КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Нижче наведено загальний вигляд кадру протоколу Modbus. 2 страница
3) Це сукупність труб і трубних кабелів, з'єднувальних і приєднувальних пристроїв та інших елементів зібраних у єдину конструкцію, що прокладена на елементах будинків і споруд або на технологічному устаткуванні.
4) Це сукупність труб і трубних кабелів, з'єднувальних і приєднувальних пристроїв та інших елементів зібраних у єдину конструкцію, що прокладена на технологічному устаткуванні.
17. Які існують варіанти встановлення щитових приміщень у вибухонебезпечних установках?
1) Окремо та прибудовано.
2) Прибудовано та у межах вибухонебезпечної зони.
3) Окремо, прибудовано, у межах вибухонебезпечної зони.
4) Окремо, прибудовано, у межах та безпосередньо у вибухонебезпечній зоні.
18. Яке планування операторських приміщень вважається найбільш прийнятним?
1) Всі панелі оперативного приладового щита розташовують вздовж коридору, а місце оператора у плані знаходиться у вершині кута 127° від крайніх точок.
2) Всі панелі оперативного приладового щита розташовують вздовж однієї стіни, а місце оператора у плані знаходиться у вершині кута 120° від крайніх точок.
3) Всі панелі оперативного приладового щита розташовують вздовж двох стін, а місце оператора у плані знаходиться посередині.
4) Всі панелі оперативного приладового щита розташовують вздовж однієї стіни, а місце оператора у плані знаходиться у вершині кута 90° від крайніх точок.
Тестові завдання з дисципліни
«Програмування багаторівневих систем управління».
1. Виберіть найважливішу характеристику багаторівневої системи.
1. Багатопроцесорність.
2. Перешкодостійкість.
3. Масштабованість.
4. Багатопотоковість.
2. У яких одиницях вимірюється швидкодія обчислювальної системи?
1. Мб/сек.
2. Бодах.
3. Мфлоп/сек.
4. Мгц.
3. Що називають пріоритетом завдання в обчислювальній техніці (програмуванні)?
1. Число, яке присвоюється ОС кожному процесу і завданню за певними правилами.
2. Порядок виконання завдань, вказаний програмістом.
3. Число, яке визначається за алгоритмом round robin.
4. Результат виконання алгоритму FIFO.
4. Який тип алгоритму реалізовується при плануванні завдань згідно FIFO?
1. Алгоритм планування з перемиканнями.
2. Алгоритм планування без перемикань.
3. Алгоритм планування без перемикань, що припускає тимчасові відрізки роботи завдань.
4. Алгоритм з найменшим часом виконання.
5. Система називається планованою, якщо вона задовольняє умові:
1. 
2.  .
.
3.  .
.
4.  .
.
6. За якою формулою визначається коефіцієнт використання центрального процесора?
1.  .
.
2.  .
.
3.  .
.
4.  .
.
7. Апаратно-програмний комплекс, що за передбачений момент часу реагує на непередбачений потік подій називається:
1. передбаченою системою.
2. системою реального часу.
3. керованою системою.
4. детермінованою системою.
8. Системи, які не дозволяють жодних затримок реакції системи за жодних умов називають:
1. системами м’якого реального часу.
2. операційними системами реального часу.
3. мережевими операційними системами.
4. системи жорсткого реального часу.
9. Як називається набір системних бібліотек для ОС Windows, що надаються операційною системою кожній розроблюваній програмі?
1. Win32.
2. WinAPI.
3. Win64.
4. MSDN.
10. Як називається один із послідовних комунікаційних портів персонального комп’ютера?
1. USB.
2. UART.
3. COM1.
4. RS-232C.
11. Яка інша назва інтерфейсу RS-485?
1. RS-232.
2. ЕІА/ТІА-485.
3. ЕІА-485.
4. ЕІА/ТІА-232C.
12. Функція для відкриття (ініціалізації) послідовного порту називається:
1. OpenFile().
2. CreateHandle().
3. OpenHandle().
4. CreateFile().
13. Основні параметри послідовного порту описуються структурою -
1. DCB.
2. CBR.
3. DB.
4. DBR.
14. Команда PurgeComm використовується для:
1. встановлення маски порту.
2. скидання порту.
3. закриття порту.
4. встановлення параметрів порту.
15. Як задається команда для передачі даних на порт?
1. ReadFile().
2. Read().
3. Write().
4. WriteFile().
16. Як називаються набори команд, що можуть одержувати час процесора?
1. Процеси.
2. Завдання.
3. Пріоритети.
4. Потоки.
17. Як називається клас, що відповідає за створення і роботу потоків у об’єктно-орієнтованих мовах програмування?
1. TThread.
2. TreadThread.
3. Win32.
4. WinAPI.
18. Який драйвер потрібно підключити до проекту для створення клієнт-серверної бази даних на основі Access?
1. Microsoft Access Driver.
2. Driver do Microsoft Access.
3. Microsoft Access Treiber.
4. SQL Server.
Тестові завдання бакалаврського іспиту з дисципліни:
«Спеціальні вимірювання і прилади»
1. З якою метою проводять додаткове цілеспрямоване перетворення проби при аналітичних вимірюваннях?
а) - з метою суттєвої зміни складу суміші на основі хімічних реакцій і визначення її молекулярного або елементного складу;
б) - з метою розділення проби на компоненти з наступним вимірюванням певної фізико-хімічної властивості;
в) - з метою забезпечення вищої вибірковості аналітичного вимірювання;
г) - з метою зміни її агрегатного стану без зміни складу.
2. За якої умови багатокомпонентну суміш при аналізі її складу розглядають як псевдобінарну?
а) - невимірювані компоненти складають суміш постійного складу, а вимірювання фізико-хімічної властивості піддослідної суміші відбувається за рахунок зміни співвідношення концентрацій вимірюваного компонента і суміші невимірюваних компонентів;
б) - фізико-хімічні властивості всіх невимірюваних компонентів піддослідної суміші безмежно великі в порівнянні з фізико-хімічними властивостями вимірюваного компонента;
в) - фізико-хімічні властивості всіх невимірюваних компонентів практично однакові і не відрізняються від однойменної фізико-хімічної властивості вимірюваного компонента;
г) - фізико-хімічні властивості суміші адитивні, тобто можуть бути визначені як сума добутків фізико-хімічних властивостей компонентів на їх концентрації, виражені в долях.
