КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
С учетом последнего выражения формула (76) приобретет вид
|
|
|
|
 (77)
(77)
Проецируя равенство (77) на координатные оси, получаем формулы для определения проекций скорости точки В на эти оси:
 (78)
(78)
 (79)
(79)
Плоские механизмы в своем составе могут содержать звенья (тела), совершающие вращательное движение вокруг неподвижных осей, и звенья, совершающие плоское движение. При определении скоростей отдельных точек таких звеньев будем применять формулы, аналогичные формулам (73)–(79).
Задача К4
На с. 97-101 приведены схемы манипуляторов для различных вариантов задания. Здесь же даны соотношения между длинами звеньев. Необходимые исходные данные приведены в табл. К4.1. В вариантах К4.4, К4.9, К4.15, К4.17, К4.22 и К4.25 каток 2 относительно опорной поверхности не проскальзывает.
Закон изменения скорости схвата груза А для всех вариантов задания одинаков и имеет вид
VA = VAy = V×sin pt; V = 0,45 м/с; р = 1,87 рад/с.
Кинематический расчет манипулятора необходимо провести в интервале времени t = 0-1,68 с шагом 0,07 с.
Пример К4. Рассмотрим манипулятор, предназначенный для перемещения груза А (рис. К4а). Груз за отрезок времени t под действием двигателей управления, расположенных в шарнирах В и D, перемещается по вертикальной прямой из точки а в точку b с заданной скоростью  (
( ), являющейся известной функцией времени.
), являющейся известной функцией времени.
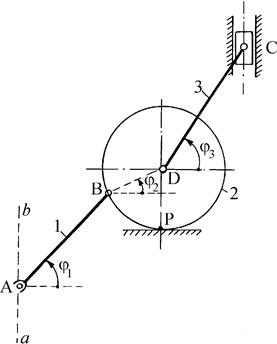
Рис. К4а
Звенья манипулятора считаются абсолютно твердыми телами. Каток 2 относительно опорной поверхности не проскальзывает. Требуется определить угловые скорости w1, w2, w3 звеньев 1, 2, 3, а также скорость точки С как функции времени.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 529; Нарушение авторских прав?; Мы поможем в написании вашей работы!