КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движение звена в плоскости
Поступательное движение звена характеризуется равенством линейных перемещений, скоростей и ускорений всех его точек в любой момент времени
|
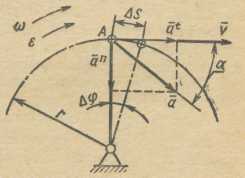
Вращательное движение звена характеризуется равенством угловых перемещений  , угловых скоростей
, угловых скоростей  и угловых ускорений
и угловых ускорений  всех его точек в любой момент времени.
всех его точек в любой момент времени.
Рис. 11.1.Вращательное движение звена
- средняя угловая скорость  ;
;
- угловая скорость в момент 
 , при равномерном вращении
, при равномерном вращении  ;
;
- угловое ускорение в момент  ;
;
- окружное (линейное) перемещение точки  ;
;
- окружная скорость в момент  ;
;
- тангенциальное ускорение в момент  ;
;
- нормальное ускорение  ;
;
- полное ускорение  ,
,  .
.
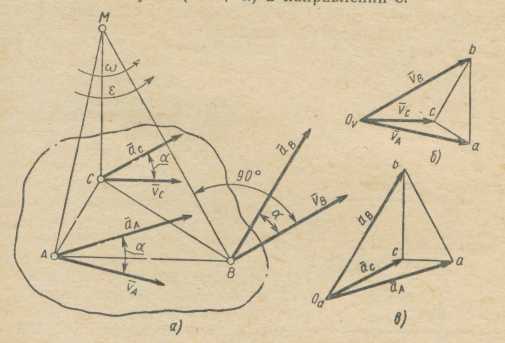
Построение планов скоростей и ускорений звена. Сложное плоское движение звена в каждый момент времени приводится к его вращению вокруг мгновенного центра вращения скоростей М (рис.11.2 а) с мгновенной угловой скоростью  и мгновенным угловым ускорением
и мгновенным угловым ускорением  .
.
Векторы линейных скоростей и ускорений определяются графически построением плана скоростей и плана ускорений.
На плане скоростей звена (рис.11.2 б) векторы абсолютных скоростей всех точек  проводятся из общего полюса
проводятся из общего полюса  . Прямые, которые соединяют концы этих векторов, являются векторами относительных скоростей
. Прямые, которые соединяют концы этих векторов, являются векторами относительных скоростей  - скорость точки В относительно А и т.д.
- скорость точки В относительно А и т.д.  на плане скоростей подобен
на плане скоростей подобен  на изображении звена сходственно с ним расположен (обход против часовой стрелки) и повернут относительно него на 900 в направлении
на изображении звена сходственно с ним расположен (обход против часовой стрелки) и повернут относительно него на 900 в направлении  .
.
На плане ускорений звена (рис.11.2 в) векторы абсолютных ускорений всех точек  проведены из общего полюса
проведены из общего полюса  . Прямые, соединяющие концы этих векторов, являются векторами относительных ускорений
. Прямые, соединяющие концы этих векторов, являются векторами относительных ускорений  - ускорение точки В относительно А и т.д.
- ускорение точки В относительно А и т.д.  на плане ускорений подобен
на плане ускорений подобен  и повернут на угол
и повернут на угол  в направлении
в направлении  .
.
|
Рис.11.2.План скоростей и план ускорений для звена
а) – звено, б) план скоростей, в) – план ускорений
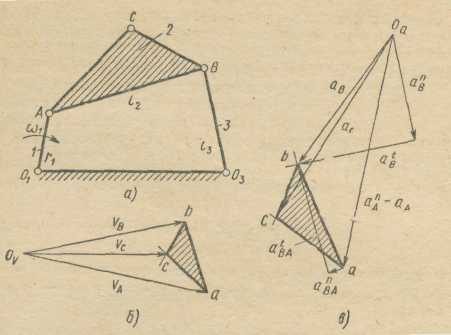
Построение планов скоростей для механизмов. Планом скоростей для механизма называется векторный граф, состоящий из совмещенных планов скоростей всех его звеньев, построенных из одного полюса и в одинаковых масштабах.
