КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЭП ДПТ НВ с однофазным преобразователем
Рассмотрим процесс регулирования скорости для полууправляемого и полностью управляемого преобразователя при допущении непрерыв-ности тока [12].
Двигатель подключен к сети по схеме рис. 6.9, где а – схема силовой цепи; б – диаграммы токов и напряжений для режима непрерывного то-ка. В течение фазового интервала  через тиристор VS1 и диод VD2. Напряжение на двигателе Uя равно питающему U.
через тиристор VS1 и диод VD2. Напряжение на двигателе Uя равно питающему U.
При  напряжение U изменяет полярность, а прямое падение напряжения на обратном диоде VD0 переводит его в открытое состояние. Ток якоря Iя, протекающий ранее от сети через VS1, теперь проходит через VD0 (тиристор VS1 закрыт). Цепь якоря двигателя в течение интервала
напряжение U изменяет полярность, а прямое падение напряжения на обратном диоде VD0 переводит его в открытое состояние. Ток якоря Iя, протекающий ранее от сети через VS1, теперь проходит через VD0 (тиристор VS1 закрыт). Цепь якоря двигателя в течение интервала  закорочена на обратный диод, поэтому Uя = 0. В период открытого состояния тиристора (
закорочена на обратный диод, поэтому Uя = 0. В период открытого состояния тиристора ( ) энергия из сети передается в якорную цепь, превращаясь в энергию электромагнитного поля в индуктивностях якоря Lя, кинетическую энергию вращения механических частей ЭП и полезную работу. В период закрытого сос-тояния тиристора между фазами
) энергия из сети передается в якорную цепь, превращаясь в энергию электромагнитного поля в индуктивностях якоря Lя, кинетическую энергию вращения механических частей ЭП и полезную работу. В период закрытого сос-тояния тиристора между фазами  и
и  запасенная в индуктивностях энергия поля превращается в механическую, а продолжающий протекать по якорной цепи ток Iя создает электромагнитный момент. В этот период энергия в сеть не возвращается.
запасенная в индуктивностях энергия поля превращается в механическую, а продолжающий протекать по якорной цепи ток Iя создает электромагнитный момент. В этот период энергия в сеть не возвращается.
Уравнения для якорной цепи двигателя с полууправляемым преобразователем (рис. 6.9) имеют вид:
 , (6.8)
, (6.8)
 . (6.9)
. (6.9)
Уравнение для якорной цепи двигателя с полностью управляемым преобразователем (рис. 6.9) имеет вид
 . (6.10)
. (6.10)
При синусоидальной форме питающего напряжения, когда  , средние значения напряжений якорной цепи определяются выражениями:
, средние значения напряжений якорной цепи определяются выражениями:
 , (6.11)
, (6.11)
 . (6.12)
. (6.12)
Зависимость напряжения якоря от угла управления представлена на рис. 6.10,а. Инверторному режиму в полностью управляемом преобра-зователе соответствуют углы 90° <α< 180° (характеристика показана штриховой линией рис.6.10,а). Механические характеристики при различных углах управления представлены на рис.6.10,б.Решение уравнений (6.4), (6.7), (6.11), (6.12) относительно угловой скорости ω позволяет получить уравнение механических характеристик для полу- и полностью управляемых схем соответственно:
 ,
,
 . (6.13)
. (6.13)
Первый член правых частей уравнений (6.13) и (6.14) представляет собой скорость идеального ХХ, второй соответствует изменению скоро-сти, происходящему под влиянием протекающего в якоре тока Iя или соответствующего ему электромагнитного момента М, воздействующего на вал. Скорость идеального ХХ, как это следует из уравнений, зависит от угла управления α. Механические характеристики, представленные на рис. 6.10,б, свидетельствуют о хороших регулировочных возможностях.