3. Промисловий аналізатор циклічної дії відрізняється від промислового аналізатора неперервної дії наявністю одного із наступних елементів:
а) - дозатора;
б) - детектора;
в) - перетворювача витрати;
г) - системи фізичного або хімічного впливу на піддослідну суміш.
4. Який параметр є інформативним у полярографічних газоаналізаторах?
а) - витрата аналізованого газу.
б) - коефіцієнт дифузії;
в) - гранична сила дифузійного струму;
г) - сила струму генерування титранта;
5. У яких газоаналізаторах (для визначення вмісту вимірюваного компоненту) використовують тепловий ефект реакції каталітичного окислення?
а) – термокондуктометричних.
б) – полярографічних;
в) – термохімічних;
г) –електрохімічних;
6. Яке із наведених співвідношень визначає математичну модель найпростішого аналізатора абсорбції і є рівнянням його статичної характеристики?
а) –; 
б) –; 
в) –  ;
;
г) –  .
.
7. Які із наведених типів мас-спектрометрів використовують для аналізу змінних концентрацій газових сумішей:
а) – радіочастотні мас-спектрометри;
б) – мас-спектрометри з поділом іонів у неоднорідному магнітному полі;
в) – мас-спектрометри з поділом іонів за часом прольоту;
г) –мас-спектрометри з поділом іонів в однорідному магнітному полі;
8. За якою залежністю визначається час проведення циклу аналізу у мас-спектрометрі з поділом іонів за часом прольоту в просторі, вільному від електричних і магнітних полів?
а) –  ;
;
б) –  ;
;
в) –  ;
;
г) –  .
.
9. Який параметр є мірою концентрації при визначенні складу розчинів за температурною депресією?
а) - різниця температури пару усередині й зовні вимірювального сильфона;
б) - різниця тисків парів контрольованого й еталонного розчинів;
в) - різниця температур киплячого розчину й насиченої водяної пари;
г) - різниця температур контрольованого й еталонного розчинів.
10. Який параметр є мірою концентрації при визначенні складу бінарних розчинів за тиском насичених парів?
а) - різниця тиску пару усередині й зовні вимірювального сильфона;
б) - різниця температур киплячого розчину й насиченої водяної пари;
в) - різниця тисків парів контрольованого й еталонного розчинів;
г) - різниця температур контрольованого й еталонного розчинів.
11. Який із оптичних методів визначення концентрації розчинів можна використати для кількісного аналізу складу оптично неактивних речовин?
а) - поляризаційно-оптичний метод аналізу;
б) - абсорбційно-оптичний метод аналізу;
в) - рефрактометричний метод аналізу;
г) - люмінесцентний метод аналізу.
12. Яку залежність, відповідно до закону Бугера-Ламберта-Бера, застосовують для визначення оптичної густини розчину:
а) -; 
б) -  ;
;
в) -  ;
;
г) -. 
13. Якими густиномірами можна визначати вміст твердої фази в рідині?
а) – ваговими;
б) – вібраційними (резонаторними);
в) – радіоізотопними;
г) – гідростатичними.
14. Який із віскозиметрів заснований на використанні прямого і зворотного магнітострикційного або п'єзоелектричного ефектів.
а) – вібраційний;
б) –з падаючою кулькою;
в) –капілярний;
г) – ротаційний.
15. Яка нормована відстань над поверхнею землі для встановлення давачів температури на метеорологічній станції:
а) – 2 метра;
б) – 0,5 метра;
в) –1 метр;
г) – 1,5 метра.
16. За якою формулою обчислюється постійна поправка станційного ртутного чашкового барометра при вимірюванні атмосферного тиску на метеорологічній станції?
а) – Δhп = -2,64∙10-3 h∙cos(2φ);
б) –Δhп = -1,63∙10-4 h t;
в) – Δhп = Δhі + Δhφ ∙ Δhz;
г) – Δhп = -3,14∙10-7 h z.
17. З якою метою проводиться акустичне зондування атмосфери?
а) – визначення температури і вологості атмосферного повітря.
б) – визначення середньої швидкості повітряного потоку;
в) – визначення модуля швидкості потоку повітря і його напрямок;
г) –визначення турбулентності повітряного потоку;
18. Що визначають автоматичні засоби вимірювання температури спалаху?
а) – вміст у нафтопродуктах домішок, які не є вуглеводнями;
б) – наявність легких фракцій у нафтопродуктах;
в) – вміст низькокиплячих фракцій у нафтопродуктах;
г) – характеристику і фракційний склад палива.
19. Яким методом на практиці здійснюється вимірювання октанового числа бензинів?
а) – методом світіння;
б) –методом холодного полум’я;
в) – моторним методом;
г) – методом окислювання парів палива.
Тестові завдання з дисципліни
„ТЕОРІЯ АВТОМАТИЧНОГО УПРАВЛІННЯ ЛІНІЙНИМИ СИСТЕМАМИ”
1. Метою регулювання є
1) зміна регульованого параметра за наперед заданим законом.
*2) підтримка регульованого параметра на заданому рівні або зміна його за визначеним законом за допомогою керуючих впливів на об'єкт.
3) вироблення керуючих впливів автоматичним пристроєм за наперед заданим законом керування.
4) визначення помилки регулювання за каналами жадаючої та збурюючої дії.
2. Метою функціонування програмної АСР є
*1) зміна регульованої величини відповідно до заздалегідь заданої функції.
2) підтримка регульованого параметра на заданому постійному значенні за допомогою керуючих впливів на об'єкт.
3) зміна регульованого параметра за визначеним законом за допомогою керуючих впливів на об'єкт.
4) визначення помилки регулювання та вироблення керуючих впливів.
3. Керуючим впливом називається
1) вплив зовнішнього середовища на систему.
*2) вплив керуючого пристрою на об'єкт керування.
3) вплив, що прагне порушити необхідний функціональний зв'язок між задаючим впливом, і регульованою величиною.
4) різниця між заданим (х) і дійсним (у) значеннями регульованої величини.
4. Помилкою регулювання називається
1) різниця між збурюючим впливом та дійсним значенням регульованої величини.
