КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Режимы работы и характеристики шаговых двигателей
| Установившийся режим вра-щения имеет место при постоян-ной частоте управляющих им-пульсов fу, причем время такта Tком коммутации превышает время переходного процесса t1(t1<Гком = 1/fу). Скорость вра-щения ротора при этом опреде-ляется выражением (14.2). Ха-рактеристики шагового ЭП (ШЭП) определяются системой нелинейных дифференциальных уравнений электрического рав-новесия по числу обмоток ШД и уравнением моментов (без учета | 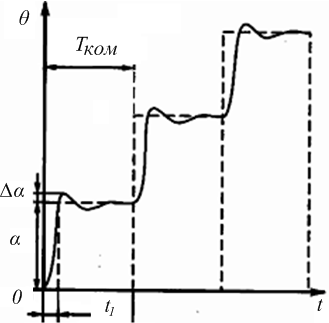
|
| демпфирования) | Рис.15.3. Отработка шагов ШД |
Режимы работы и характеристики ШД рассмотрим на примере двигателей вращательного типа, хотя основные соотношения справедли-вы также и для ЛШД (имея в виду эквивалентность момента и силы, а также угла поворота и линейного перемещения). Особенностью дискрет-ного ЭП с ШД является возможность длительной работы при частоте входных импульсов управления fу = 0.
Такой режим работы, получивший название статического, предус-матривает прохождение постоянного тока по обмоткам возбуждения, создающим неподвижное магнитное поле. Двигатель и система питания должны быть рассчитаны с учетом этого режима.
Старт-стопный режим (режим отработки единичных шагов) имеет место при такой частоте управляющих сигналов, при которой переход-ный процесс, вызванный управляющим импульсом, заканчивается к моменту поступления следующего импульса. Это означает, что ротор двигателя перемещается на один угловой шаг α и успевает затормозиться. Процесс сопровождается электромагнитными переход-ными процессами в обмотках ШД вследствие их подключения к источнику постоянного напряжения и электромеханическим переход-ным процессом вследствие воздействия электромагнитного момента на ротор двигателя. Движение ротора в конце шага характеризуется свободными колебаниями относительно положения устойчивого равно-весия (подобно колебанию маятника). Колебания затухают, когда вся кинетическая энергия ротора будет израсходована на электрические, магнитные и механические потери. Очевидно, что такие колебания являются нежелательными, поэтому разработаны различные приемы их гашения. Этот процесс отображен на рис.15.3.
 (15.1)
(15.1)
где ik – ток в к-й обмотке шаговых двигателей; Rk – активное сопротивление к-й обмотки;  – потокосцепление;
– потокосцепление;  – напряжение на к-й обмотке, зависящее в общем случае от тока; J – приведенный момент инерции ЭП; Мn(θ) – момент нагрузки, зависящий в общем случае от угла поворота θ;
– напряжение на к-й обмотке, зависящее в общем случае от тока; J – приведенный момент инерции ЭП; Мn(θ) – момент нагрузки, зависящий в общем случае от угла поворота θ;  – электромагнитный момент, зависящий от тока в обмотках и угла поворота ротора. В результате исследования системы (15.1), характери-зующегося большой трудоемкостью, определены условия, при которых обеспечивается устойчивая работа шагового ЭП (ШЭП). К ним относят-ся: введение внешнего демпфера; исключение режима холостого хода, являющегося самым тяжелым с точки зрения устойчивости; увеличение числа тактов коммутации. Дискретный ЭП устойчив, если
– электромагнитный момент, зависящий от тока в обмотках и угла поворота ротора. В результате исследования системы (15.1), характери-зующегося большой трудоемкостью, определены условия, при которых обеспечивается устойчивая работа шагового ЭП (ШЭП). К ним относят-ся: введение внешнего демпфера; исключение режима холостого хода, являющегося самым тяжелым с точки зрения устойчивости; увеличение числа тактов коммутации. Дискретный ЭП устойчив, если
МН/МН MAX≥0.1; βω0/ М Н MAX≥0,1,
где β – коэффициент вязкого трения; ω0 – круговая частота собственных колебаний:
u0 = (IMAX Zn /J)1/2.