При построении планов скоростей используются следующие приемы:
|
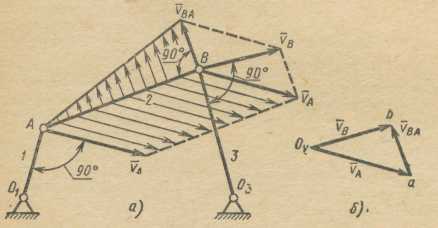
- разложение сложного плоского движения звеньев на переносное (обычно поступательное) движение с известной скоростью какой-либо точки звена и на относительное (обычно вращательное) движение звена вокруг этой точки (рис.11.3.)
Рис. 11.3.Построение плана скоростей для звена 2
а) – схема разложения сложного движения звена 2 на переносное и относительное, б) план скоростей для звена 2
Абсолютная скорость точки В  .
.
Для построения планов скоростей составляют векторные уравнения, в которых подчеркивают двумя линиями известные по величине и направлению векторы, одной линией – векторы, известные по направлению. Например, если для точки В векторы  и
и  известны только по направлению, а вектор
известны только по направлению, а вектор  - по величине и направлению, то векторное уравнение будет иметь вид
- по величине и направлению, то векторное уравнение будет иметь вид  . Решая его графически (рис. 11.3.б), находят величины и .
. Решая его графически (рис. 11.3.б), находят величины и .
Построение планов ускорений для механизмов. Планом ускорений для механизмов называется векторный граф, состоящий из совмещенных планов ускорений всех его звеньев, построенных из одного полюса и в одном масштабе.
Построение плана ускорений отличается от построения плана скоростей следующим:
- векторное уравнение  , полученное разложением сложного плоского движения, справедливо только, когда переносное движение поступательное. Если переносное движение принято вращательным, то к правой части уравнения нужно прибавить кориолисово ускорение;
, полученное разложением сложного плоского движения, справедливо только, когда переносное движение поступательное. Если переносное движение принято вращательным, то к правой части уравнения нужно прибавить кориолисово ускорение;
- неизвестные уравнения раскладываются на две составляющие: нормальную, величина и направление которой определяется по построенному плану скоростей, и тангенциальную, направление которой определяется по схеме механизма;
- при построении треугольника относительных ускорений, подобного треугольнику на изображении звена, нельзя пользоваться способом проведения перпендикулярных сторон, поскольку эти треугольники повернуты один относительно другого на угол, отличный от 900.
Пример: построение плана ускорений для четырехзвенного шарнирного механизма, для которого построен план скоростей (рис.11.4.).
Ускорение  , так как
, так как  и
и  .
.
 .
.
|
Рис.11.4.Построение плана ускорений шарнирного четырехзвенника
Откладываем вектор  в выбранном масштабе от полюса
в выбранном масштабе от полюса  . Для определения
. Для определения  запишем уравнение
запишем уравнение  в развернутом виде
в развернутом виде  ,где
,где  .
.
Построив векторный многоугольник по уравнению(рис.12.4 в), находим  и полное ускорение
и полное ускорение  .
.
Для определения  строим
строим  подобный
подобный  и сходственно с ним расположенный (построение удобно выполнять методом засечек).
и сходственно с ним расположенный (построение удобно выполнять методом засечек).
В динамике изучается движение механических систем с учетом физических причин, вызывающих это движение.
Основные задачи, решаемые с помощью законов динамики:
- определение передаваемых машиной сил и работы;
- определение движения машины под действием приложенных сил;
- регулирование хода машины.
В механических системах действуют следующие силы:
- силы тяжести звеньев. Эти силы учитывают при силовом анализе механизмов, если они велики по сравнению с другими действующими силами. Равнодействующая сил тяжести звена приложена в центре тяжести  , где
, где  - масса звена,
- масса звена,  - ускорение свободного падения. Центр тяжести сложной фигуры определяют как точку приложения равнодействующих сил тяжести составляющих простейших фигур;
- ускорение свободного падения. Центр тяжести сложной фигуры определяют как точку приложения равнодействующих сил тяжести составляющих простейших фигур;
- силы инерции звеньев учитывают при силовых расчетах для большинства механизмов (за исключением сильно нагруженных тихоходных). Для звена массы , движущегося поступательно с ускорением  , равнодействующая сил инерции приложена к центру тяжести звена и равна
, равнодействующая сил инерции приложена к центру тяжести звена и равна  . Линия действия силы параллельна направлению движения.
. Линия действия силы параллельна направлению движения.
Пример: Требуется определить во сколько раз в рычажном механизме сила инерции ползуна превышает его силу тяжести, если число оборотов кривошипа составляет 300 об/мин, радиус ползуна равен 20 мм, длина хода 40 мм.
