КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Краткие теоретические сведения. Исследование динамических характеристик одноконтурной САУ скоростью ДПТ
|
|
|
|
Исследование динамических характеристик одноконтурной САУ скоростью ДПТ
ДИНАМИЧЕСКИЕ СИСТЕМЫ С РАЗЛИЧНЫМИ РЕГУЛЯТОРАМИ,ПРОГРАММНОЕ ИСПОЛНЕНИЕ
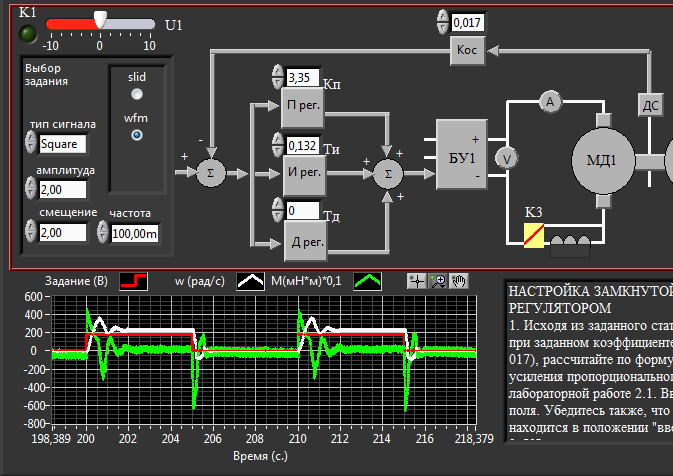
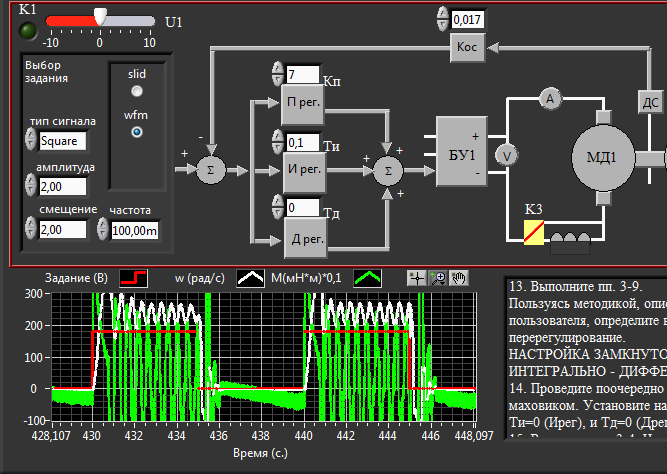
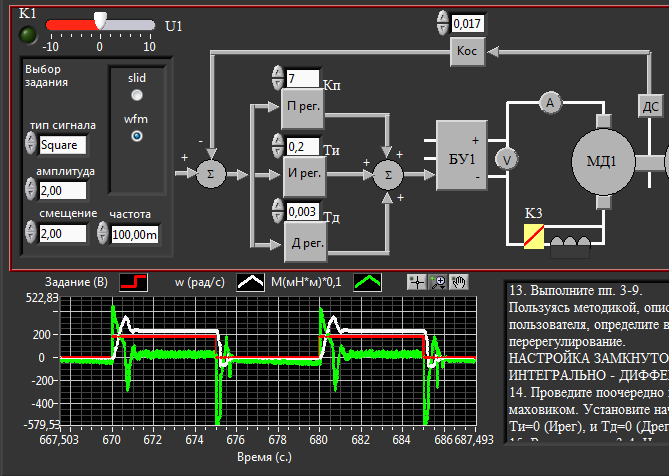
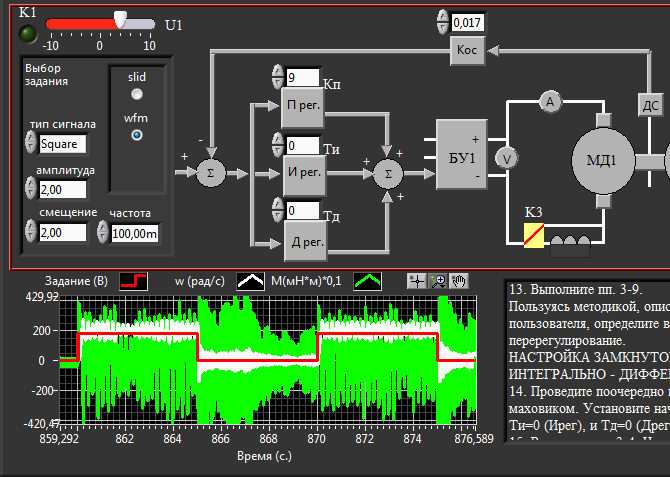
Заключительный скриншот после выполнения лабораторной работы
Основные показатели качества переходных процессов
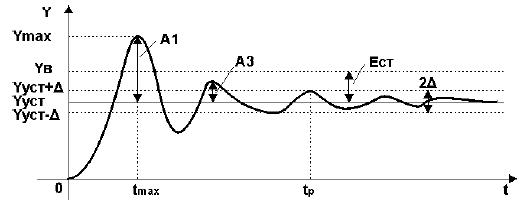
Рис. 9.3‑1 График, иллюстрирующий основные показатели качества переходного процесса.
 - установившееся значение выходной величины.Установившееся значение выходной величины Yуст определяется по переходной характеристике, представленной на Рис. 9.3‑1.
- установившееся значение выходной величины.Установившееся значение выходной величины Yуст определяется по переходной характеристике, представленной на Рис. 9.3‑1.
Ψ – степень затухания.
 (1)
(1)
где
 и
и  – соответственно амплитуды 1-го и 3-го максимумов переходной характеристики (Рис. 9.3‑1)
– соответственно амплитуды 1-го и 3-го максимумов переходной характеристики (Рис. 9.3‑1)
 – время достижения первого максимума
– время достижения первого максимума
Время достижения первого максимума tmax определяется по переходной характеристике, представленной на Рис. 9.3‑1.
 – времярегулирования (время, закотороеколебанияконтролируемой переменнойперестают превышать 5% от установившегося значения)
– времярегулирования (время, закотороеколебанияконтролируемой переменнойперестают превышать 5% от установившегося значения)
Время регулирования  определяется согласно Рис. 9.3‑1 следующим образом:
определяется согласно Рис. 9.3‑1 следующим образом:
