КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электропривод с шаговым двигателем
|
|
|
|
Исполнительные органы некоторых рабочих машин и механизмов должны совершать строго дозированные перемещения с фиксацией своего положения в конце движения. В ЭП таких машин и механизмов применяются шаговые двигатели (ШД), образующие основу дискретного ЭП. Дискретный ЭП используется для металлообрабатывающих станков с числовым программным управлением (ЧПУ), роботов и манипуляторов, в гибком автоматизированном производстве, электронной и часовой промышленности, газорезательных и сварочных автоматах, приборах вре-мени, нажимных устройствах прокатных станов, лентопротяжных и регис-трирующих устройствах, в медицинской технике, в производстве элемен-тов микроэлектроники и т.д. Дискретный ЭП естественным образом соче-тается с МПСУ, которые все шире применяются во всех отраслях техники.
ЭП с ШД используется с мощностью от долей ватта до нескольких киловатт, что определяется мощностью серийно выпускаемых ШД. Расширение шкалы мощности дискретного ЭП может быть достигнуто использованием в нем серийных АД, которые за счет соответствующего управления могут работать в шаговом режиме.Шаговый двигатель по принципу своего действия является СД. Однако в отличие от последнего, магнитное поле ШД перемещается (вращается) не непрерывно, а диск-ретно, шагами.Это достигается за счет импульсного возбуждения обмо-ток ШД с помощью электронного коммутатора, который преобразует одноканальную последовательность управляющих импульсов в мно-гофазную систему напряжений, прикладываемых к обмоткам (фазам) ШД.
Дискретному характеру напряжения на фазах ШД соответствует дискретное вращение (перемещение) электромагнитного поля в воздуш-ном зазоре, вследствие чего движение ротора состоит из последователь-ных элементарных поворотов, или шагов.
|
|
|
Угловое перемещение α ШД в общем случае определяется выражением а = 2π  (рп), где р – число пар полюсов ротора; n – число перек-лючений (тактов) в цикле, равное числу фаз ШД при симметричной и удвоенному числу фаз при несимметричной коммутации.
(рп), где р – число пар полюсов ротора; n – число перек-лючений (тактов) в цикле, равное числу фаз ШД при симметричной и удвоенному числу фаз при несимметричной коммутации.
Шаговое перемещение ротора соответствует последовательности управляющих импульсов, при этом каждому импульсу соответствует од-но переключение обмотки ШД (один такт коммутации) и один шаг рото-ра. Суммарный угол поворота ШД пропорционален числу импульсов, а его скорость – частоте коммутации обмоток fК: ω = αfК.
Для реверса ШД при симметричной схеме коммутации необходимо изменить полярность напряжения обмотки, которая была отключена на данном такте коммутации. Тогда ротор ШД совершит шаг в противопо-ложном направлении.
Основным режимом работы шагового привода является динамичес-кий. В отличие от обычного СД, ШД рассчитаны на вхождение в синхро-низм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом ЭП обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую. Пуск ШД осуществляется скачкообразным или постепенным увеличе-нием частоты входного сигнала от нуля до рабочей, торможение – сни-жением ее до нуля, а реверс – изменением последовательности коммута-ции обмоток ШД.
Обеспечение заданного характера переходных процессов является для ЭП с ШД основной и наиболее сложной задачей, так как вследствие электромагнитной инерции обмоток ШД, механической инерции его ротора и момента нагрузки на валу при резких изменениях частоты следования импульсов управления ротор ШД может не успеть отрабо-тать полностью все импульсы. Максимальная частота управляющих импульсов, при которой возможен пуск ШД из неподвижного состояния без выпадения из синхронизма (пропуска шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция ШД и больше момент его нагрузки, тем меньше частота приемистости.
|
|
|
Современные ШД различны по конструктивному исполнению. В зависимости от числа фаз и устройства магнитной системы ШД бывают одно-, двух- и многофазными с активным или пассивным ротором.
Развитие дискретного ЭП привело к созданию специальных видов ШД – линейных, волновых, с малоинерционным и катящимся роторами.
На базе цилиндрических линейных ШД созданы двухкоординатные линейно-поворотные ШД, суммирующие на своем валу два независимых движения: вращательное и поступательное.