2) сума керуючого впливу та сигналу завдання.
3) різниця керуючого впливу та дійсного значенням регульованої величини на об'єкт керування.
*4) різниця між заданим (х) і дійсним (у) значеннями регульованої величини.
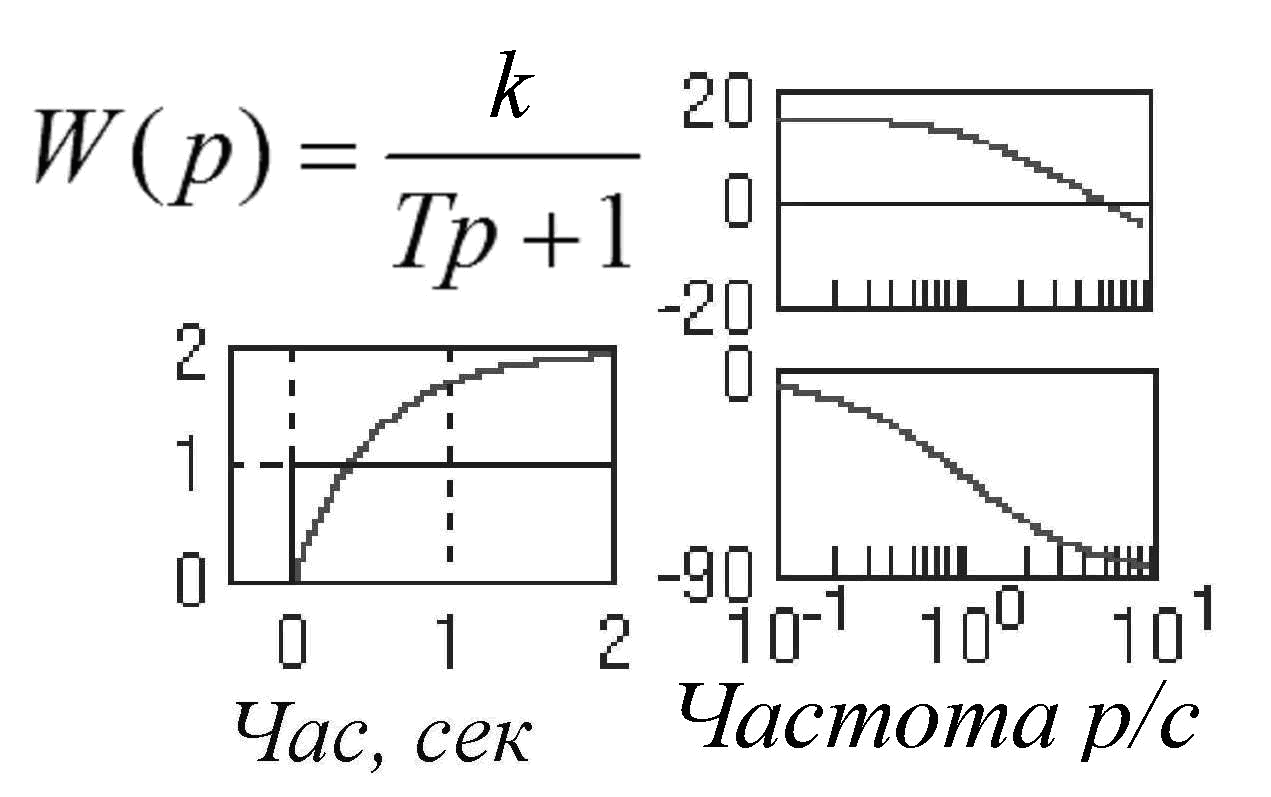
5. Чому дорівнює коефіцієнт підсилення об'єкта, показаного на схемі?
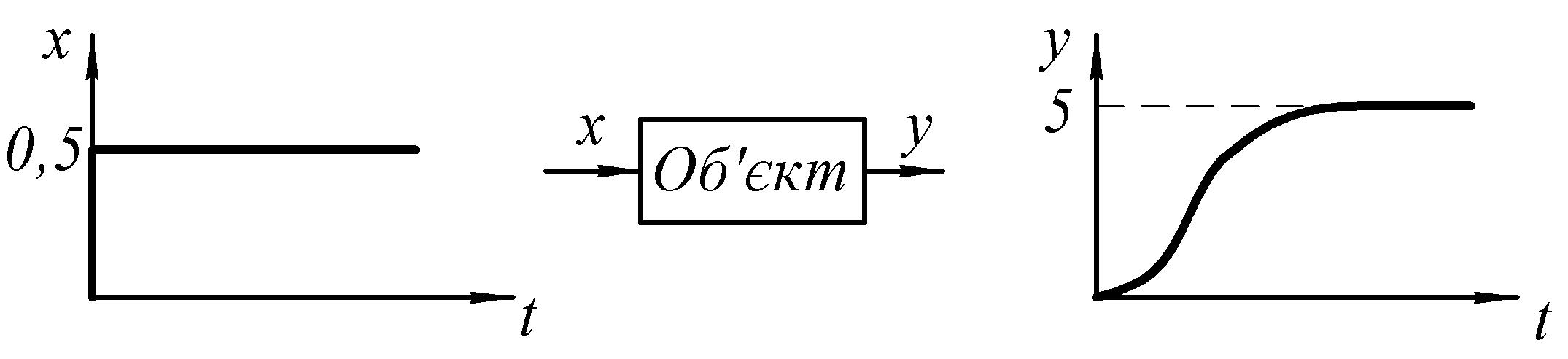
1) К = 2,5.
*2) К = 10.
3) К = 0,4.
4) К = 5.
6. Корені характеристичного рівняння системи називаються
*1) полюсами передаточної функції.
2) нулями передаточної функції.
3) кореневими значеннями системи.
4) запасами стійкості системи.
7. Яку ланку описує перехідний процес y(t) показаний на малюнку?