Статический режим работы определяется угловой статической ха-рактеристикой (рис.15,4), представляющей собой зависимость статичес-кого синхронизирующего момента Мс от угла рассогласования θ между полем статора и ротором. В дальнейшем угловые характеристики будем рассматривать для двухполюсного ШД (Zn = 1). В общем случае кривая статического синхронизирующего момента МC(θ) несинусоидальна.
При анализе ШЭП учитывается первая гармоническая составля-ющая
M= MCMAXsin(α-θ),
где α – угол поворота поля статора при коммутации фаз. Значение MCMAX зависит от геометрии магнитной системы и типа ШД, числа пар полюсов ротора и числа возбужденных фаз. При возбуждении одной или нескольких фаз ШД, согласно принятому способу коммутации обмоток, установившиеся в них токи определяют положение поля статора и рото-ра, при котором электромагнитный момент, возникающий в результате взаимодействия полей ротора и статора, уравновешивает моменты внешних сил (момент нагрузки МH). Такому положению ротора ШД при МH = 0 и состоянию поля статора, характеризующемуся кривой 1 на рис.15.4, соответствует точка 0. Отключение одной фазы ШД и включе-ние другой в результате такта коммутации изменяет состояние электро-магнитного поля статора, которое при этом (электромагнитными процес-сами в обмотках ШД при коммутации пренебрегаем) изображается кривой 2, сдвинутой относительно характеристики 1 на один шаг α = 2п/п. Угловые характеристики 1 и 2 позволяют определять значения моментов, действующих на ротор и вызывающих его переход из одного устойчивого состояния в другое. Так, при МH = 0 переход ротора из точки 0 в точку А описывается известным уравнением движения
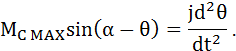
Если же на ротор действуют моменты внешних сил МH, то его устойчивое положение характеризуется углом нагрузки θH (см. рис.15.4). Положение ротора при этом определяется уравнением
 sin(α-θ) = MH,
sin(α-θ) = MH,
θн=arcsinMн/  .
.
Это угол отставания ротора от поля статора в результате действия нагрузки МH.
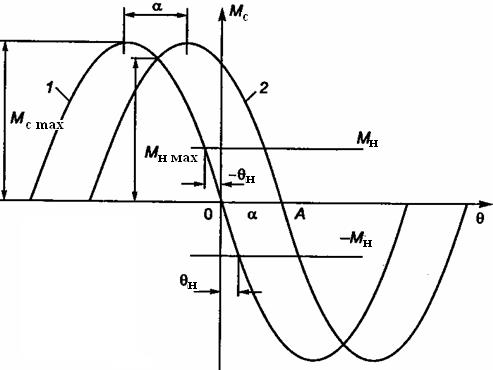
Рис.15.4. Статическая угловая характеристика ШД: 1 – исходное положение; 2– положение после одного такта коммутации
Нагрузочные свойства ШД при единичных переключениях фаз опре-деляются моментом МHMAX, который имеет место в точке пересечения угловых характеристик 1 и 2, соответствующих смежным комбинациям включенных фаз. Из рис. 15.4, очевидно, что при очередной коммутации двигатель отработает шаг при выполнении условия МH<М. Последний можно определить из выражения

Величина МHMAX быстро приближается к МCMAX при увеличении числа тактов коммутации п. Так, при п = 16 (несимметричная коммутация (1) – (12) – (2) –... ШД с числом фаз т = 8) обеспечивается МHMAX = 0,98 МCMAX, что является практически предельным значением. Дальнейшее увеличение числа п не приводит к повышению нагрузочной способности ШД. Для обеспечения перегрузки и устойчивого движения при колебаниях момента нагрузки Мн необходимо выполнение условия
MH<0,5 MHMAX ≤(0,3…0,4)MC. (15.2)
Механические характеристики ω(М) шагового ЭП при частотном ре-гулировании скорости являются абсолютно жесткими (штриховые линии на рис.15.5). Скорость ШД не зависит от момента на валу при выполнении условия нормального нагружения (15.2) и определяется согласно (14.2).