1. Находится допустимое отклонение  .Например, задается
.Например, задается 
2. Строится «зона» шириной  (см. Рис. 9.3‑1).
(см. Рис. 9.3‑1).
3. Время соответствует последней точке пересечения  с границей зоны.
с границей зоны.
 – ошибка регулирования
– ошибка регулирования
Статическая ошибка регулирования  , где
, где  - входная величина (см. Рис. 9.3‑1).
- входная величина (см. Рис. 9.3‑1).
Обозначим перерегулирование –Y. При отработке ступенчатого воздействия (по сигналу задания) – см. Рис. 9.3‑1 величина перерегулирования определяется по формуле:
 (2)
(2)
где значения величин  и
и  определяются согласно Рис. 9.3‑1.
определяются согласно Рис. 9.3‑1.
Настройка системы с пропорциональным (П) регулятором
Рассчитаем статизм разомкнутой системы. При максимальном задании на напряжение, номинальном моменте и единичном коэффициенте Кп (Прег)статизм в процентах будет:
|
|
|
 (3)
(3)
Тогда коэффициент усиления пропорционального регулятора получится:
 (4)
(4)
где:
 - активное сопротивление якорной цепи (получено в лабораторной работе 9.1.1 Определение активного сопротивления обмотки якоря микродвигателя);
- активное сопротивление якорной цепи (получено в лабораторной работе 9.1.1 Определение активного сопротивления обмотки якоря микродвигателя);
 - момент сопротивления на валу двигателя (примем
- момент сопротивления на валу двигателя (примем  мН*м);
мН*м);
 - коэффициент электромеханического преобразования (получен в лабораторной работе 1.2;
- коэффициент электромеханического преобразования (получен в лабораторной работе 1.2;
 - заданный (желаемый) статизм системы (в данной работе рекомендуемое значение
- заданный (желаемый) статизм системы (в данной работе рекомендуемое значение  );
);
 - коэффициент усиления преобразователя (
- коэффициент усиления преобразователя ( );
);
 - максимальное напряжение задания (
- максимальное напряжение задания ( В).
