КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Функциональные схемы систем управления положением
|
|
|
|
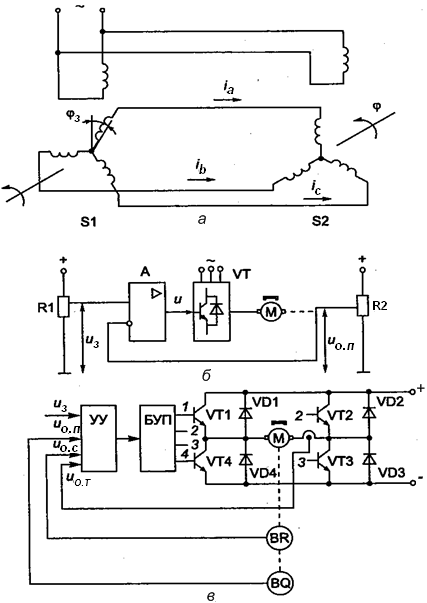
На рис.16.7,апоказана функциональная схема системы управления положением с применением сельсинной пары. Однофазные статорные обмотки сельсинов S1 и S2 подключены к источнику синусоидального напряжения. Магнитный поток вызывает в трехфазной обмотке ротора ЭДС, амплитудные значения которых зависят от угла поворота осей фазных обмоток относительно направления магнитного потока статора. Если углы поворота роторов сельсинов S1 и S2 одинаковы, то равные и встречно направленные ЭДС соединенных между собой фазных обмоток уравновешиваются,а токи в обмотках отсутствуют (iа = ib = ic = 0). Если углы поворота сельсинов S1 и S2 не совпадают, то в фазных обмотках возникает ток. Взаимодействуя с магнитным потоком статора, он созда-ет момент, поворачивающий ротор сельсина S2 в положение, совпада-ющее с положением ротора сельсина S1.
|
| Рис.16.7. Функциональные схемы системы управления положением. |
Сельсин S1 расположен на задающей оси, a S2 – на исполнительной. Поворачивая задающую ось на угол φ3, можно обеспечить поворот исполнительной оси на угол φ = φ3. Таким образом, исполнительная ось отслеживает положение задающей, благодаря чему осуществляется дис-танционная передача угла поворота.
Недостаток подобных систем заключается в их малой мощности (сотни ватт) и невысокой точности. Повышение точности и мощности исполнительного двигателя требует использования в системе современ-ного высокоточного датчика положения, питания двигателя от управ-ляемого преобразователя и применения управляющего устройства.
На рис.16.7,б показана функциональная схема системы управления положением на базе регулируемого ЭП с силовым полупроводниковым преобразователем. Здесь R1 – задающий потенциометр; А – сумми-рующий усилитель, на выходе которого формируется сигнал управления и = (из - ио.п), где р – коэффициент усиления усилителя А, ио.п – сигнал ОС, пропорциональный перемещению рабочего органа и снимаемый с потенциометра R2, VT – силовой полупроводниковый управляемый пре-образователь, М – двигатель. В подобных системах находят применение ЭП постоянного и переменного тока, допускающие широкий диапазон регулирования скорости благодаря управляемому преобразователю (преобразователь обязательно должен быть реверсивным).
|
|
|
Коэффициент усиления р выбирается из условий обеспечения заданной точности: чем меньше допустимое рассогласование, тем выше должен быть коэффициент усиления, что может привести к ухудшению динамических показателей и снижению запаса устойчивости. Для улучшения динамических свойств в системах управления положением применяются дополнительные ОС по скорости, ускорению или току двигателя. Функциональная схема такой системы с широтно-импуль-сным транзисторным преобразователем показана на рис.16.7, в.
Открытое состояние транзисторов VT1...VT3 соответствует направ-лению вращения «вперед», VT2...VT4 – «назад», VD1...VD4 – возв-ратные диоды, необходимые для обеспечения прохождения тока при запертом состоянии ключей, БУП – блок управления преобразователем, УУ – устройство управления, формирующее сигнал управления и в зависимости от задающего сигнала и обратных связей по положению ио.п., скорости ио.с, току ио.т.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 968; Нарушение авторских прав?; Мы поможем в написании вашей работы!