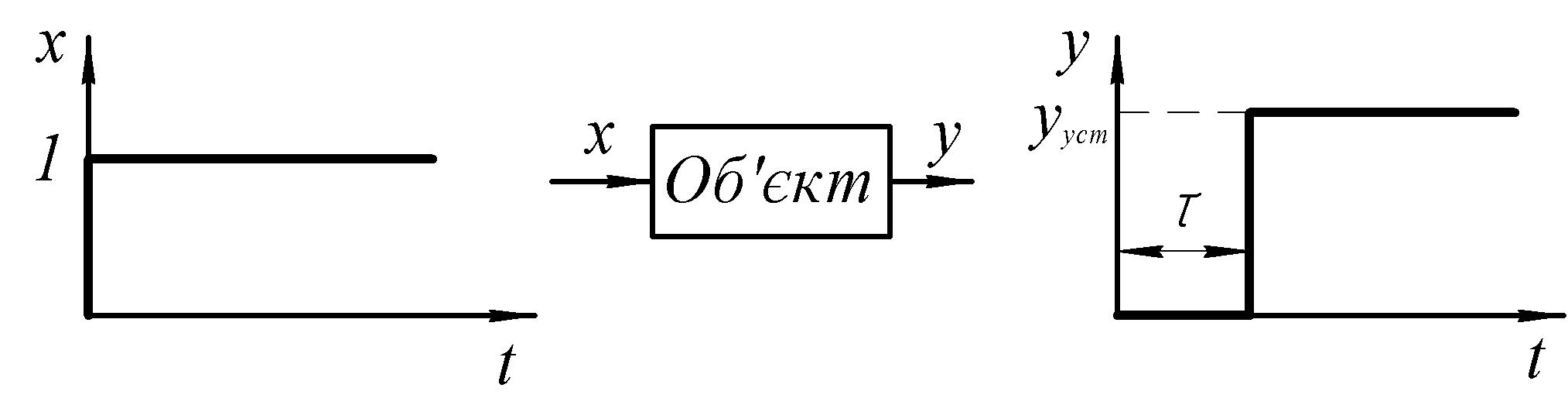
1) Пропорційну.
2) Аперіодичну.
*3) Запізнення.
4) Коливну.
8. Вкажіть тип динамічної ланки системи регулювання, що описується диференціальним рівнянням 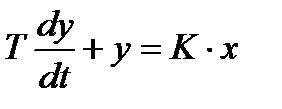 ?
?
1) Пропорційна.
*2) Аперіодична.
3) Ланка запізнення.
4) Коливна.
9. За якою формулою обчислюється передаточна функція для послідовного з'єднання динамічних ланок?

1) W(р)=W1(р)+ W2(р) + W3(р).
*2) W(р)=W1(р) * W2(р) * W3(р).
3) W(р)=W1(р) + W2(р) * W3(р).
 4) W(р)=
4) W(р)= 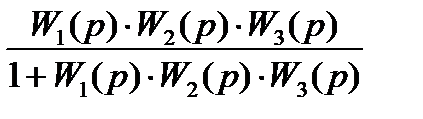 .
.
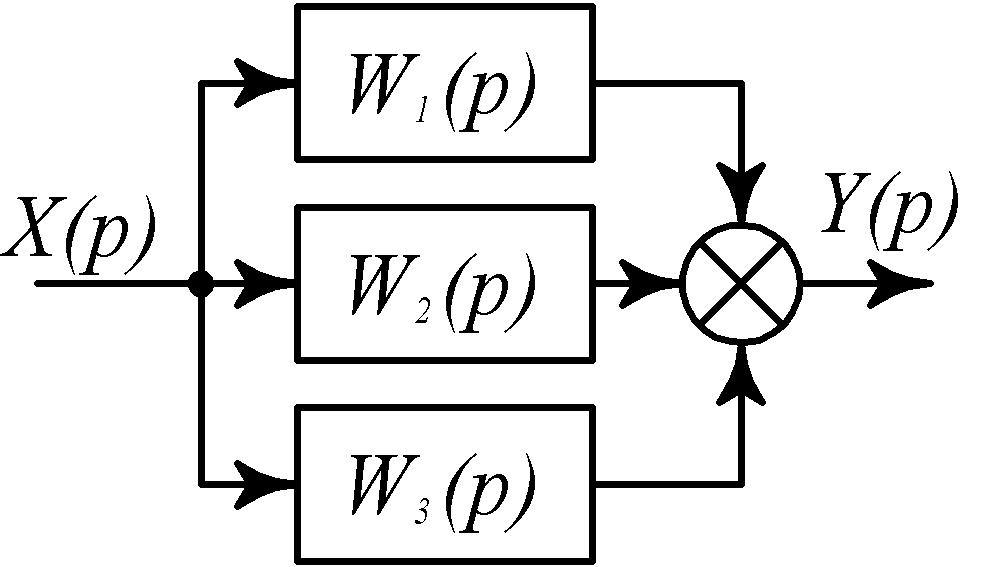
10. За якою формулою обчислюється передаточна функція для паралельного з'єднання динамічних ланок?
*1) W(р)=W1  + W2
+ W2  + W3
+ W3  .
.
2) W(р)=W1  – W2
– W2  – W3
– W3  .
.
3) W(р)=W1  * W2
* W2  * W3
* W3  .
.
4) W(р)=  .
.
11. Вкажіть формулу передаточної функції паралельного зустрічного з'єднання двох ланок.
1)  .
.
*2) 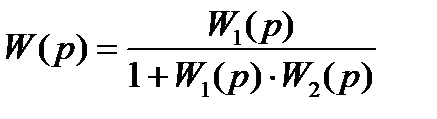 .
.
3)  .
.
4)  .
.
