КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура СПРК
|
|
|
|
Ку.
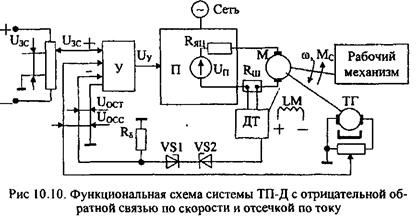
Обычно по условиям эксплуатации технологических установок и условиям коммутации на коллекторе двигателя необходимо ограничивать максимальный момент, развиваемый двигателем, на уровне (2+3)М„. С этой целью в замкнутых системах электропривода применяется задержанная отрицательная обратная связь по току якоря, называемая токовой отсечкой. Функциональная схема электропривода постоянного тока с отрицательной обратной связью по скорости и токовой отсечкой приведена на рис. 10.10. Токовая отсечка в этой схеме реализована на стабилитронах VS1 и VS2. Уравнения цепи обратной связи по току будет:

lame - ток якоря, при превышении которого вступает в действие отрицательная обратная связь по току;
иест - сигнал (напряжение) отрицательной обратной связи по току.
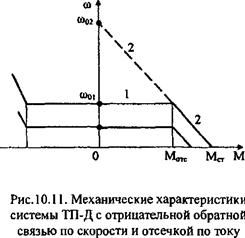
В результате совместного действия отрицательных обратных связей по скорости и току формируется механическая характеристика (см. рис. 10.11), которая состоит из двух участков: рабочего(1) с высокой жесткостью и участка (2) ограничения момента. На рабочем участке, пока не действует отрицательная обратная связь по току, механические характеристики описываются уравнением (10.4). При 1я>1отс работа электропривода может быть описана следующими уравнениями
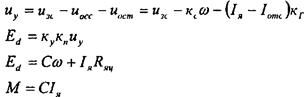
В результате решения этой системы уравнении относительно со получим уравнение механической характеристики для второго участка

Первые два слагаемых уравнения (10.6) определяют скорость идеального холостого хода механической характеристики для второго участка

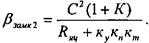
Жесткость механической характеристики на втором участке будет
-З.д.с. преобразователя Ud при работе двигателя с замкнутой системой управления не остается постоянной, а изменяется в соответствии с уравнением
|
|
|
На рабочем участке механической характеристики скорость примерно постоянна. С увеличением нагрузки на валу двигателя Ud возрастает. После перехода на второй участок и дальнейшем повышении нагрузки скорость снижается до нуля, наступает режим стопорения и уменьшается до величины
Таким образом, для формирования желаемой механической характеристики преобразователь должен иметь необходимый запас по величине Ed в соответствии с соотношением

