КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие понятия электроприводов
ОСНОВЫ ТЕОРИИ СОВРЕМЕННОГО ЭЛЕКТРОПРИВОДА
| О |
снову теории современного ЭП составляет изучение физических свойств разомкнутых и замкнутых по основным регулируемым координатам систем ЭП, анализ особенностей взаимодействия упругой многомассовой механической части привода с электрической частью в единой электромеханической системе, а также вопросы выбора электродвигателей на основе анализа режимов работы электромехани-ческой системы.
Электрическим приводом называется электромеханическое уст-ройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного, или поступательного движения и включающее электромеханический преобразователь (двигатель), а также устройство управления двигателем.
Рассмотрим структуру автоматизированного ЭП, соответствующего наиболее массовому типу ЭП, блок-схема которого приведена на рис.1.1. ЭП имеет два канала: силовой и информационный. По первому тран-спортируется преобразуемая энергия, по второму осуществляется управление потоком энергии. В общем случае ЭП включает преобра-зователь (П), электромеханический преобразователь (электро-двигатель) (ЭМП(Д)), рабочий механизм РМ, устройство (или устройства) обратной связи(УОС), суммирующий узел (СУ) [2]. Преобразователь, устройство обратной связи и суммирующий узел образуют устройство управления (УУ). В зависимости от типа ЭП в УУ могут входить и другие элементы управления.
Преобразователь – предназначен для преобразования напряжения сети Uсети в напряжение Uпр, другой частоты и величины, напряжение той же частоты и переменной величины, постоянное напряжение, изменяющееся по величине, и т.д. Это напряжение подается на ЭМП (Д), который, развивая на валу вращающий момент М, непосредственно или через передаточное устройство приводит в движение (вращательное или поступательное) рабочий механизм РМ с моментом сопротивления МС. УОС служит для контроля, измерения и последующего учета ЭП регулируемой величины (на рис. 1.1  частоты вращения ω).
частоты вращения ω).
СУ осуществляет функцию суммирования задающего напряжения Uзад и напряжения ОС по частоте вращения или иной величине Uос. Результирующее напряжение управления U рез, равное разности между задающим напряжением и напряжением ОС, определяет выходные пара-метры преобразователя и, следовательно, скорость вращения двигателя.
Рис. 1.1. Структура автоматизированного ЭП
Другие типы ЭП имеют структуру большей или меньшей сложности [5]. Например, в системе автоматизированного ЭП, структурная схема которой приведена на рис.1.2, электрическая мощность, потребляемая из электрической сети (или от автономной энергетической установки) поступает в энергетическую часть системы управления ЭСУ и преоб-разуется в регулируемую электрическую мощность, подводимую к об-моткам электродвигателя. На схеме двигатель представлен двумя эле-ментами – электромеханическим преобразователем ЭМП, преобразу-ющим электрическую мощность в электромагнитную механическую мощность, и массой ротора РД, на которую воздействует момент дви-гателя М при угловой скорости ω. Механическая мощность от ротора двигателя передается передаточному механизму ПМ, который преобра-зует ее и передает рабочему органу машины РМ.
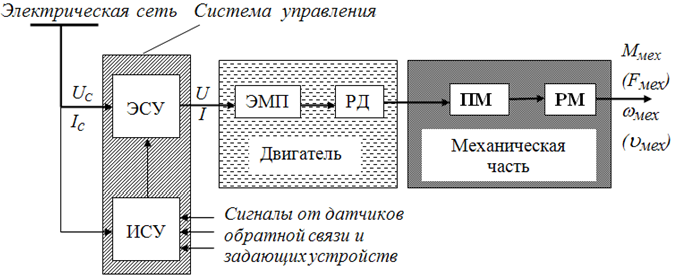
Рис.1.2. Схема автоматизированного ЭП
Система управления ЭП состоит из энергетической части ЭСУ и информационной части ИСУ. Информационная система управления получает командные сигналы от задающих устройств и информацию о состоянии ЭП и течении технологического процесса от датчиков обрат-ных связей ОС. На основании этих данных в соответствии с заложенным алгоритмом здесь выбираются воздействия на электрическую часть системы управления ЭСУ и электромеханический преобразователь ЭМП, управляющее движениемсистемы и технологическим процессом машины.
|
|
Дата добавления: 2014-11-29; Просмотров: 462; Нарушение авторских прав?; Мы поможем в написании вашей работы!