КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Часові характеристики
Вступ
Тема. 4. Сигнали випробування САК
План
4.1. Вступ
4.2. Часові характеристики
4.3. Частотні характеристики
Під час аналізу реальних систем керування виникає питання експериментального визначення характеристик системи, характеристик її окремих ланок. Під час експериментального вивчення на систему подають певний сигнал і вимірюють, як вона реагує на нього. Залежно від реакції можна визначити, що являє собою система, які її характеристики. Вивчаючи окремі динамічні ланки, можна визначити тип динамічної. ланки та її параметри. Теоретичне вивчення САК також ґрунтується на експериментальних дослідженнях і результати цих досліджень покладені в основу теоретичного вивчення САК.
Для експериментального вивчення САК та окремих ланок потрібно, в першу чергу, вибрати випробувальний сигнал, який слід подавати на систему. Вимоги до сигналу такі:
сигнал повинен бути максимально простим в реалізації.
сигнал повинен бути максимально інформативним, тобто дозволяти визначити максимальну кількість параметрів системи.
Сигналів, які відповідають таким умовам, є декілька. Залежно від випробувальних сигналів розрізняють різні характеристики систем. У теорії інформацій, радіотехніці, електротехніці, теорії електричних кіл, в теорії електрозв’язку, радіозв’язку, в ТАК та в інших наукових дисциплінах. прийнято описувати системи двома різновидами характеристик, а саме:
часові характеристики,
частотні характеристики.
Часові характеристики– визначають поведінку системи в часі. На вхід системи подають випробувальний сигнал і вивчають зміну вихідного сигналу протягом певного проміжку часу. Часові характеристики подають у вигляді функцій часу, або у вигляді графіків залежності вихідного сигналу від часу, який пройшов з моменту початку подачі сигналу.
Для вивчення часових характеристик:
- ступінчатий,
- імпульсний,
- наростаючий з постійною швидкістю,
- наростаючий з постійним прискоренням.
У разі вивчення часових характеристик за допомогою осцилографів чи самописців використовують сигнали, які періодично повторюються, а саме сигнал типу меандр, трикутний сигнал, пилкоподібний та ін.
Розглянемо названі сигнали.
Одиничний ступінчастий вплив.
Сигнал рівний нулю до певного моменту часу t0, і рівний певній постійній величині починаючи з моменту часу t0. Це сигнал, який створює звичайний вимикач. Графічно такий сигнал показано на рис.4.1.
Цей вплив має вигляд одиничного стрибка. Його називають також одиничною функцією 1(t), яка набуває таких значень:
 (4.1)
(4.1)
Такому впливу відповідає, наприклад, збільшення навантаження в системах регулювання кутової швидкості електродвигуна, раптова зміна положення задавальної осі в слідкуючій системі, тощо.
Реакція системи на одиничний ступінчастий вплив за нульових початкових умов називається перехідною функцією h(t) системи; графік цієї функції називається перехідною характеристикою.
 Це дуже важлива характеристика системи: за нею можна судити про стійкість системи, її швидкодію.
Це дуже важлива характеристика системи: за нею можна судити про стійкість системи, її швидкодію.
Якщо відоме рівняння, що описує САК, перехідну функцію h(t) можна отримати, розв’язавши це рівняння за нульових початкових умов і прийнявши x(t)=1(t).
Одиничний імпульс (d-функція). Цей вплив являє собою дуже вузький імпульс, що обмежує одиничну площу (рис. 4.2). Тобто d-функція задовольняє умовам:
 (4.2)
(4.2)
За реальних умов вплив у вигляді d-функції має місце, наприклад, у випадку раптового входження літака в струмінь повітря, що рухається перпендикулярно траєкторії руху літака.
Іншими словами, за вплив одиничного імпульсу може бути прийнятий вплив імпульсу будь-якої форми і малої довжини порівняно з очікуваним часом перехідного процесу.
Реакція системи на одиничний імпульсний вплив за нульових початкових умов називається імпульсною перехідною функцією w(t) системи. Графік цієї функції називається імпульсною перехідною характеристикою.
Перехідна та імпульсна перехідна функції називаються часовими функціями. Між ними існує зв’язок:
 (4.3)
(4.3)
Аналогічно пов’язані між собою одинична функція та одиничний імпульс:
 (4.4)
(4.4)
Сигнал наростаючий з постійною швидкістю - це сигнал, величина якого змінюється постійно і швидкість зміни постійно. Вигляд сигналу показано на рис.4.3. У ТАК такі сигнали використовують для дослідження так званих астатичних систем, які ми розглянемо дещо пізніше. Сигнали такого типу часто використовують, наприклад в осцилографі для рядкової розгортки. Реалізувати такий сигнал повністю неможливо, не можемо ми збільшувати будь-яку величину до безконечності. Тому використовують пилкоподібний сигнал, сигнал вигляду, показаного на рис. 4.3 г). Цей сигнал у разі використання осцилографа дозволяє вивести на екран характеристику системи, яка кадр за кадром буде повторюватись і на екрані буде давати стійке зображення.
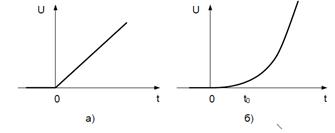
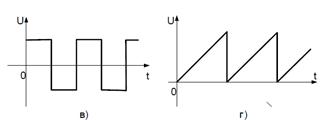
Рис. 4.3. Типи випробувальних сигналів
Сигнал наростаючий з постійним прискоренням - це сигнал, величина якого наростає з одним і тим же прискоренням. Вигляд його показано на рис.4.3, б). Використовують такий сигнал для дослідження астатичних систем.
Сигнал типу меандр - це сигнал, вигляд якого показано на рис. 4.3 в). Він використовується для виводу на екран осцилографа зображення характеристик системи при ступінчастому сигналі. Якщо сигнал меандр повторюється з частотою зміни кадрів, то на екрані осцилографа буде постійно зберігатись одне і те ж зображення, яке відповідає ступінчатому сигналу.
|
|
Дата добавления: 2014-12-25; Просмотров: 3521; Нарушение авторских прав?; Мы поможем в написании вашей работы!