Важным достижением в области дискретного ЭП является создание так называемых многокоординатных ЩД, осуществляющих перемещение исполнительных органов по трем координатам в пространстве. Двигатели такого рода, отличаясь высокой точностью позиционирования и скорос-тью, используются в приводах манипуляторов, роботов и автоматических линиях станков. Обобщенная функциональная схема регулируемого ЭП с ШД показана на рис. 12.2. Основная ее часть, обычно называемая разомк-нутой схемой, выделена штриховой линией.
Сигнал управления в виде импульсов напряжения поступает на вход блока 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работы последующих блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных импульсов, например, в четы-рехфазную систему однополярных импульсов напряжения, соответст-вующую числу фаз (обмоток) двигателя.
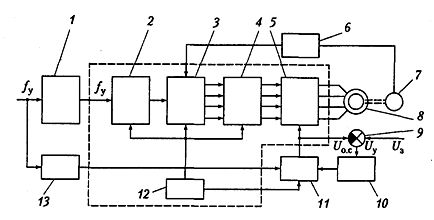 Рис. 12.2. Схема ЭП с шаговым двигателем
Рис. 12.2. Схема ЭП с шаговым двигателем
Импульсы с выхода распределителя 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника 12 постоян-ного тока (выпрямителя) и обеспечивает в обмотках ШД пульсирующий ток одного направления.
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамические свойства, точность и энергетические показатели ЭП. Поэтому современные схемы управления ШД содержат дополнительные узлы, с помощью которых характеристики ЭП улучша-ются. К таким узлам (рис.12.2) относятся частотно-импульсный регуля-тор напряжения 11, усилитель ОС по току 10, блок электронного дробле-ния шага 13, блок плавного разгона и торможения (задатчик интенсивно-сти) 1, датчик положения ротора и скорости 7 и цифровой регулятор 6.
|
|
|
Регулятор 11 и усилитель 10, связанные с узлом сравнения 9, служат для автоматической стабилизации тока в обмотках ШД и поддержания момента ШД, что существенно улучшает энергетические показатели его работы. Стабилизация тока осуществляется введением ООС по току, с помощью которой за счет регулирования частоты переключения регу-лятора 11 (частотно-импульсная модуляция) изменяется среднее значе-ние напряжения питания и тем самым регулируется ток в обмотках ШД.
Та же задача формирования тока в обмотках ШД решается при ис-пользовании коммутатора 5, обладающего свойствами источника тока. В этом случае отпадает надобность в ОС по току и блоках 10 и 11.
Для улучшения качества движения ШД при низких частотах и повышения точности отработки входных импульсов управления с помощью блока 13 уменьшается единичный шаг ШД.
Улучшение динамических свойств дискретного ШД, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приемистости ШД, может быть достигнуто введением в схему блока 1, обеспечивающего разгон и торможение ЩД с заданным темпом, при котором еще не происходит пропуска управ-ляющих импульсов. При использовании блока 1 область рабочих частот шагового ЭП может быть увеличена в 2–3 раза.
Возможности дискретного ЭП расширяются при создании замк-нутых схем управления, выполняемых с помощью датчика 7 и регулято-ра 6. В таком дискретном приводе информация о действительном поло-жении вала и скорости ШД поступает на вход цифрового регулятора 6, который обеспечивает заданный характер движения привода.
Перспективы дальнейшего развития ЭП с ШД связаны с использо-ванием микропроцессорных средств управления. В этом случае функции всех показанных на рис. 12.2 блоков управления, за исключением сило-вого коммутатора, датчиков скорости и положения, выполняет микроп-роцессор по соответствующей программе.
|
|
|
Схема вентильно-индукторного ЭП
Простота, технологичность и дешевизна индукторных электро-двигателей определили разработку и применение для ряда рабочих машин и механизмов так называемого вентильно-индукторного ЭП (ВИП). Такой ЭП характеризуется широкими регулировочными возмож-ностями и может иметь мощности от единиц до нескольких сотен кило-ватт и более.