В).
Поскольку формула (3) не учитывает динамику системы, данный коэффициент может привести к чрезмерной колебательности и даже к неустойчивости системы. Поэтому после проверки системы на скачок задания величину  в случае необходимости нужно уменьшить.
в случае необходимости нужно уменьшить.
Отметим, что все рассчитанные настройки регуляторов не являются окончательными. Обычно для получения окончательной настройки расчетные значения берутся в качестве базовых, и на основании последующих испытаний производится корректировка.
Ниже представлен пример последовательности скриншотов при настройке системы с пропорциональным (П) регулятором без маховика и с маховикомисходя из заданного статизма системы.
Система с маховиком:
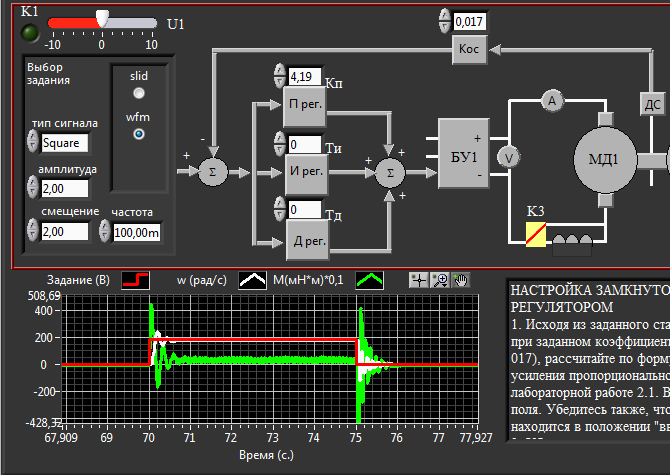
Система без маховика:
Ниже представлен пример последовательности скриншотов при настройке системы с пропорциональным (П) регулятором без маховика и с маховикомисходя из соотношения основной постоянной времени (механической) системы -  и времени запаздывания –
и времени запаздывания –  .
.
Система с маховиком:
Система без маховика:
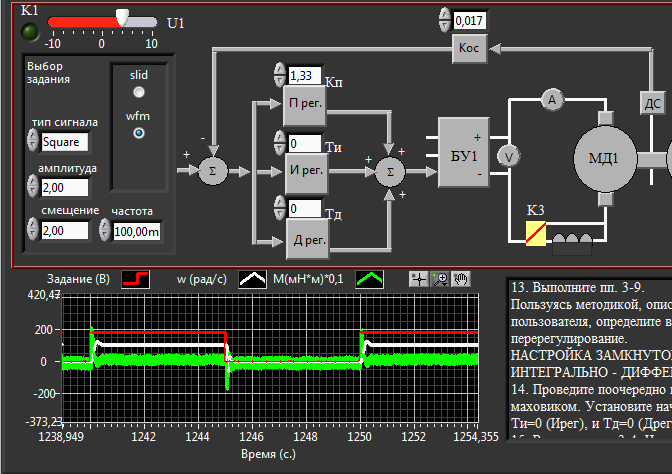
Настройка системы с пропорционально-интегральным (ПИ) регулятором
Цель настройки – свести статическую ошибку к нулю и увеличить быстродействие системы путем компенсации наибольшей постоянной времени системы.