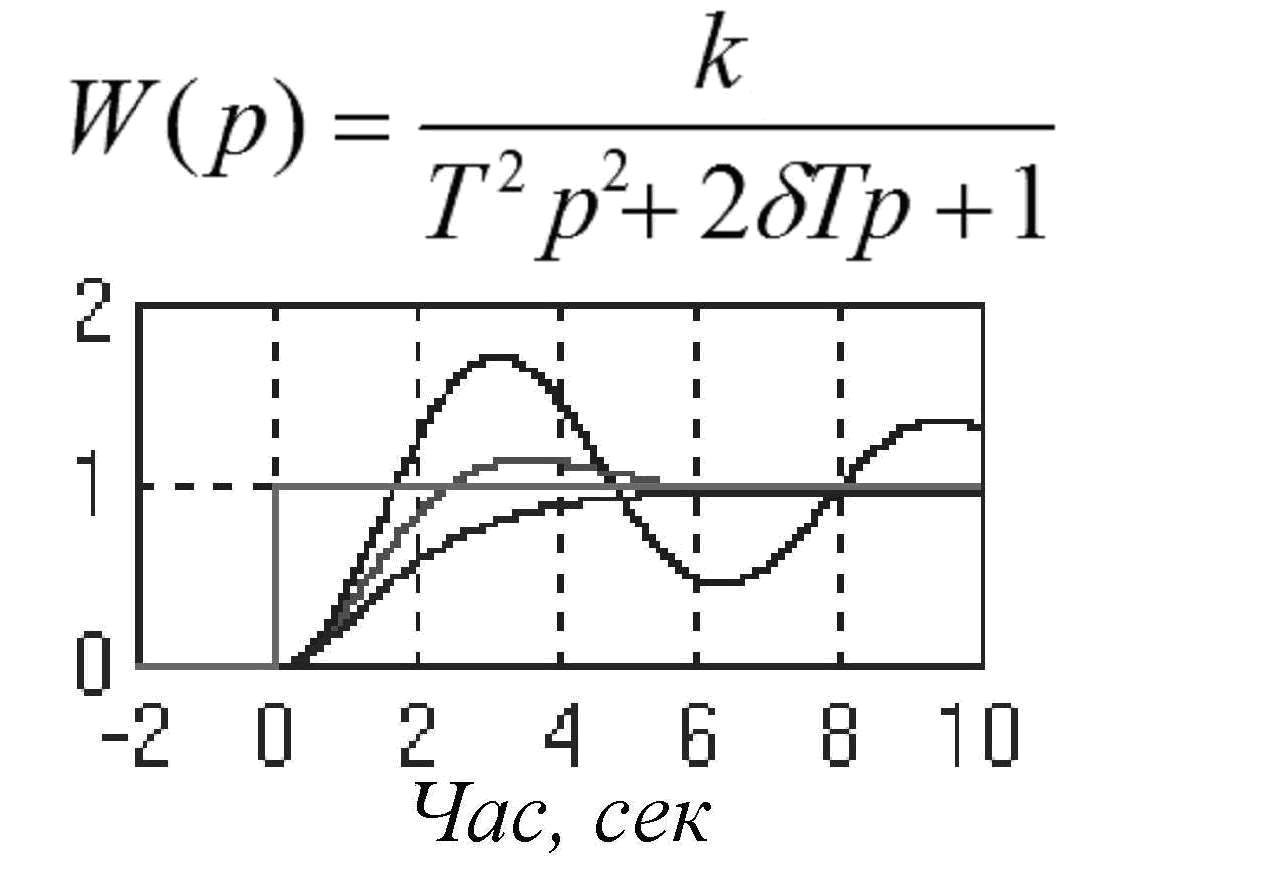 12. Вкажіть тип динамічної ланки, що описується передаточною функцією та перехідною характеристикою.
12. Вкажіть тип динамічної ланки, що описується передаточною функцією та перехідною характеристикою.
1) Пропорційна.
2) Аперіодична.
3) Запізнення.
*4) Коливна.
13. Вкажіть тип динамічної ланки, що описується передаточною функцією та перехідною характеристикою.
1) Пропорційна.
*2) Аперіодична.
3) Запізнення.
4) Коливна.
14. Реакція лінійної системи на одиничний ступінчастий вхідний сигнал називається
1) одиничною ступінчастою функцією.
2) одиничною імпульсною функцією.
*3) перехідна характеристикою.
4) імпульсною (ваговою) перехідною характеристикою.
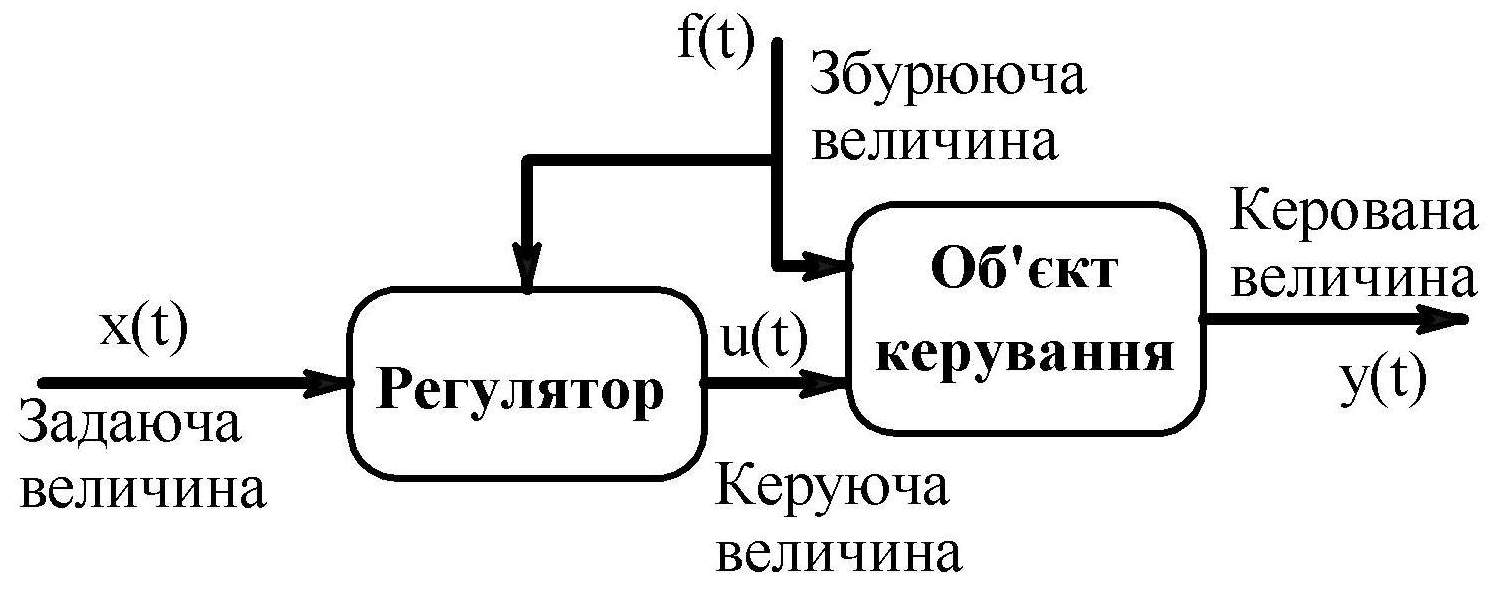 15. Наведена схема САК побудована за принципом:
15. Наведена схема САК побудована за принципом:
1) розімкнутого (жорсткого) керування.