Предельная нагрузочная характеристика – зависимость максималь-ного нагружающего момента МHMAX от частоты управляющих импульсов fу – зависит от способа регулирования (форсировки, что будет пояснено ниже) напряжения в функции fу и фактически определяет диапазон рабочих частот и нагрузочную способность ШЭП. При работе с неизменным значением фазного напряжения (без форсировки) по мере увеличения частоты управления fу ток в обмотках ШД не достигает установившегося значения, что приводит к снижению момента. Для сохранения работоспособности ШЭП в таком режиме необходимо снижать момент нагрузки Мн

|
| Рис.15.5. Механические (штриховые линии) и нагрузочные характеристики шагового ЭП:1 – форсированное управление; 2 – управление при пос-тоянном напряжении фазы; 3 – момент при прерывистом характере движения |
Допустимый момент нагрузки в зависимости от частот управляющих импульсов определяется по предельной нагрузочной характеристике, пример-ный вид которой показан на рис. 15.5. (кривая 2).
Максимальная допустимая стати-ческая нагрузка МCMAX определяется пусковым моментом МПУСК при fy = 0.Регулирование напряжения в ШЭП имеет свои особенности и осущест-вляется путем импульсного форсиро-вания (в отличие от непрерывного изменения напряжения для ЭП постоян-ного тока и частотных ЭП с АД), т.е. кратковременной подачи на фазу ШД импульса повышенного напряжения с ограничением длительности импульса форсирования в функции времени либо тока.
Другой путь – включение в фазы форсировочных резисторов – в нас-тоящее время из-за низкого КПД все чаще заменяется импульсным форси-рованием. Все способы форсирования обеспечивают близкий к линейному закон изменения фазного напряжения
Uф=U0+kfy, (15.3)
где U0 – начальное значение напряжения при fy = 0; к – коэффициент, зависящий от параметров схемы замещения ШД и от напряжения форси-ровки.
Учитывая предельную нагрузочную характеристику, можно выде-лить две зоны регулирования (рис.15.5): 1) зона низких скоростей, соот-ветствующая регулированию с постоянным моментом М = const; 2) зона высоких скоростей, соответствующая регулированию с постоянной мощ-ностью Р = А/ω = const. Граничное значение скорости ω разделяет пере-ход от регулирования напряжения в функции частоты к режиму работы с постоянным напряжением.
При соблюдении закона (15.3) предельный момент нагрузки ШД МHMAX изменяется незначительно. Спад предельной нагрузочной харак-теристики в области низких частот, имеющий место из-за прерывистого характера движения (кривая 3 на рис.15.5), может быть преодолен путем электрического дробления шага. С повышением частоты fy необходимая длительность импульса форсирования превышает интервал включенного состояния фазы, поэтому схема управления обеспечивает по существу переключение ШД с низкого напряжения на повышенное, которое явля-ется предельным для данной схемы. Другими словами, имеет место час-тотное регулирование.
Таким образом, основными параметрами в аппроксимирующей характеристике являются значения момента МHMAX, которые определя-ются по выражению (15.2), и граничные значения скорости ω, зависящие от параметров схемы управления, основным из которых является напря-жение форсировки.
Изменение частоты управляющих импульсов fy, при программном управлении, ею может производиться по экспоненциальному или линей-ному закону в соответствии с рис.15.6, где fy1…fy4 – максимальные час-тоты fy; tp4…tp1 – время нарастания соответствующего значения частоты; tr1…tr4 – время начала торможения. На рис.15.6,а ШД работает в режиме «больших» перемещений, когда имеет место установившееся значение fy.
Такому режиму соответствует лишь одна из характеристик на рис. 15.6, (fy1). Остальные характеристики представляют режим отработки «малых» перемещений, при котором установившееся значение fy отсут-ствует, а время окончания разгона и время начала торможения совпа-дают. Разгон может производиться с некоторого начального значения частоты f0 (рис. 15.6,б),не превышающего частоты приемистости.
С точки зрения программной реализации управления средствами микропроцессорной техники, предпочтение следует отдать управлению по линейному закону (рис. 15.6,б).Шаговый ЭП (ШЭП), называемый также дискретным, можно отнести к классу частотно-регулируемых ЭП, регулирование скорости которых в общем случае требует изменения двух параметров – частоты и фазных напряжений.