|
|
|
Если электрическая постоянная времени мала по сравнению с механической, двигатель представляет из себя инерционное звено с передаточной функцией 
Введем в прямой канал управления ПИ-регулятор с передаточной функцией:
 (5)
(5)
где:
 - полная механическая постоянная времени системы;
- полная механическая постоянная времени системы;
 - коэффициент усиления разомкнутой системы
- коэффициент усиления разомкнутой системы 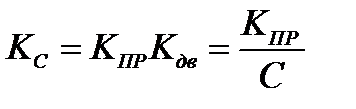 ;
;
 - коэффициент усиления двигателя по скорости;
- коэффициент усиления двигателя по скорости;
 - заданная (желаемая) постоянная времени системы
- заданная (желаемая) постоянная времени системы  порядка
порядка  ;
;
 - время задержки (чистого запаздывания) системы.
- время задержки (чистого запаздывания) системы.
Тогда замкнутая система с ПИ-регулятором при единичной отрицательной обратной связи будет иметь передаточную функцию:
 ,
,
где
– заданная желаемая постоянная времени.
Коэффициенты регуляторов, с учетом не единичного коэффициента обратной связи, будут:
 ;
;  (6)
(6)
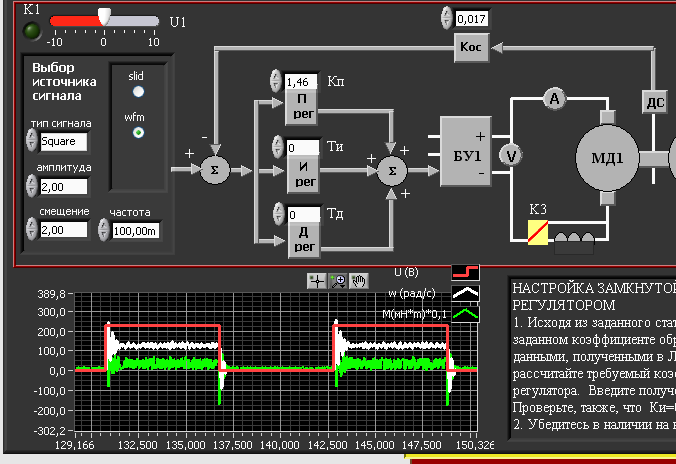
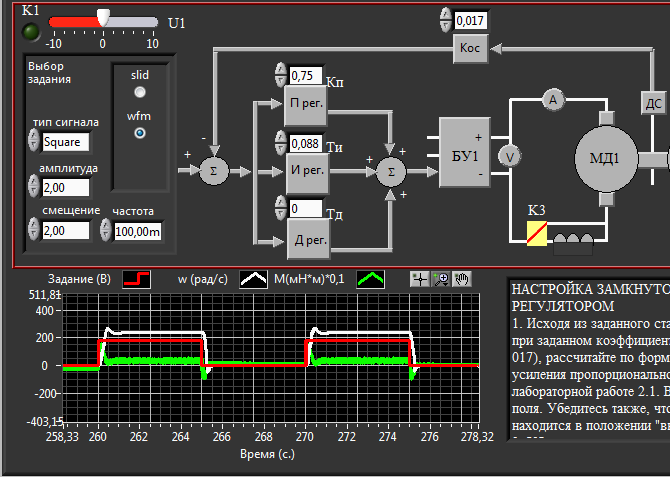
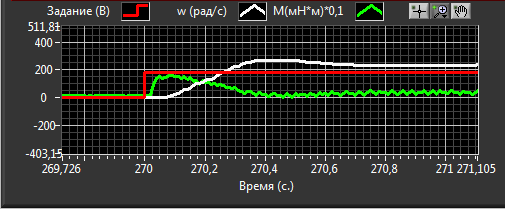
Ниже представлена последовательность скриншотов при настройке системы с пропорционально-интегральным (ПИ) регулятором без маховика и с маховиком.
Пример системы с маховиком:
Пример системы без маховика:
Настройка системы с пропорционально-интегрально-дифференциальным (ПИД) регулятором
Способ поочередной настройки регуляторов:
При  и
и  равных нулю, принимаем
равных нулю, принимаем  и постепенно увеличивая
и постепенно увеличивая  , добиваемся автоколебаний в системе. Фиксируем граничный коэффициент
, добиваемся автоколебаний в системе. Фиксируем граничный коэффициент  .