2) керування за відхиленням.
*3) керування за збуренням.
4) комбінованого керування.
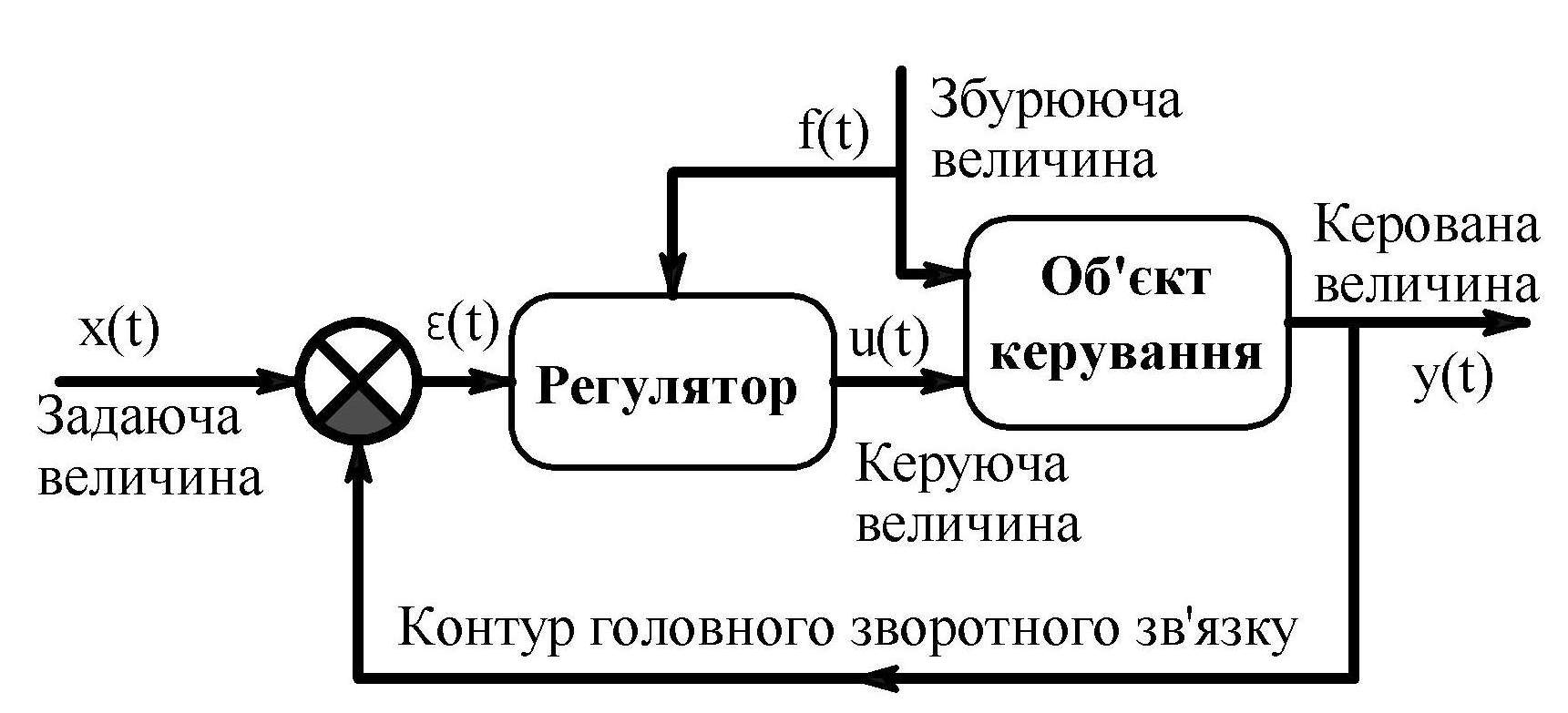
16. Наведена схема САК побудована за принципом:

1) розімкнутого (жорсткого) керування.
*2) керування за відхиленням.
3) керування за збуренням.
4) комбінованого керування.
17. Наведена схема САК побудована за принципом:
1) розімкнутого (жорсткого) керування.
2) керування за відхиленням.
3) керування за збуренням.
*4) комбінованого керування.
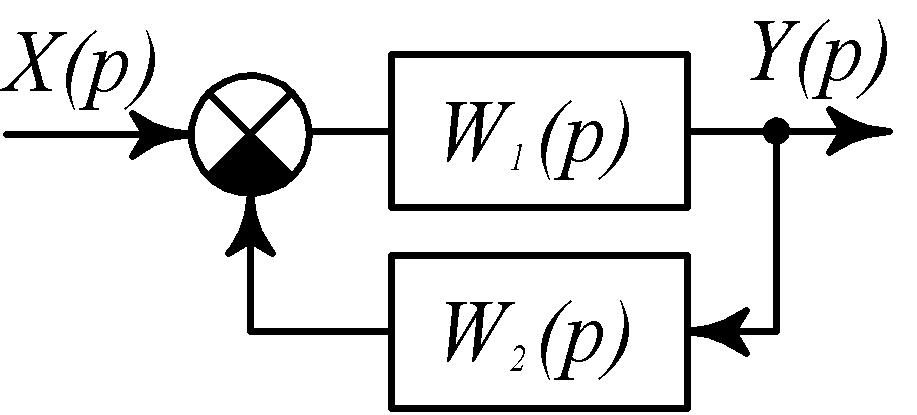
18. Вкажіть передаточну функцію, яка описує дану структурну схему САУ.