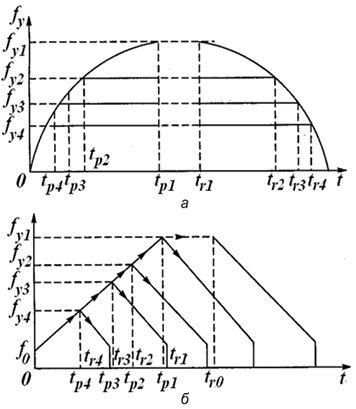
Рис.15.6. Характеристики программного разгона и торможения ШД:
а – при экспоненциальном законе изменения частоты управляющих импульсов;б – при линейном законе
ШЭП приближается по своим свойствам к непрерывнымЭП постоянного и переменного тока, отличаясь от них возможностью отработки заданной координаты (угла поворота) без датчика ОС по этому параметру, что очень важно. Системы управления ШЭП выпол-няются с большим числом дискретных компонентов, а в некоторых случаях – полностью на дискретных компонентах, что делает чрезвычайно удобным прямое цифровое управление такими ЭП от ЭВМ. Это обусловило их широкое применение в металлообрабатывающем оборудовании с ЧПУ, робототехнических комплексах и непосредственно в ЭВМ. Для управления ШД применяются статические ПЧ, принцип функционирования которых отличается от тех, которые применяются в частотно-управляемом асинхронном ЭП. ШЭП управляется частотно-модулированной последовательностью импульсов, в которой частота следования импульсов управления пропорциональна средней скорости, а их число – углу поворота вала ротора. Как было отмечено в п.15.1., частота следования импульсов может меняться по произвольному закону (с учетом изложенных ограничений) в широком диапазоне, включающем и режим фиксации (fy = 0), когда ШД развивает статический синхрони-зирующий момент, сохраняя заданное угловое или линейное положение.
Основные функциональные узлы ШЭП приведены на рис. 15.7.
Последовательность управляющих импульсов вырабатывается гене-ратором импульсов (ГИ) с регулируемой частотой путем подачи управ-ляющего сигнала Uy. Указанная последовательность импульсов может поступать также непосредственно от ЭВМ либо иного цифрового задаю-щего устройства через преобразователь «код – частота». При необхо-димости сигналы с выхода ГИ калибруются по длительности и ампли-туде в формирователе импульсов ФИ и через ключ управления КУ пос-тупают на распределитель импульсов РИ.
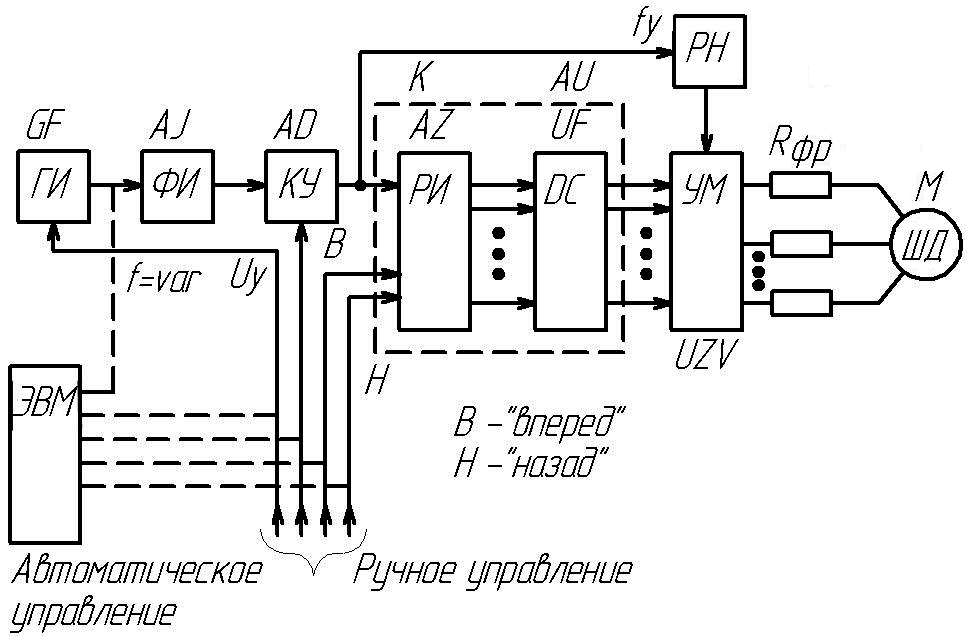
Рис. 15.7. Функциональная схема разомкнутого шагового ЭП
Задачей распределителя импульсов является формирование ди-фаз-ной последовательности прямоугольных напряжений, не всегда совпада-ющей с требуемым законом коммутации фаз ШД, которое обеспечивает-ся дешифратором DC. В некоторых схемах функции распределителя и дешифратора могут быть объединены в одном устройстве, которое назы-вается коммутатором (К). Регулятор напряжения, который имеется не во всех схемах, осуществляет импульсное регулирование напряжения на обмотках ШД при изменении частоты fy.