.
Принимаем 
При  и принятом
и принятом  , принимаем
, принимаем  постепенно уменьшая
постепенно уменьшая  , добиваемся автоколебаний в системе. Фиксируем граничное значение
, добиваемся автоколебаний в системе. Фиксируем граничное значение  .
.
Принимаем 
Припринятых  и
и  , постепенно увеличивая
, постепенно увеличивая  с нулевого значения, добиваемся автоколебаний в системе. Фиксируем граничное значение
с нулевого значения, добиваемся автоколебаний в системе. Фиксируем граничное значение  .
.

Принимаем 
Настройка ПИД-регулятора методом Циглера-Николса
Для настройки данным методом необходимо вначале для замкнутой системы при разомкнутых И- и Д- регуляторах определить граничное значение  , соответствующее
, соответствующее  , при котором начинаются автоколебания, а также период этих автоколебаний –
, при котором начинаются автоколебания, а также период этих автоколебаний –  .
.
Затем по таблице, исходя из типа выбранного регулятора, рассчитываются соответствующие коэффициенты.
В Табл.1 приведены формулы расчета ПИД регулятора для случая, когда передаточная функция:
 (7)
(7)
Табл.1
| N | Тип регулятора | 
| 
| 
|
| П | 
| - | - | |
| ПИ | 
| 
| - | |
| ПИД | 
| 
| 
|
Если регулятор имеет вид, представленный ниже:
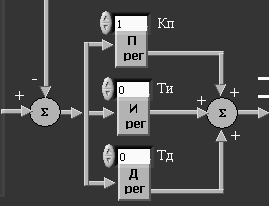
то коэффициенты пересчитываются следующим образом:
|
|
|
 ;
;  ;
;  (8)
(8)
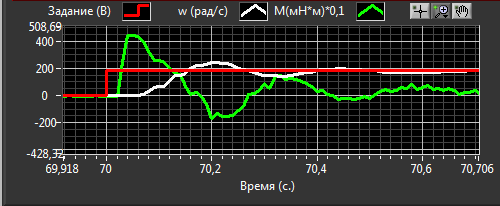
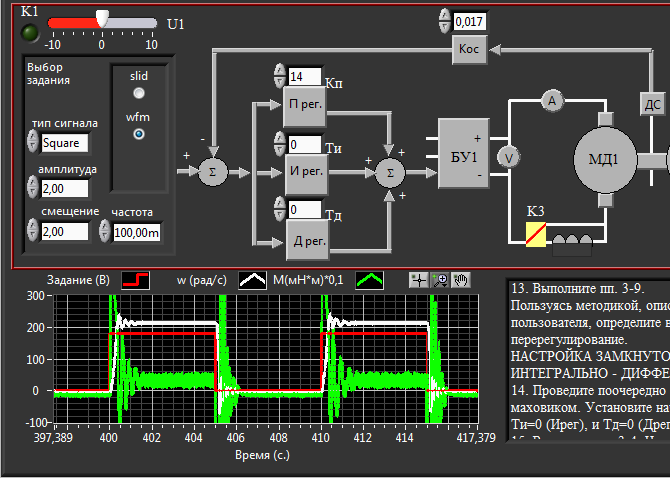
Вариант без маховика
Убедимся в отсутствии маховика, выставим  ,
,  ,
,  и начнем постепенно (рекомендуемый шаг 0.1) увеличивать
и начнем постепенно (рекомендуемый шаг 0.1) увеличивать  . Добившись устойчивых автоколебаний, запишем их период –
. Добившись устойчивых автоколебаний, запишем их период –  .
.
