КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Импульсное регулирование скорости АД
|
|
|
|
Пуск и регулирование скорости АД с фазным ротором может осуществляться включением в каждую фазу ротора реостатов с сопро-тивлениями Ra. В этом случае плавное регулирование скорости отсутс-твует: переход с характеристики на характеристику при пуске (рис.8.6), торможении или при изменении скорости сопровождается скачками тока и момента. При этом способе управления двигателем плавность пуска и регулирования скорости обеспечивается только за счет увели-чения числа пусковых ступеней. Это вынуждает использовать громоз-дкие релейно-контакторные схемы с большим числом коммутирующих аппаратов. Ограниченным является также и диапазон регулирования скорости, так как жесткость характеристик при реостатном регули-ровании существенно снижается.
Указанные недостатки отсутствуют в системах, где использовано импульсное управление сопротивлением роторных резисторов.
Схема импульсного регулирования добавочного сопротивления в роторной цепи АД приведена на рис. 8.16,а.
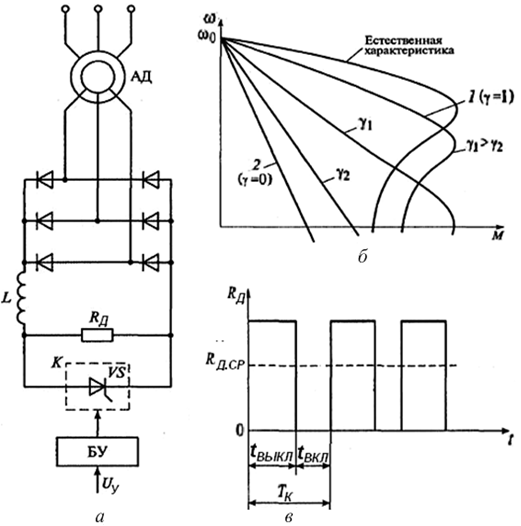
Рис.8.16. Импульсное регулирование добавочного сопротивления в цепи ротора АД, 1 – -естественная;2 – искусственная характеристика.
Дополнительное сопротивление Rдвключено в роторную цепь через неуправляемый выпрямитель. Для уменьшения пульсаций выпрямлен-ного тока последовательно с сопротивлением включается реактор L. Параллельно сопротивлению включается управляемый ключ (комму-татор) К. Основным элементом ключа является тиристор VS. Управле-ние ключом осуществляется с помощью блока управления БУ, который производит включение и выключение тиристора VS. При подаче сигнала управления на тиристор, он открывается и замыкает накоротко сопро-тивление RД. При сопротивлении RД = 0 двигатель работает на характе-ристике 1 (рис. 8.16,б), близкой к естественной. Различие в характе-ристиках объясняется дополнительным падением напряжения в роторной цепи за счет наличия выпрямителя и управляемого ключа.
|
|
|
Если тиристор закрыт, то двигатель будет работать на искусствен-ной характеристике 2, соответствующей случаю включения в каждую фазу ротора добавочного сопротивления.
Рассмотрим случай периодического включения и отключения тирис-тора. Коммутация ключа К обычно осуществляется таким образом, что период коммутации ТК остается неизменным, а изменяется лишь соот-ношение времени выключенного tВЫКЛ и включенного tВКЛ состояний тиристора Т. При этом сопротивление резистора RД изменяется в соот-ветствии с диаграммой рис. 8.18,в. Такое изменение сопротивления RД во времени эквивалентно тому, что в роторную цепь включен добавоч-ный резистор, сопротивление которого равно среднему значению сопротивления RД за период ТкТК где у = tBKJI/TK – —относительное время включенного состояния ключа при его коммутации, называемое также скважностью коммутации.
Таким образом, изменяя у, можно изменять эквивалентное добавоч-ное сопротивление в цепи от нуля при у = 1, или tBKJl = ТК до Ra при у = 0, или tBKlltBK = 0. Это позволяет получить семейство механических характе-ристик асинхронного ЭП при разных значениях скважности у, которые располагаются между граничными характеристиками 1 и 2, соответс-твующими у = 1 и у = 0О (см. рис. 8.16,б).
Основные преимущества импульсного метода управления асинхронным электродвигателем — это простота реализации, малая мощность управления
тиристорным коммутатором, плавное бесступенчатое регулированиескорости, возможность введения отрицательных обратных связей по скорости электродвигателя и выпрямленному току, что позволяет формировать требуемые механические характеристики.
|
|
|
Основные преимущества импульсного метода управления асинхрон-ным электродвигателем – это простота реализации, малая мощность уп-равления тиристорным коммутатором, плавное бесступенчатое регули-рование скорости, возможность введения ООС по скорости электро-двигателя и выпрямленному току, что позволяет формировать требу-емые механические характеристики.
Недостатком импульсного регулирования сопротивления, также, как и ступенчатого, является увеличение потерь энергии в электрод-вигателе по мере снижения скорости. Поэтому рассмотренный способ регулирования рекомендуется применять в ЭП тех механизмов, где необходим плавный пуск, а также регулирование скорости в малых пределах. К таким механизмам относятся, например, конвейерные ус0-тановки.
Необходимо отметить, что энергетические показатели при импульс-ном регулировании сопротивления несколько хуже, чем при ступенча-том. Это объясняется тем, что при периодическом включении и отклю-чении добавочного сопротивления возникают колебания токов электро-двигателя, что приводит к увеличению его нагрева; включение выпря-мителя приводит к искажению формы токов электродвигателя, высшие гармоники которых дополнительно нагревают электродвигатель.
Импульсное регулирование асинхронных двигателей возможно и по цепи статора. Способ регулирования напряжения АД путем изме-нения интервалов проводимости тиристоров в течение каждого перио-да частоты сети. Можно использовать другой способ регулирования, заключающийся в изменении числа полных периодов, в течение ко-торых к двигателю подводится напряжение. В этом случае действу-ющее значение напряжения регулируется путем изменения отношения длительностей интервалов открытого и закрытого состояний тирис-торов.
Если эти интервалы невелики по сравнению с механической посто-янной системы, то пульсации угловой скорости двигателя будут незна-чительными. При импульсном управлении меньше искажается напря-жение сети и возникают меньшие радиопомехи, чем при фазовом управлении тиристорами. В то же время при импульсном управлении невозможно обеспечить плавное регулирование угловой скорости, а ее пульсации могут оказаться значительными, если механическая постоян-ная времени системы мала.
|
|
|
Пример 8.3. Трехфазный АД с фазным ротором напряжением Uл -= 380В, частотой 50 Гц включен по схеме регулирования, приведенной на рис.8.16,а. Двигатель имеет следующие параметры: r1 = 0,041 Ом; r2’= 0,044 Ом; х1 = 0,29 Ом; х2' = 0,44 Ом; х12 = 6,1 Ом.
Отношение чисел витков фаз обмоток ротора к статорным К =  = 0,9.
= 0,9.
Индуктивность Ld велика, поэтому выпрямленный ток Id имеет пре-небрежимо малые пульсации. Параметры схемы замещения r1r2’, х1, и х2' малы по сравнению с индуктивностью Ld. Потерями XX в выпря-мителе, тиристорном ключе и индуктивности Ld пренебрегаем. Момент нагрузки, который пропорционален квадрату скорости, М = 750 Н·м при частоте вращения п = 910 мин-1. Необходимо:
1.определить сопротивле-ние Ra, при котором двигатель работал бы с минимальной частотой вращения п = - 620 мин-1; с полученным значением Ra при требуемой частоте вращения 810 мин-1 рассчитать: ток Id через индуктивность; скважность ключа у; напряжение постоянного тока Ud, КПД, коэффи-циент мощности (cosφ) системы.
Решение.
Напомним, что  .
.
Напряжение на роторе:

Для трехфазного выпрямителя
 (8.6)
(8.6)
Если Ps— – мощность скольжения, то электромагнитная мощность

а механическая мощность

Так как суммарная мощность скольженияи

тогда
 , (8.7)
, (8.7)

Подставив (7.6) в (7.7), получим
 . (8.8)
. (8.8)
Последнее выражение показывает, что ток в индуктивности не зависит от скорости

откуда
Скорость может быть получена в виде

Варьируя у от 0 до 1, можно изменять скорость от минимальной до ωw
При частоте вращения 620 мин-1:
Соответствующий ток в индуктивности

Скорость будет минимальной, когда у = 0.
Из уравнения (7.9) получим

Этой скорости соответствует Rд = 2,24 Ом.
2. При частоте вращения 810 мин-1:

Подставив это значение в уравнение (8.9), получим

В этом случае у = 0,7.
Определим скольжение
Из уравнения (8.6)

Определим мощность потерь

Выходная мощность

Действующее значение тока ротора, приведенное к статору:

Электрические потери в роторе

потери Потери в статоре

Потребляемая мощность
|
|
|


Первая гармоника тока ротора, приведенная к числу витков статора, определяется зависимостью

Действующее значение намагничивающего тока

Действующее значение первой гармоники потребляемого тока

Для расчета коэффициента мощности определим угол φ:

Коэффициент мощности при этом: cos φ = cos(-21°) = 0,93 (отстающий).
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 6746; Нарушение авторских прав?; Мы поможем в написании вашей работы!