Структурная схема силовой части ВИП в случае питания его от трехфазной сети переменного тока представлена на рис. 12.3,а. В ее состав входят индукторный двигатель ИД, электронный коммутатор К свыпрямителем В, датчик положения ДП ротора двигателя и система управления СУ ВИП. Особенность ВИП состоит в применении индук-торного двигателя с неодинаковым количеством полюсов статора и зуб-цов ротора, лежащим обычно в пределах 4 – 12. На рис. 12.3 в качестве примера показан трехфазный двигатель, имеющий 6 полюсов статора и 4 зубца на роторе. На полюсах статора ИД расположены четыре обмотки А-а, В-b, С-с, подключенные к электронному коммутатору, выпол-няемому обычно на силовых транзисторах того или иного типа. В схеме рис.12.3,а в качестве управляемых ключей коммутатора используются силовые биполярные транзисторы Т1–Т6 сизолированным затвором типа IGBT. Управление ключами осуществляет СУ, обеспечивающая подачу на них импульсов управления с необходимыми последовательностью и частотой, которые определяются сигналами задания скорости U з.с и датчика положения U д.п.
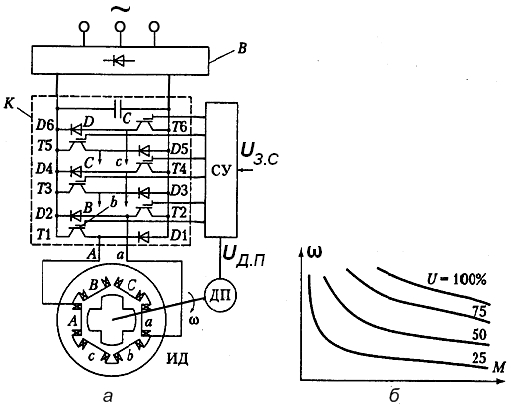
Рис.12.3. Схема (а) и характеристики (б)вентильно-индукторного ЭП
Принцип действия ВИП состоит в следующем. При подаче импульсов управления на пару транзисторов (ключей) одной фазы коммутатор подключает обмотку этой фазы двигателя к выходу выпря-мителя В. По обмотке начинает протекать ток, создающий в двигателе магнитное поле. Это магнитное поле вызовет появление электромаг-нитных сил притяжения между полюсами статора и ближайшими к ним зубцами ротора, которые создадут вращающий момент на валу двига-теля. Под его действием ротор переместится в согласованное положение, в котором оси возбужденных полюсов статора и ближайших к ним зубцов ротора будут совпадать.
Так как число полюсов статора и зубцов ротора различно, то в согласованном положении ротора для работающей фазы следующая фаза оказывается в рассогласованном положении и подготовлена к очередному подключению к источнику питания. Требуемая последова-тельность подключения фаз двигателя к источнику питания, при которой на его валу обеспечивается постоянное направление вращающего мо-мента, осуществляется с помощью находящегося на валу датчика поло-жения.
Скорость вращения ротора определяется следующей формулой:

где fk – частота коммутации обмоток; m – число фаз двигателя; n – число зубцов ротора.
Эта формула показывает возможности выполнения ВИП на различ-ные скорости. При высокой частоте коммутации обмоток могут быть ре-ализованы ИД на большие скорости вращения, а выполнение их с большим числом полюсов статора и зубцов ротора позволяет получить низкие скорости ВИП. При низких скоростях ИД из кинематической схемы ВИП могут быть исключены редукторы.
Механические характеристики в разомкнутой структуре ВИП при различных напряжениях питания U показаны на рис.12.3,б. При помощи различных обратных связей могут быть сформированы характеристики, обеспечивающие регулирование координат ЭП с требуемым качеством. В ВИП может быть реализован и тормозной режим работы, осущест-вляемый за счет выбора моментов включения и отключения обмоток двигателя.
Показанные на схеме рис. 12.3,а диоды D1 – D6 служат для обеспе-чения возможности циркуляции электромагнитной мощности в ЭП при отключении силовых транзисторов, а конденсатор С играет роль фильт-ра на выходе выпрямителя.
В современных схемах ВИП широко используются микропроцес-сорные средства управления. При их использовании в ряде случаев ока-зывается возможным отказаться от применения в ЭП датчика положения, а необходимую для его работы информацию о положении ротора полу-чить косвенным путем. Это позволяет упростить кинематическую схему ВИП и сделать его тем самым более простым и надежным.
