КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Переходные режимы электроприводов
|
|
|
|
Одной из задач динамики ЭП является задача анализа переходных режимов приводов с АД, которая без учёта электромагнитных пере-ходных процессов решается на основе следующих уравнений (8.5.1 – 8.5.4):

(8.5.1)
(8.5.2)
(8.5.3)
(8.5.4)
где  – соответственно синхронная угловая скорость и угловая скорость ротора (вала) двигателя; J – приведённый к валу двигателя сум-марный момент инерции вращающихся и поступательно движущихся частей привода;
– соответственно синхронная угловая скорость и угловая скорость ротора (вала) двигателя; J – приведённый к валу двигателя сум-марный момент инерции вращающихся и поступательно движущихся частей привода;  – момент двигателя;
– момент двигателя;  – момент сопротивления, создаваемый рабочей машиной, в общем случае может зависеть от угла поворота вала двигателя
– момент сопротивления, создаваемый рабочей машиной, в общем случае может зависеть от угла поворота вала двигателя  и его угловой скорости
и его угловой скорости  как (12);
как (12);  – скольжение двигателя и его критическое значение соответственно;
– скольжение двигателя и его критическое значение соответственно;  – критический момент двигателя; Q – константа, зависящая от критическо-го скольжения, кратности критического и пускового момента двигателя.
– критический момент двигателя; Q – константа, зависящая от критическо-го скольжения, кратности критического и пускового момента двигателя.
Аналитически (посредством интегрирования дифференциального уравнения (8.5.4)) система уравнений (8.5.1 – 8.5.4), решается только для
= сonst или = 0. Во всех остальных случаях для её решения ис-пользуют приближённые графоаналитические методы.
Рассматриваемая задача может быть сравнительно просто решена на основе метода структурного моделирования. Покажем это на примере решения задачи, содержание которой следующее.
Для ЭП вентилятора с двигателем типа 4А80В2УЗ имеющего характеритики:
JДВ = 0,002кг∙м2, SКР = 0,38, ω= 300,5 рад/с, ω0 = 314 рад/с, МКР = 19,03Нм, q= 2,22,
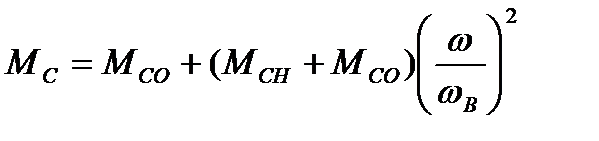
необходимо определить время пуска. Момент сопротивления вентиля-тора
где  – начальный момент сопротивления вентилятора;
– начальный момент сопротивления вентилятора;
 – момент сопротивления вентилятора при номинальной угловой скорости
– момент сопротивления вентилятора при номинальной угловой скорости  Момент инерции вентилятора J=0,06
Момент инерции вентилятора J=0,06  , а суммарный момент инерции
, а суммарный момент инерции 
|
|
|
Структурная схема соответствующая системе уравнений (8.5.1 – 8.5.4) после записи как

 ,
,
будет иметь вид показанный на рис.8.5.1.
График переходного процесса при пуске вентилятора, полученный в результате моделирования на основе структурной схемы рис. 8.5.2, соответствующей структурной модели рис. 8.5.3 приведён на рис. 8.5.4. Анализ результатов показывает, что длительность пуска рассматри-ваемой электромеханической системы (АД – вентилятор) составляет tП = 0.32 (данное значение tП взято из числовых результатов расчёта).
|
|
|
| + |

|
|
|
| ω |
| ω |
| ω |
Рис. 8.5.1. Структурная схема модели ЭП с АД
Точность расчёта на основе структурной модели на 20% выше, чем точность результата, полученного графоаналитическим методом ( ).
).
Метод структурного моделирования позволяет получать не только графики переходных процессов, но и при необходимости, используя блок фиксации данных «Фазовая плоскость», строить фазовые портреты по любым двум переменным величинам. Для рассматриваемой задачи в результате моделирования можно получить механические характеристи-ки, соответствующие уравнениям (8.5.2 – 8.5.4) рис. 8.5.3.
Построение модели для электропривода вентилятора с двигателем типа 4А80В2У3. Воспользуемся ПП “Mathlab” приложением Simulink.
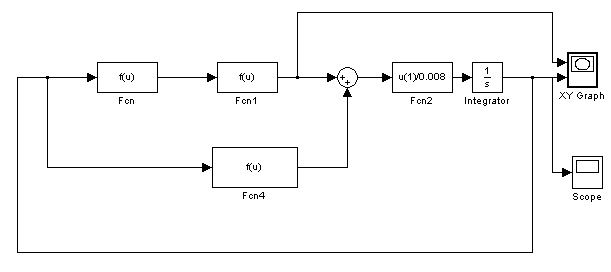 Рис. 8.5.2. Структурная схема модели ЭП вентилятора
Рис. 8.5.2. Структурная схема модели ЭП вентилятора
в приложении Simulink
1.Блоки вычисления Fcn, Fcn1, Fcn4 по формулам (8.5.2 – 8.5.4) строим, используя User-DefinedFunctions/Fcn.
2.Блоки вычисления Fcn2, строим, используя User-Defined Functions / Fcn.
3. Блоки вычисления, приведённые в пункте 1, соединяем с помо-щью сумматора, взятого из Math Operations/Sum.
4. Сумматор и интегратор, взятый из Countinuous/Integrator, сое-диняем между собой, используя блок вычисления, приведённый в п. 2.
5. Строим зависимость W = f(МДВ), используя блок Sinks/XYGraph.
6. Строим зависимость W = f(t), используя блок Sinks/scope.
Вычисления:
|
|
|
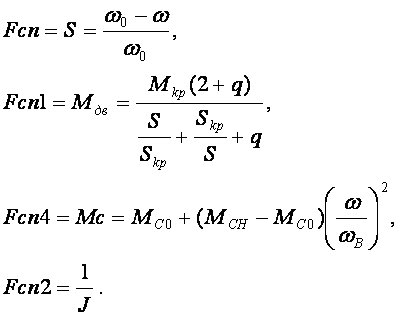
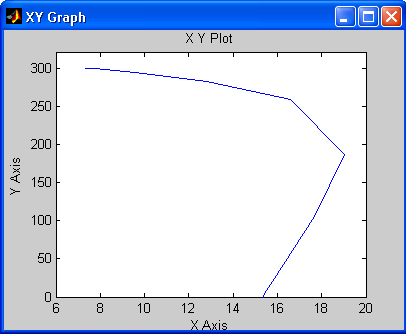
Рис. 8.5.3. Механическая характеристика электродвигателя
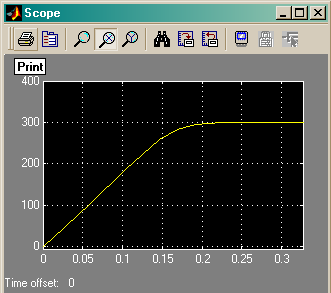
Рис. 8.5.4. График переходного процесса пуска вентилятора
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1369; Нарушение авторских прав?; Мы поможем в написании вашей работы!