Наибольшее ускорение ползуна  29,5 м/с2
29,5 м/с2
Соотношение сил  = 3.
= 3.
Для вращающихся звеньев, имеющих плоскость симметрии перпендикулярную оси вращения:
- при  и положении центра тяжести на оси вращения (
и положении центра тяжести на оси вращения (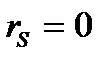 ) силы инерции элементарных масс взаимно уравновешиваются;
) силы инерции элементарных масс взаимно уравновешиваются;
|
|
|
|
- при и  равнодействующая
равнодействующая  приложена к центру тяжести и направлена от оси (является центробежной силой) (рис. 11.5 а);
приложена к центру тяжести и направлена от оси (является центробежной силой) (рис. 11.5 а);
а) б) в) г)
Рис.11.5 Схемы действия сил и моментов на элементарные звенья
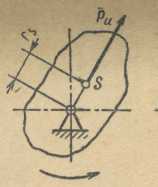
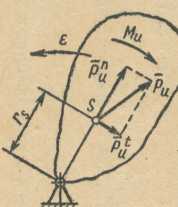
- при  и силы инерции приводятся к паре с моментом
и силы инерции приводятся к паре с моментом  , где
, где  - момент инерции звена относительно центра тяжести,
- момент инерции звена относительно центра тяжести,  - радиус инерции звена,
- радиус инерции звена,  - угловое ускорение (рис.12.5 б);
- угловое ускорение (рис.12.5 б);
- при и силы инерции приводятся к равнодействующей  , приложенной к центру тяжести звена, и к паре с моментом (рис. 12.5 в).
, приложенной к центру тяжести звена, и к паре с моментом (рис. 12.5 в).
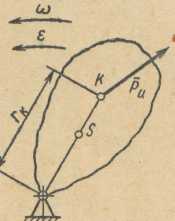
Нормальная и тангенциальная составляющие силы  равны
равны  . и
. и  могут быть сведены к одной равнодействующей
могут быть сведены к одной равнодействующей  , приложенной в центре качания, который находится на радиальной прямой, проходящей через центр тяжести. Расстояние от оси вращения О до центра качания К равно
, приложенной в центре качания, который находится на радиальной прямой, проходящей через центр тяжести. Расстояние от оси вращения О до центра качания К равно  (рис.11.5 г).
(рис.11.5 г).
Моменты инерции различных тел приведены в справочной литературе
Трение и силы трения в кинематических парах. Трение – это сопротивление относительному перемещению соприкасающихся тел, возникающее в месте их контакта.
Силы трения при сухом трении и рении со смазкой определяют с помощью коэффициентов трения. Сила трения при движении  , в покое
, в покое  , где
, где  коэффициенты трения при движении и в покое,
коэффициенты трения при движении и в покое,  - нормальная реакция (сила нормального давления). Значения коэффициентов трения приводятся в справочной литературе.
- нормальная реакция (сила нормального давления). Значения коэффициентов трения приводятся в справочной литературе.
|
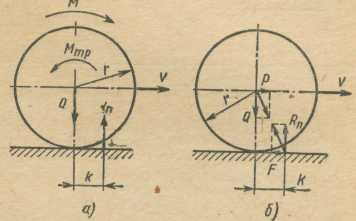
Трение качения. Момент трения (рис. 11.6а), образованный парой сил  при движении, равен
при движении, равен  , а в момент трогания
, а в момент трогания  .
.
Рис. 11.6 Схема действия сил и моментов при трении качения
а – приложен действующий момент, б – приложена движущая сила
Сила трения при движении (рис.11.6б)  , в покое
, в покое  , где
, где  - коэффициенты трения качения при движении и при покое, имеющие линейную размерность.
- коэффициенты трения качения при движении и при покое, имеющие линейную размерность.
Приведенные коэффициенты трения:
- для симметричных направляющих  , где
, где  - угол профиля направляющей;
- угол профиля направляющей;
- для винтовой пары  , где - угол профиля резьбы;
, где - угол профиля резьбы;
- для груза на направляющих качения (катках)  , где
, где  - диаметр катка.
- диаметр катка.
|
|
Дата добавления: 2014-11-29; Просмотров: 879; Нарушение авторских прав?; Мы поможем в написании вашей работы!