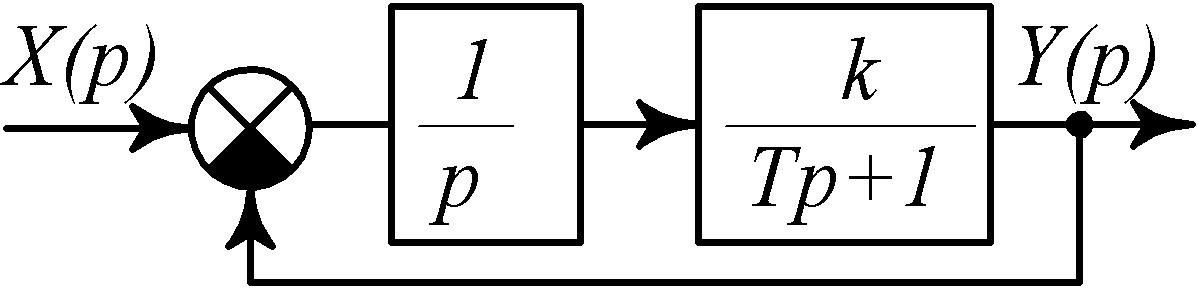 1)
1)  .
.
*2) 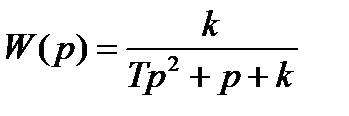 .
.
3)  .
.
4) 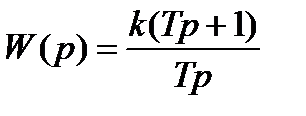 .
.
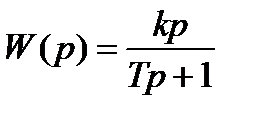
19. Вкажіть передаточну функцію, що описує дану структурну схему САК.
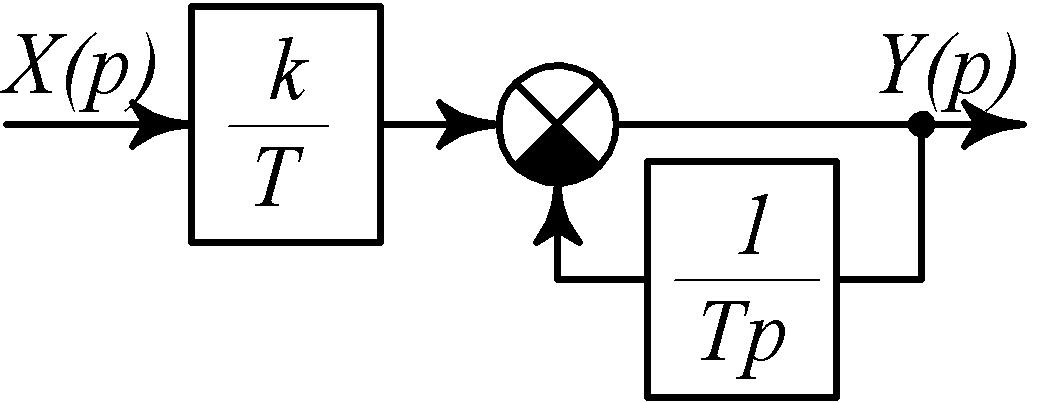 *1) .
*1) .
2) .
3) .
4) .
20. Вкажіть передаточну функцію, що описує дану структурну схему САК.
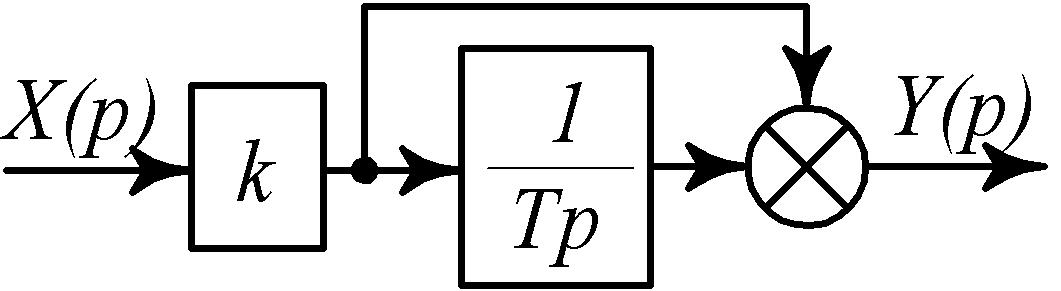 1) .
1) .
2) .
3) .
*4) .
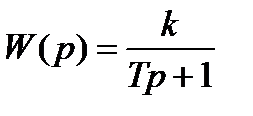
21. Вкажіть передаточну функцію, що описує дану структурну схему САК.
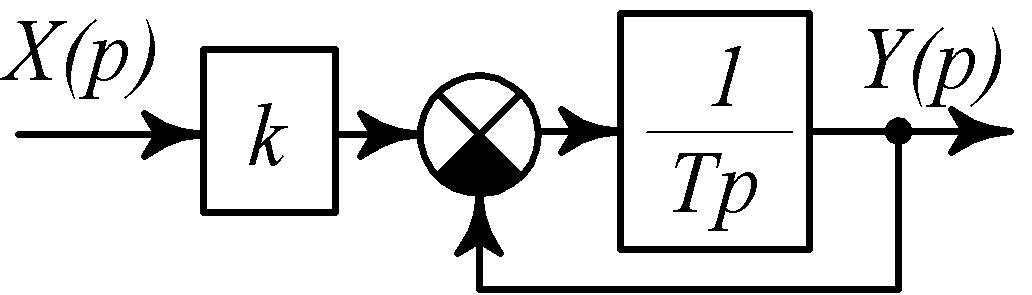 1) .
1) .
2) .
*3) .
4) .
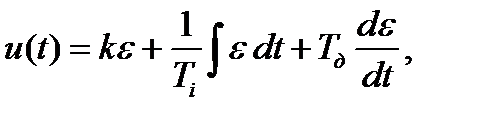
22. Вкажіть диференціальне рівняння та передаточну функцію, що описують пропорційно-інтегральний закон регулювання.
1) 
 .
.
*2) 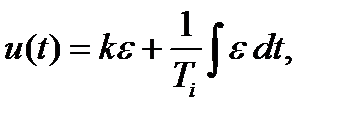
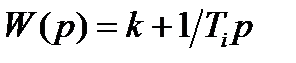 .
.
3) u(t) = k×e, 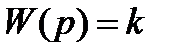 .
.
4) 
 .
.
