КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Конструкція рульового керування
|
|
|
|
1. Рульове колесо.
2. Вал приводу рульового механізму.
3. Рульовий механізм.
4. Рульовий привод керованих коліс.
5. Посилювач рульового керування (насос з приводом, силовий пристрій, електродвигун з механізмом приводу).
6. Автоматичні електронні, локаційні, телематичні системи стабілізації руху та керування.

Рис 1. Рейкове рульове керування Toyota з електропосилювачем.
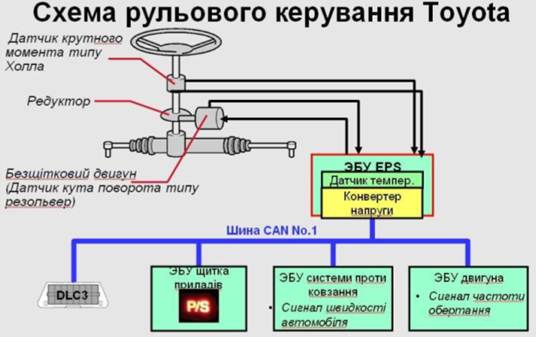
Рис 2. Схема рульового керування Toyota AURIS COROLLA.

Рис 3. Привод коліс автомобіля Auris Toyota.
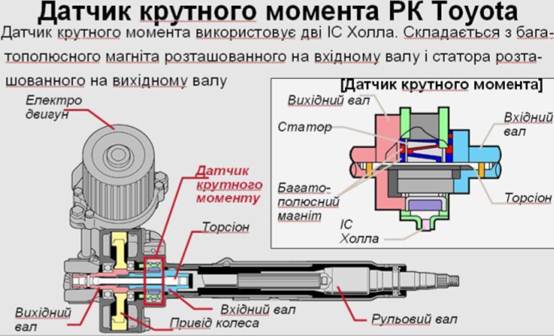
Рис 4. Датчик крутного моменту рульового керування Toyota.

Рис 5. Рейковий рульовий механізм без посилювача.
1-чехол, 2- вкладиш, 3- пружина, 4- палець,
6- кульовий шарнір, 7- рульова рейка.
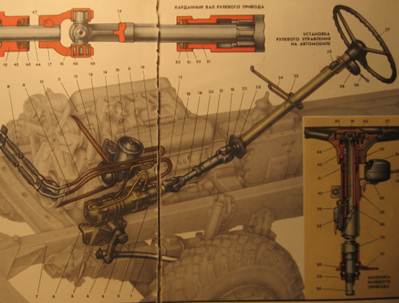
Рис 6. Рульове керування ЗІЛ-131.
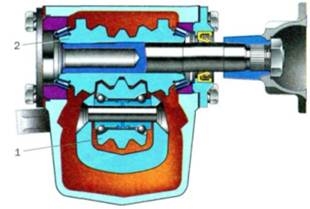
Рис 7. Рульовий механізм типу «глобоїдний
черв’як-ролик» без посилювача.
1- ролик, 2- черв’як.
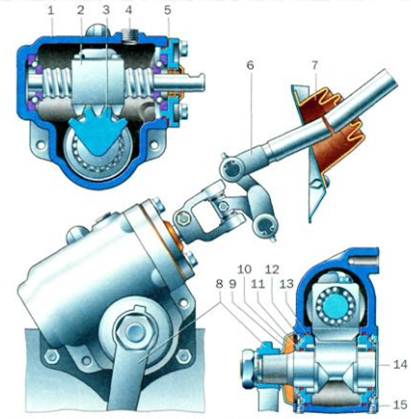
Рис 8. Рульові механізми типу «гвинт-гайка-рейка –
зубчатий сектор» без посилювача.
1- картер, 2- гвинт з кульовою гайкою, 3- вал-сектор,
4,15- пробки, 5- регулювальні прокладки, 6- вал,
7,10- ущільнювачі, 8- сошка, 9,14- кришки,
11,12,13- кільця.
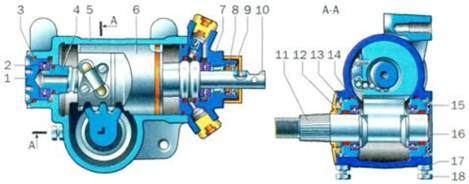
Рис 8а. Рульові механізми типу «гвинт-гайка-рейка – зубчатий сектор» без посилювача.
1,17- гайка, 2- підшипник, 3,13,14- кільця, 4- гвинт, 5- картер, 6- поршень-рейка, 7- гідравлічний розподільник, 8- манжета, 9- ущільнювач, 10- вхідний вал, 11- вал-сектор, 12,16- кришки, 13,14,15- кільця, 18- болт.
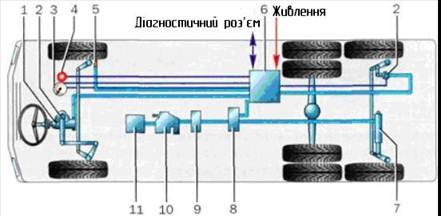
Рис 9. Рульовий привод передніх та задніх керованих коліс.
Рис 10. Способи повороту. а)- за рахунок повороту осі,
б)- за рахунок повороту керованих коліс, в- за рахунок
складання рами, г- силовим способом.
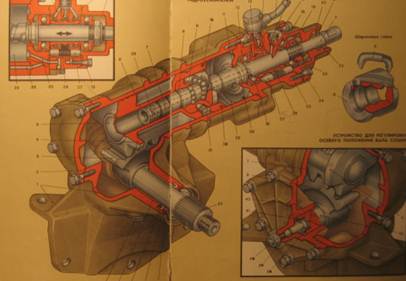
Рис 11. Рульовий механізм ЗІЛ-131 типу “гвинт-гайка-рейка-сектор “.
|
|
|
. 
Рис 12. Електрогідравлічний посилювач рульового керування.
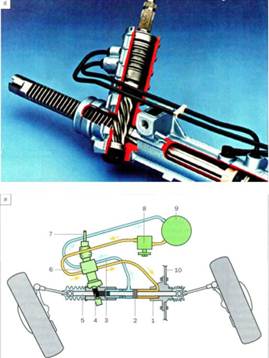
Рис 13. Рейковий рульовий механізм з гідропосилювач.
1,2- олива під високим та низьким тиском, 2- поршень, 4- шестерня, 5- рейка, 6- золотниковий пристрій, 7- рульова колонка, 8- насос гідро посилювача, 9- ємність для оливи, 10 – елемент підвіски.

