей
В формулировке принципа возможных перемещений силы реакции не фигурируют. Тем не менее, принцип возможных перемещений можно эффективно применять для определения этих сил, и чем сложней конструкция, тем больше преимущества принципа возможных перемещений по сравнению с методами, применяемыми в геометрической статике (составление и решение уравнений равновесия).
Статические сооружения (конструкции) имеют нулевую степень подвижности, т.е. находятся в равновесии благодаря наличию внешних и внутренних связей. Связь в виде жесткой заделки, наложенная на тело, ограничивает любые его перемещения, поэтому реакцию представляем в виде двух составляющих, направленных по осям координат, и реактивного момента. Шарнирно-неподвижная опора ограничивает перемещение тела по двум взаимно перпендикулярным направлениям, ее реакцию представляем в виде двух составляющих по осям координат.
Применяя принцип освобождаемости от связей, можно отбросить отдельно взятую связь, ограничивающую перемещение тела в одном направлении, заменив ее силой реакции.
В тех случаях, когда связь препятствует перемещению тела в нескольких направлениях (неподвижная шарнирная опора, жесткая заделка), она заменяется другим типом связи, допускающим перемещение в направлении той реакции, которую хотим определить.
|
|
|
Для определения реактивного момента в жесткой заделке она заменяется неподвижной шарнирной опорой и искомым реактивным моментом (рис. 2.9).
Рис. 2.9
Для определения горизонтальной или вертикальной составляющей реакции жесткой заделки она заменяется связью типа стержень в направляющих и искомой реакцией (рис. 2.10, 2.11).

Рис. 2.10
Рис. 2.11
Таким способом можно последовательно определить реакции всех связей. При этом каждый раз отбрасывается та связь, реакцию которой требуется определить, и механическая система получает одну степень свободы.
В тех случаях, когда связь препятствует перемещению тела в нескольких направлениях (неподвижная шарнирная опора, жёсткая заделка), она отбрасывается не полностью, а лишь заменяется более простой. Как это делается, показано на рис. 2.12.
Покажем варианты замены шарнирно-неподвижной опоры при определении её реакций.
Рис. 2.12
Рассмотрим примеры определения опорных реакций составных
конструкций.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1493; Нарушение авторских прав?; Мы поможем в написании вашей работы!