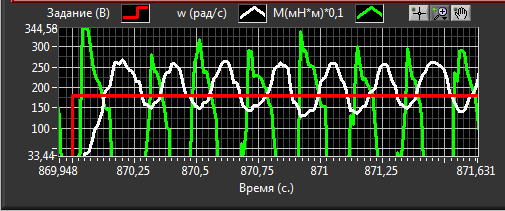
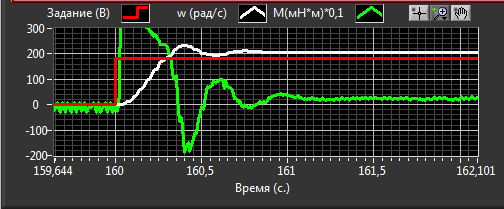
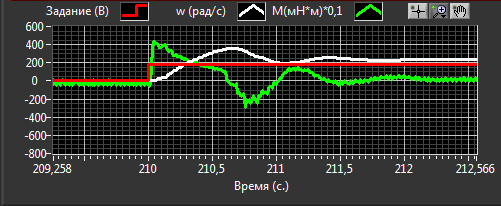
Увеличиваем масштаб графика и определяем период автоколебаний  .
.
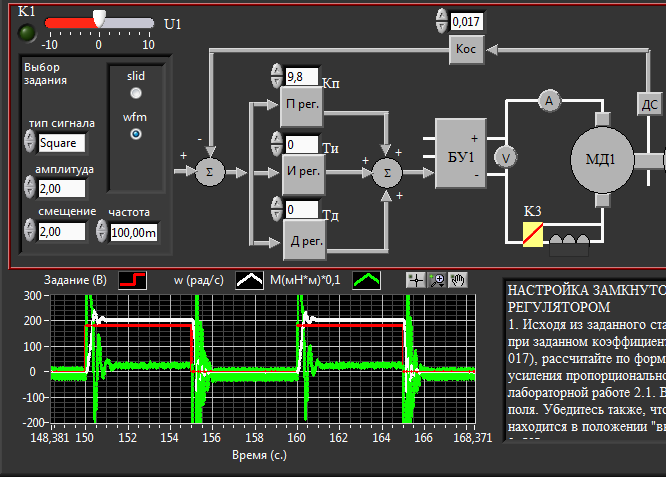
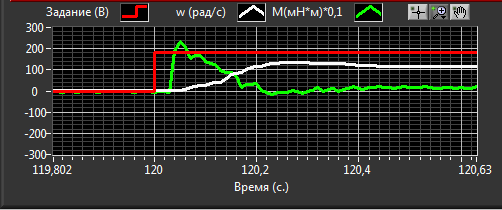
Затем начнем уменьшать  , пока колебания не станут затухающими. Запишем
, пока колебания не станут затухающими. Запишем 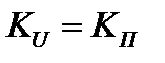 .
.
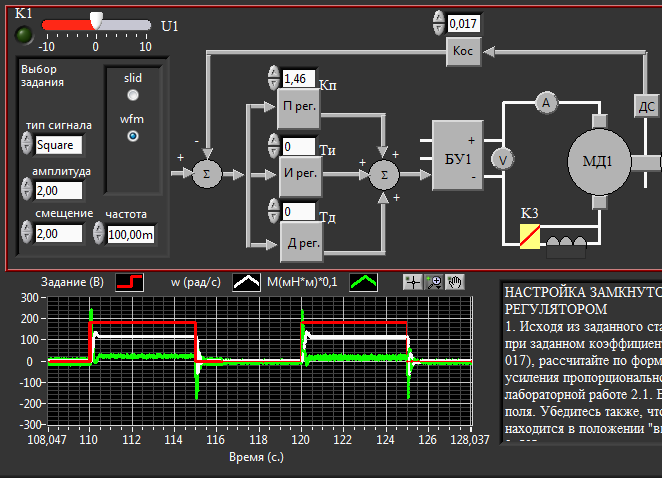
По Табл.1 и формулам пересчета (8) рассчитаем коэффициены регуляторов  ,
,  и
и  .
.
Установим коэффициенты регуляторов по полученным данным и запустим систему.
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 568; Нарушение авторских прав?; Мы поможем в написании вашей работы!