Схема автоматического регулирования тока возбуждения синхронного двигателя.
Синхронные двигатели (СД) за счет регулирования своего тока возбуждения могут изменять уровень циркулирующей между ним и сетью реактивной мощности, работая, в частности, как компенсаторы реактивной мощности. Кроме этого, с помощью регулирования тока возбуждения можно снижать потери энергии в двигателе и элементах системы электроснабжения, поддерживать напряжение питающей сети или коэффициент мощности СД. Такие схемы получили название схем автоматического регулирования возбуждения (АРВ).
На рис. 12.4 в качестве примера приведена схема АРВ СД. Она построена по принципу подчиненного регулирования координат и обес-печивает регулирование трех переменных: тока возбуждения, напряже-ния двигателя и реактивной составляющей тока статора СД.
Первый и второй контуры обеспечивают регулирование тока воз-буждения с помощью регулятора возбуждения РТВ. Сигнал на входе РТВ формируется из сигналов задания тока возбуждения, поступающего с регулятора задания тока возбуждения РЗТВ, текущего значения тока возбуждения Iв, поступающего с датчика тока возбуждения ДТВ, и уставки минимального тока Iв min. Выходной сигнал РТВ с помощью СИФУ воздействует на тиристорный возбудитель ТВ, который и обеспе-чивает требуемое регулирование Iв.
На вход РЗТВ (второй контур регулирования) поступают сигналы, пропорциональные квадрату активной составляющей тока статора Iа (канал: квадратичный преобразователь ПК – формирующий усилитель УФ), производной активного тока (канал: датчик активного тока ДАТ –дифференциальный преобразователь ДП) и реактивной составляющей тока с регулятора реактивного тока РРТ. Регулятор РРТ входит в третий контур – регулирования реактивной составляющей тока Iр. На его входе суммируются сигналы ОС по реактивной составляющей тока (датчик реактивного тока ДРТ) и два сигнала задания – от регулятора напряжения РH и сигнала задания уровня реактивного тока Iз.р.
На входе РН (четвертый контур регулирования) суммируются сигна-лы ОС по напряжению U1, (датчик напряжения ДН) и два задающих сигнала – номинального Uз.ном и минимального Uз.min напряжений. Кон-тур регулирования напряжения обеспечивает также форсировку возбуж-дения СД при снижении напряжения в питающей сети до 0,8 – 0,85 номинального за счет наличия в схеме специального узла форсировки возбуждения.
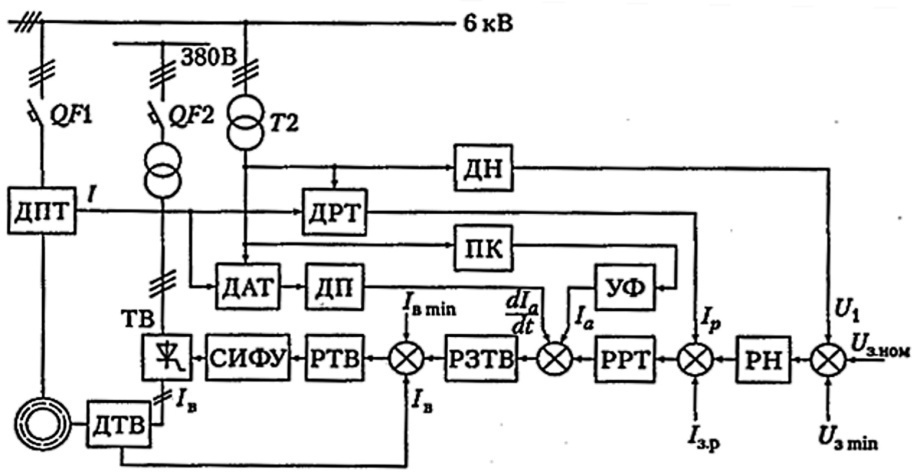
Рис.12.4. Замкнутая схема автоматического регулирования тока возбуждения синхронного двигателя
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2481; Нарушение авторских прав?; Мы поможем в написании вашей работы!