При больших значениях угла управления тиристоров, высоких ско-ростях и небольших нагрузках на валу ток якоря имеет прерывистый характер, что вызывает увеличение скоростей и уменьшение диапазона регулирования.
В зоне прерывистых токов увеличиваются отношения амплитуды и действующего значения тока якоря к его среднему значению, что отри-цательно сказывается на тепловом режиме двигателя; ухудшаются его динамические показатели. Поэтому целесообразно осуществлять регу-лирование с непрерывным током якоря, для чего в якорную цепь вводятся сглаживающие реакторы.
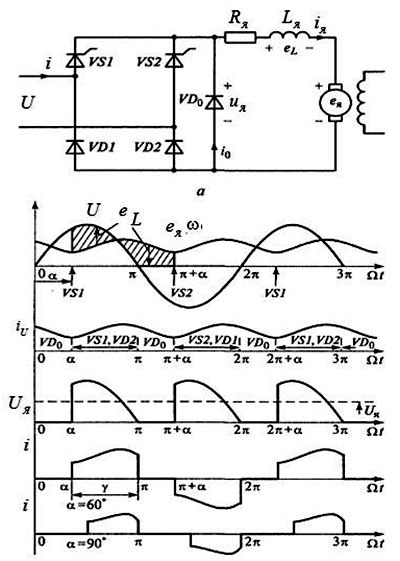
Рис. 6.9. Регулирование скорости ДПТ НВ с помощью
полууправляемого преобразователя
В режиме непрерывного тока механические характеристики рассчитываются по средним значениям тока и напряжения двигателя. В режиме прерывистого тока расчеты становятся громоздкими. Затруд-няется нахождение среднего значения напряжения якоря UЯ, поскольку фазовый угол β зависит от средних значений скорости и тока якоря IЯ, а также угла управления α. В ряде случаев справедливо допущение о непрерывности токов, поэтому расчеты могут быть ограничены рас-смотрением только зоны непрерывных токов.
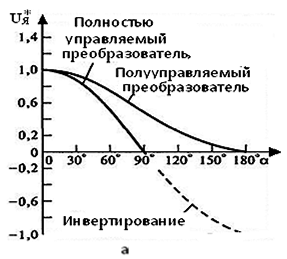
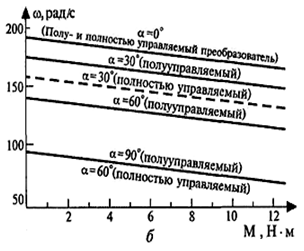
Рис. 6.10. Характеристики преобразователя и двигателя в режиме
непрерывного тока
Вывод: Введение дополнительной индуктивности в якорную цепь сужает зону прерывистых токов и увеличивает жесткость механичес-ких характеристик в широкой области изменения момента.
Пример 6.2.1. Регулирование скорости ДПТ НВ производится по схеме рис. 6.9. Данные двигателя: РНОМ = 7,5кВт; UНОМ = 230В;  = 126 рад/с; IЯНОМ = 38А; RЯ = 0,ЗОм, постоянная двигателя сФ = 1,74В с. Напряжение питания 260 В. Индуктивность якорной цепи достаточна для обеспечения непрерывности тока якоря и отсутствия пульсаций.
= 126 рад/с; IЯНОМ = 38А; RЯ = 0,ЗОм, постоянная двигателя сФ = 1,74В с. Напряжение питания 260 В. Индуктивность якорной цепи достаточна для обеспечения непрерывности тока якоря и отсутствия пульсаций.
В режиме выпрямления (двигательном режиме) для угла управления а = 30° и номинального тока якоря необходимо рассчитать: момент и скорость двигателя, а также коэффициент мощности.
В режиме инвертирования (рекуперативного торможения) поляр-ность ЭДС двигателя изменяется на противоположную, например, путем реверса потока возбуждения. Для этого режима требуется найти угол управления, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.
Решение
1. Режим выпрямления. Определяем момент двигателя по
 .
.
Напряжение на якоре определяется по формуле (6.12):

Для якорной цепи определяем ЕЯ:
 .
.
Находим угловую скорость:

Угловую скорость можно также определитьпо формуле

Если ток якоря не имеет пульсаций и постоянен, то ток, потреб-ляемый из сети, имеет прямоугольную форму и амплитуду 38 А.
Среднеквадратичное значение тока сети
I=38 A.
Мощность, отдаваемая сетью (полная мощность):
 .
.
Если пренебречь потерями в преобразователе, то мощность якорной цепи двигателя

Отсюда коэффициент мощности имеет следующее значение:
2. Режим инвертирования (рекуперативного торможения).
В момент изменения полярности ЭДС:
Из уравнения для якорной цепи находим

Мощность, преобразуемая двигателем:

 .
.
Потери мощности в сопротивлениях якоря:

Мощность, поступающая в сеть, равна разности этих значений:

или
 .
.
|
|
Дата добавления: 2014-11-29; Просмотров: 893; Нарушение авторских прав?; Мы поможем в написании вашей работы!