Рис 14.Електричні посилювачі з передаванням зусилля на рульовий вал, на
шестерню рульового механізму та на рейку рульового механізму.
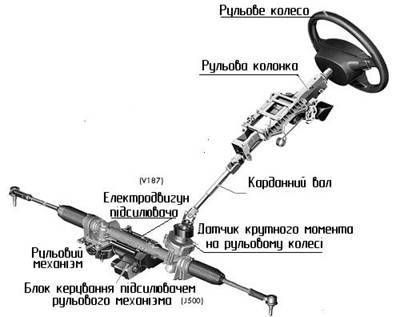
Рис 15. Електричний посилювач рульового керування автомобіля VW.

Рис 16. Електричний посилювач рульового керування Toyota.

Рис 17. Рульове керування автомобіля AXOR з гідро посилювачем.
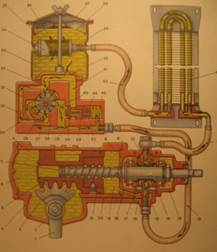
Рис 18. Схема роботи гідро посилювача ЗІЛ-131.
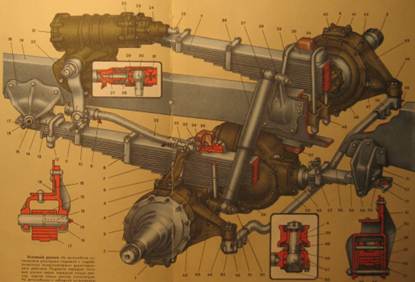
Рис 19. Привод керованих коліс ЗІЛ-131.
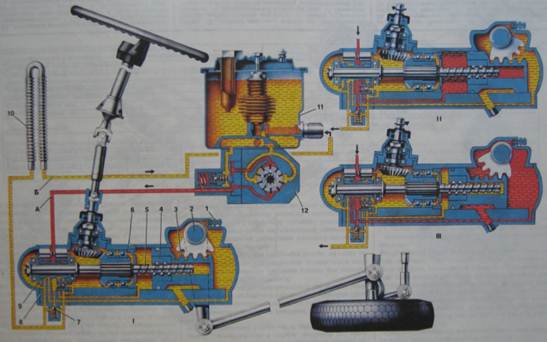
Рис 20. Схема рульового керування КАМАЗ-5320 з гідравлічним
посилювачем та рульовим механізмом типу “гвинт-гайка-рейка-сектор “.

Рис 21. Електронна система стабілізації траєкторії руху.
ESP.(Electronic Stability Programm).
1-блок керування АБС, 2- датчик швидкості обертання колеса, 3- датчик кута повороту руля, 4- датчик бокового прискорення та кутової швидкості, 5- лектронний блок керування, 6- електропривод керування подачі палива, 7- датчик тиску в гальмівній системі.
На деяких автомобіля БМВ встановлюється активна система керування передніми колесами AFS (Active Front Steering). Планується Steer by wire, тобто не буде жорсткого механічного зв’язку між водієм та колесами, а на кожне колесо свій електродвигун повороту колеса.
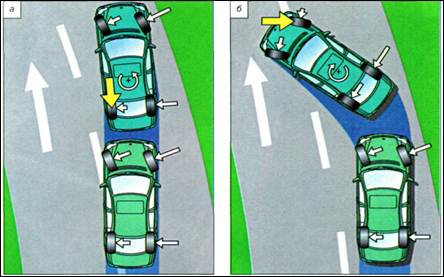
Рис 22. Керування в критичній ситуації. а)-при зносу, б)-при заносу.
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 1616; Нарушение авторских прав?; Мы поможем в написании вашей работы!