Распределитель импульсов может быть выполнен на различной элементной базе и иметь разнообразные схемные решения. В настоящее время для реализации РИ чаще всего применяются триггеры, сдвигаю-щие регистры и счетчики с дешифраторами.
Свойства ШЭП не зависят от того, на какой элементной базе выпол-нен РИ. Одним из главных требований, предъявляемых к РИ, является высокая помехоустойчивость, поскольку всякий сбой в системе управ-ления непременно сказывается на отработке заданного перемещения.
ШЭП с потенциальным управлением. В этом случае обмотки ШД подключаются к источнику питания неизменного напряжения. В таких схемах для уменьшения электромагнитной постоянной времени и расширения частотного диапазона скорости последовательно с обмоткой включается форсирующее сопротивление RФР (рис. 15.7). Недостатки такого решения очевидны: необходимость повышения напряжения источника питания и увеличение потерь, возникающих в RФР. В итоге включение RФР получило распространение в ШЭП небольшой мощности с невысокими требованиями к динамическим характеристикам.
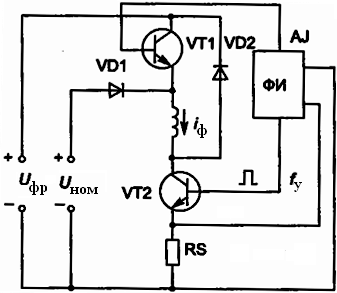
Рис. 15.8. Схема форсировки тока с двумя источниками напряжения (UФР, UHOM – соответственно форсированное и номинальное напряжение)
ШЭП с форсированным управлением. При вращении ротора индук-торно-реактивных ШД в результате изменения взаимной индуктивности между статором и ротором в обмотках фаз возникает генераторная ЭДС, увеличивающаяся по мере роста частоты вращения, что приводит к снижению тока и момента двигателя. Для сохранения же момента среднее значение силы тока статора необходимо поддерживать постоян-ным. С целью уменьшения влияния ЭДС вращения на характеристики ШЭП применяются различные способы форсировки нарастания и спада тока в обмотках фазы. Одно из возможных решений заключается в том, что для формирования тока фазы используют два источника: форсиро-ванного напряжения UФР и номинального напряжения UHOM(рис.15.8).
При поступлении управляющего импульса Iу открываются транзис-торы VT1 и VT2 и источник. Напряжение UФР в несколько раз превы-шает напряжение UHOM, чем обеспечивается быстрое нарастание тока.
При достижении током фазы Iф номинального значения по сигналу с измерительного сопротивления RS, формирователем импульсов ФИ транзистор VT1 запирается и ток Iф поддерживается на уровне номи-нального источником UH0M.
После снятия импульса Iу форсированный спад тока достигается благодаря встречному включению обмотки фазы на напряжение UФР, т.е. по цепи IФ – VD2 – RФР – UФР – UНОМ – IНОМ – VD1.
Стабилизация тока фазы возможна также путем применения широтно-импульсного регулятора.
|
|
Дата добавления: 2014-11-29; Просмотров: 1776; Нарушение авторских прав?; Мы поможем в написании вашей работы!