КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Следящий ЭП постоянного тока релейного действия
|
|
|
|
В этой схеме ЭП (рис.13.2) используется ДПТ последовательного возбуждения М, имеющий две обмотки возбуждения ОВ1 и ОВ2. Управление двигателем осуществляется с помощью силовых транзисто-ров VT1 и VT2. Каждый из транзисторов работает при определенной полярности сигнала согласования U∆, обеспечивая одно из направлений вращения двигателя. Если открыт транзистор VT1, ток проходит по ОВ2 и двигатель вращается в одном направлении, если же открыт транзистор VT2, ток проходит по ОВ1 и он вращается в другом направлении. Нап-равление тока якоря в обоих случаях остается неизменным. Разрядные диоды VD3 и VD4 служат для снятия перенапряжений, возникающих при отключении обладающих значительной индуктивностью обмоток возбуждения и якоря.
В следящем ЭП в качестве датчиков входной и выходной величин используются кольцевые потенциометры П1 и П2, которые образуют потенциометрический измеритель рассогласования. Движок потенцио-метра П1 (датчика входной величины) связан с выходным валом зада-ющего устройства ЗУ, который представляет собой в данном случае ре-дуктор с ручным приводом.
Движок потенциометра П2 (датчика выходной величины) связан с валом редуктора Р, расположенного на валу двигателя и рабочей машины РМ. Редукторы ЗУ и Р имеют одинаковое передаточное число. Питание потенциометров П1 и П2 осуществляется напряжением постоянного тока Un.
Сигнал рассогласования U∆' снимается с движков потенциометров П1 и П2. При их одинаковом угловом положении, что соответствует нулевому углу рассогласования ∆φ = φВХ – φВЫХ, сигнал U∆' = 0. При этом равен нулю и сигнал U∆ на выходе усилителя У, оба транзистора закрыты и двигатель неподвижен.
|
|
|
При возникновении рассогласования между угловыми положениями движков потенциометров П1 и П2, вызванного поворотом рукоятки ЗУ, сигналы U∆' и U∆ становятся отличными от нуля. В зависимости от полярности сигнала U∆`, которая определяется знаком угла рассогла-сования (ошибки) ∆φ, сигнал U∆ подается на транзистор VT1 (по цепи диод VD10 – стабилитрон VD5 – резистор R3 – диод VD7) или VT2 (по цепи диод VD9 – стабилитрон VD6 – резистор R4 – диод VD8). Если этот сигнал превышает порог срабатывания стабилитронов VD5 или VD6, то соответствующий транзистор откроется, подключая двигатель к источнику питания с напряжением U. Двигатель начнет вращаться, по-ворачивая вал рабочей машины РМ иось движка потенциометра П2 в направлении, при котором возникшее рассогласование в системе будет уменьшаться и стремиться к нулю. Когда сигнал U∆станет меньше напряжения открывания стабилитронов VD5 илиVD6, работающий транзистор (VT1 или VT2) закроется и отключит двигатель от источника питания.
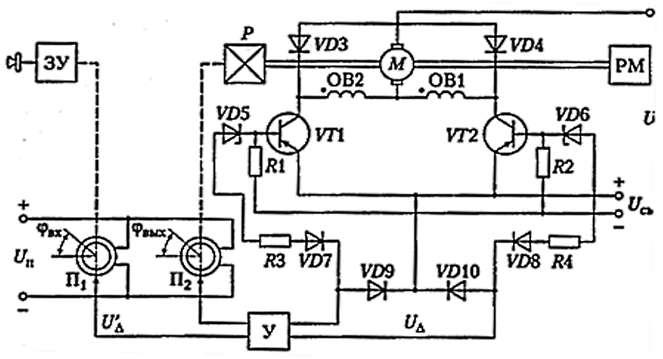
Рис.13.2. Схема следящего ЭП с двигателем постоянного тока
релейного действия

Рис.13.3. Схема следящего ЭП с асинхронным двигателем
Таким образом, ЭП в данной схеме отрабатывает заданное переме-щение φвх с некоторой погрешностью, обусловленной нечувствитель-ностью системы из-за порога срабатывания стабилитронов VD5, VD6. Зону нечувствительности системы стараются делать возможно меньшей в пределах 2...30 угла рассогласования. Однако снижение зоны нечувс-твительности может привести к возникновению нежелательного колеба-тельного режима работы ЭП около положения равновесия. Эффектив-ным средством устранения такого режима является введение в систему дополнительных сигналов по первой и второй производным сигнала рассогласования, а также использование электрического торможения после отключения двигателя.
Достоинствами следящих ЭП релейного принципа действия являют-ся их простота, надежность и возможность получения оптимальных траекторий движения исполнительных органов рабочих машин. К недостаткам таких систем следует отнести их склонность к колебаниям и наличие определенной нечувствительности (неточности) при слеже-нии.
|
|
|
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1495; Нарушение авторских прав?; Мы поможем в написании вашей работы!