КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Відомості з історії розвитку ТАК
|
|
|
|
Тема 1. Вступ. Основні поняття та визначення теорії автоматичного керування
План
1.1. Відомості з історії розвитку ТАК.
1.2. Сутність проблеми автоматичного керування.
1.3. Предмет і задачі курсу ТАК. Основні поняття і визначення
1.4. Основні функціональні елементи системи автоматичного керування
Вважають, що автоматика є порівняно молодий напрямок розвитку науки й техніки. Однак відомо, що ідеї автоматики і нескладні автоматичні пристрої використовувалися ще в стародавні часи в Єгипті, Греції та інших країнах. Так, жерці Єгипту користувалися різними автоматичними пристроями при спорудженні пірамід і храмів.
Із середніх віків є відомості про «залізну людину» феодала Альберта Великого, яка виконувала функції швейцара — відчиняла і зачиняла двері приймальної зали.
Проте автоматичні пристрої того часу ще суттєво не впливали на загальний розвиток людства і його продуктивних сил.
 |
Першим автоматом, який мав помітний вплив на цивілізацію, був годинник. Для підвищення точності ходу годинників було розроблено відповідні «регулятори»: поплавковий — для водяних годинників (рис. 1.1,а) і маятниковий (рис. 1.1,б) (1675 р., юлландський фізик і математик X. Гюйгенс) – для механічних.
а) б)
Рис. 1.1. Регулятори ходу годинників: а) поплавковий; б) маятниковий
Інтенсивний розвиток автоматики почався в XVIII — XIX ст. у зв'язку з промисловим переворотом в Європі, пов'язаним з використанням енергії пари.
Першим промисловим «регулятором» того часу був поплавковий «регулятор», розроблений І. І. Ползуновим для «вогнедіючої машини» (парового котла),- яку він побудував у 1765 р. у м. Барнаулі.
На рис. 1.2. показано принципову спрощену схему машини Ползунова з поплавковим регулятором рівня води у паровому котлі К. При підвищенні витрат пари рівень води Н знижувався, поплавок П опускався і діяв на замикач 3, збільшуючи надходження води в котел. При зменшенні витрат пари надходження води в котел зменшувалось. Це давало змогу різко зменшити коливання рівня води в котлі та рівня тиску пари.
|
|
|
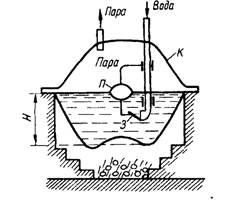
Рис. 1.2. Схема машини Ползунова
На принципі зміни керованих технологічних параметрів залежно від їх відхилення відносно заданого значення в 1784 р. англійський механік Дж. Уатт побудував відцентровий «регулятор» швидкості парової машини (рис. 1.3.).
Рис. 1.3. Регулятор Уатта
Як приклад автоматичного управління розглянемо роботу одного з перших технічних пристроїв, керуючих об'єктом автоматично - відцентрового регулятора для підтримки сталості ходу парової машини, винайденого англійським механіком Джеймсом Уаттом в 1784 г (див. рис.1.3).
Цей регулятор складається з двох вантажів 1, підвішених на шарнірах уздовж осі вертикального вала 2, пов'язаного через редуктор з вихідним валом парової машини 3. Важелі вантажів з'єднані з втулкою 4, яка може переміщатися уздовж вала 2. Втулка 4, в свою чергу, з'єднана важелем із заслінкою 5, положення якої визначає перетин отвору, через яке пар надходить з котла в циліндр машини.
При пуску машини її вихідний вал 3 приходить в обертання з круговою швидкістю ω, а кожен з вантажів починає відчувати вплив двох сил (див. малюнок): сили пружності важеля F (або її вертикальної і горизонтальної Fв Fг складових) і сили ваги P. Якщо величина ваги P, кут α і передавальне число редуктора підібрані такими, що при цьому Fв> P, то вантажі почнуть зміщуватися вгору і в сторони до тих пір, поки не наступить стан динамічної рівноваги, коли Fв = P. У результаті цього заслінка 5 приймає деякий положення, що відповідає певній швидкості.