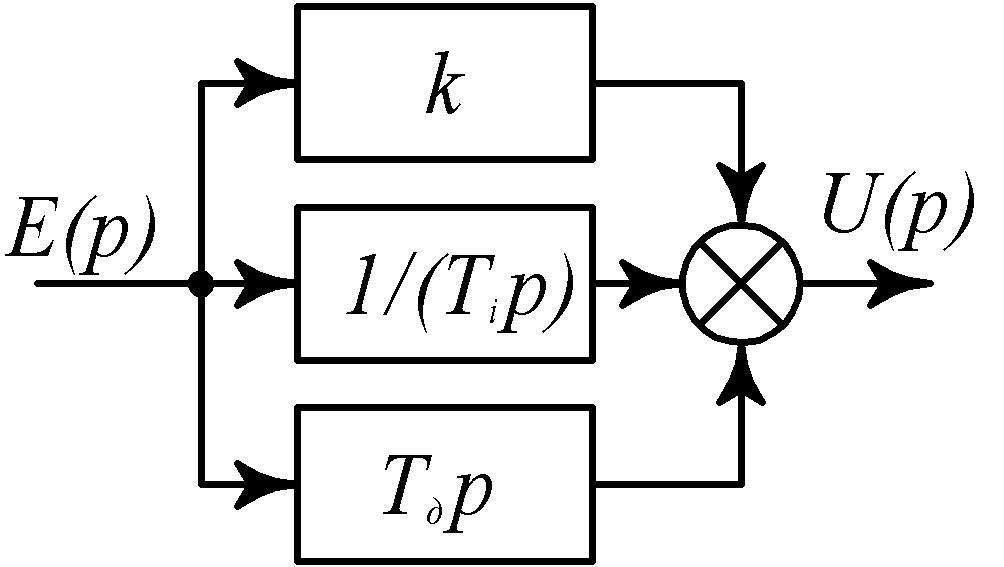 23. Який закон автоматичного управління реалізує структурна схема?
23. Який закон автоматичного управління реалізує структурна схема?
1) Пропорційно-інтегральний.
2) Пропорційний.
*3) Пропорційно - інтегрально - диференціальний.
4) Інтегральний.
24. Як називається відношення зображення за Лапласом вихідної величини до зображення вхідної величини при нульових початкових умовах?
1) Одинична ступінчаста функція.
2) Одинична імпульсна функція.
3) Перехідна функція.
*4) Передаточна функція.
25. Що називається характеристичним поліномом системи автоматичного управління?
1) Чисельник передаточної функції.
*2) Знаменник передаточної функції.
3) Різниця передаточних функцій розімкнутої та замкнутої системи.
4) Лінеаризоване диференціальне рівняння системи керування.
26. Залежність відношення амплітуди вихідного сигналу (Aвих) до амплітуди вхідного сигналу (Aвх) від частоти w вхідного сигналу називається
1) фазовою частотною характеристикою.
2) уявною частотною характеристикою.
3) дійсною частотною характеристикою.
*4) амплітудною частотною характеристикою.
27. Залежність зсуву фаз вхідного і вихідного сигналів від частоти w вхідного сигналу називається
*1) фазовою частотною характеристикою.
2) уявною частотною характеристикою.
3) дійсною частотною характеристикою.
4) амплітудною частотною характеристикою.
28. Крива, що описується кінцем вектора W(jw) при зміні частоти w від 0 до нескінченності називається
1) радіус вектором W(jw).
2) фазово-частотною характеристикою.
3) амплітудно-частотною характеристикою.
*4) годографом АФЧХ.
29. Стійкістю САР називають
1) властивість системи не змінювати свою структуру під дією задаючого впливу.
2) здатність системи перетворювати вхідні сигнали у вихідні.
*3) властивість системи повертатися у стан рівноваги після зникнення зовнішніх сил, які вивели її з цього стану.
4) реакцію системи на задаючі та збурюючі впливи.
30. Вкажіть необхідну та достатню умову стійкості лінійної САК?
*1) Всі корені характеристичного рівняння мають бути лівими.
2) Всі корені характеристичного рівняння мають бути правими.
3) Всі корені характеристичного рівняння мають бути нульовими.
4) Всі корені характеристичного мають рівняння бути дійсними.
31. Вкажіть необхідну та достатню умову стійкості САК згідно алгебраїчного критерію стійкості Гурвіца?
1) Визначник Гурвіца та всі його діагональні мінори мають бути від’ємними.
*2) Визначник Гурвіца та всі його діагональні мінори мають бути додатними.
3) Визначник Гурвіца та всі його діагональні мінори мають бути нульовими.
4) Визначник Гурвіца та всі його діагональні мінори мають бути рівними між собою.
32. Вкажіть необхідну та достатню умову стійкості САК згідно частотного критерію стійкості Михайлова.
1) Необхідно щоб годограф характеристичного вектора при зміні частоти w від 0 до +¥, проходив через початок координат.
2) Необхідно щоб годограф розімкнутої системи не охоплював точку з координатами (-1; j0).
3) Необхідно та достатньо, щоб визначник Михайлова та всі його діагональні мінори були додатними.
*4) Необхідно щоб годограф характеристичного вектора при зміні частоти w від 0 до +¥, починаючись при w=0 на дійсній додатній півосі, обходив проти годинникової стрілки послідовно n квадрантів координатної площини ніде не перетворюючись на нуль, де n - порядок характеристичного рівняння.
33. Вкажіть необхідні та достатні умови стійкості САК згідно частотного критерію стійкості Найквіста?
1) Необхідно щоб годограф характеристичного вектора при зміні частоти w від 0 до +¥, проходив через початок координат.
*2) Необхідно щоб годограф розімкнутої системи не охоплював точку з координатами (-1; j0).
3) Необхідно та достатньо, щоб визначник Михайлова та всі його діагональні мінори були додатними.
4) Необхідно щоб годограф характеристичного вектора при зміні частоти w від 0 до +¥, починаючись при w=0 на дійсній додатній півосі, обходив проти годинникової стрілки послідовно n квадрантів координатної площини ніде не перетворюючись на нуль, де n - порядок характеристичного рівняння.
34. Як називається величина відрізка на вісі абсцис, що знаходиться між критичною точкою (-1;j0) та годографом АФЧХ розімкнутої системи?
1) Запасом стійкості за фазою.
|
|
Дата добавления: 2015-01-03; Просмотров: 552; Нарушение авторских прав?; Мы поможем в написании вашей работы!