Застосування наведеного регулятора забезпечує з певною точністю сталість швидкості ω незалежно від величини навантаження на валу машини і параметрів робочого пара. Так, наприклад, якщо з якої-небудь причини машина збільшить швидкість обертання, то відцентрова сила Fг також збільшиться, що призведе до зростання F а отже і Fв. Стан рівноваги порушиться і вантажі почнуть піднімати вище, що призведе до більшого закриття заслінки, зниження витрати пари і, отже, до зниження ω.
|
|
|
Парова машина не здатна стійко забезпечувати необхідний режим роботи, тобто не володіла «самовирівнюванням». Це викликало необхідність проведення відповідних теоретичних досліджень.
Принцип керування за відхиленням величини від заданого значення, відомий як принцип Ползунова - Уатта, дістав поширення в сучасній техніці.
Одним із фундаторів теорії автоматичного керування вважається професор Петербурзького практичного технологічного інституту І. О. Вишнєградський, який опублікував у 1876 і 1878 рр. свої класичні праці «Про загальну теорію регуляторів» та «Регулятори прямої дії». В них регулятор і робоча машина розглядались як єдина динамічна система.
Розробки П. Л. Чебишева дістали подальший розвиток у працях словацького вченого А. Стодола та австрійського математика А. Гурвіца. Приблизно в той час в Англії питанням автоматичного керування приділяли увагу англійські вчені Дж. Максвелл, Раус та ін. Важливий внесок у розвиток теорії автоматичного керування зробили американські вчені Толле і Трійка
Велике значення для розвитку теорії автоматичного керування мали дослідження академіка О. М. Ляпунова, який в 1892 р. у своїй праці «Загальна задача про стійкість руху» заклав основи теорії стійкості нелінійних динамічних систем, а також обгрунтував вихідні положення лінійної теорії автоматичного керування.
Важливою подією було опублікування М Є. Жуковським у 1909 р. першого російського підручника «Теорія регулювання ходу машин», в якому, крім узагальнення відомих положень, було наведено нові дослідження регулятора з сухим тертям, основи теорії переривчастого регулювання.
В XX ст. енергія пари дедалі більше замінювалась електричною енергією, і питанням автоматизації різних електроустановок приділялося більше уваги. У цей період виникають автоматичні електростанції, автоматизуються окремі промислові ділянки, цехи та цілі підприємства (наприклад, цементні заводи та ін.). Ставляться і вирішуються завдання комплексної автоматизації цілих промислових процесів і виробництв.
|
|
|
У подальший розвиток теорії автоматичного керування свій внесок роблять учені різних країн світу.
В 30-ті роки нашого століття з'являються нові, частотні, методи дослідження, які розроблялися в працях американського вчено- ю X. Найквіста, російського вченого А. В. Михайлова, німця Леонарда, англійця Принца та ін.
У 1946 р. Г. Боде та Л. Мак-Кол застосували в практичних цілях логарифмічні характеристики. Г. Браун, А. Холл, Д. Кемпбелл, Г. Чест-іііід, в. В. Солодовніков та інші вчені розробили зручні для інженерної практики методи та методики дослідження й синтезу систем автоматичного керування на основі частотних характеристик.
Великий внесок у розвиток нелінійної теорії автоматичного керування зробили О. О. Андронов, М. М. Крилов, М. М. Боголюбов, А. І. Лур'є, О. М. Льотов, І. М. Вознесенський, Л. С. Гольдфарб та ін.
В теорію синтезу нелінійних систем значний внесок зробив румунський вчений В. М. Попов.
Великою подією в розвитку ТАК була поява в 1948 і 1952 рр. праць американського вченого Н. Вінера, які стали основою нового напрямку розвитку ТАК – кібернетики (науки про загальні положення керування і зв'язок у різних системах). Великий внесок в її розвиток зробили українські вчені В. М. Глушков і О. Г. Івахненко та російські вчені А.І. Берг, А.М. Колмогоров.
На основі методів кібернетики було розроблено автоматизовані людино-машинні системи, що дістали назву «Автоматизовані системи керування» (АСК), у тому числі технологічні процеси (АСК-ТП), в яких широко застосовується електронна обчислювальна техніка.
Теорія автоматичного керування продовжує інтенсивно розвиватися, відповідаючи на нагальні потреби виробництва. Серед сучасних напрямків розвитку ТАК – теорія робототехнічних систем, гнучкі виробництва, багатовимірні екстремальні системи, теорія оптимального керування тощо.
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 863; Нарушение авторских прав?; Мы поможем в написании вашей работы!