В этой случае жесткость верхней механической
характеристики будет постоянной при всех нагрузках
вплоть до Мош.
В связи с расширением использования полупроводниковой техники управления и созданием унифицированных блочных систем регуляторов (УБСР), предназначенных для управления электроприводами, практический интерес представляет последовательная коррекция контуров регулирования. При подчиненном регулировании координат система электропривода разделяется на группы звеньев, в каждой из которых, как правило, имеется только одна большая постоянная времени. Каждая из таких групп звеньев включается в контур регулирования со своим регулятором и обратной связью. В результате система получается многоконтурной, причем каждый последующий контур охватывает предыдущий. Выходные величины регуляторов внешних контуров регулирования оказываются входными для внутренних контуров регулирования.
Требуемые показатели качества регулирования в оптимизированном контуре (колебательность и перерегулирование) обеспечиваются выбором отношения постоянных времени а, а быстродействие определяется только величиной суммарной некомпенсированной постоянной времени Тμ.
где  — суммарная некомпенсированная постоянная времени контура регулирования.
— суммарная некомпенсированная постоянная времени контура регулирования.
а=Т0 /Тμ=2
При а=2 обеспечивается время регулирования, то есть когда регулируемая переменная первый раз достигает установившейся величины, tp1 = 4,7 Тμ при перерегулировании меньшем 5 %. Полученный оптимум принято называть «техническим» или «модульным».
|
|
|
Настройка на модульный оптимум обеспечивает наилучшие показатели регулирования по каналу управления, но не обеспечивает быстрой реакции системы на возмущение. Таким образом, для компенсации влияний возмущений регулятор должен быть настроен на «Симметричный Оптимум» (а=Т0/Тμ=4). В этом случи регулируемая переменная первый раз достигает установившейся величины, tp1 = 3,1 Тμ
11. Синтез (настройка) регуляторов тока и скорости на «МО» в системах ТП-Д, ТВ-Г-Д (ТТВ≠0).
Требуемые показатели качества регулирования в оптимизированном контуре (колебательность и перерегулирование) обеспечиваются выбором отношения постоянных времени а, а быстродействие определяется только величиной суммарной некомпенсированной постоянной времени Тμ.
где — суммарная некомпенсированная постоянная времени контура регулирования.
а=Т0 /Тμ=2
При а=2 обеспечивается время регулирования, то есть когда регулируемая переменная первый раз достигает установившейся величины, tp1 = 4,7 Тμ при перерегулировании меньшем 5 %. Полученный оптимум принято называть «техническим» или «модульным».
Настройка на модульный оптимум обеспечивает наилучшие показатели регулирования по каналу управления, но не обеспечивает быстрой реакции системы на возмущение. Таким образом, для компенсации влияний возмущений регулятор должен быть настроен на «Симметричный Оптимум» (а=Т0/Тμ=4). В этом случи регулируемая переменная первый раз достигает установившейся величины, tp1 = 3,1 Тμ
Синтез регулятора тока:
При синтезе регулятора тока пренебрегаем влиянием внутренней обратной связи по ЭДС двигателя, что сказывается на точности регулирования тока, незначительно влияет на динамические показатели, но существенно упрощается синтез регулятора. При этом передаточная функция объекта регулирования КРТЯ примет вид:
Желаемая передаточная функция разомкнутого КРТЯ:
Передаточная функция регулятора тока:
то есть получена передаточная функция ПИ-регулятора:
|
|
|
с постоянной времени интегрирования: 
и коэфф. усиления пропорциональной части:
Kут=Тя /Тит
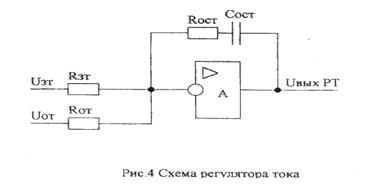
Параметры элементов и передаточной функции регулятора тока связаны следующими соотношениями:
Тит=RзтСост
Кут=Rост /Rзт
Тя=RостСост
Синтез регулятора скорости:
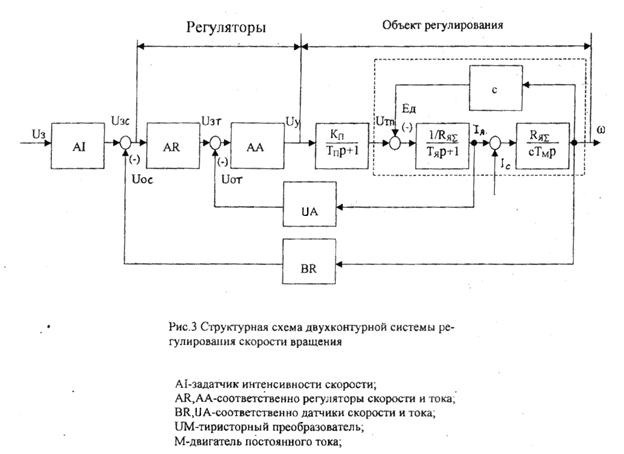
В соответствии с рис. 3 объект регулирования скорости состоит из замкнутого контура регулирования тока якоря и механического звена электропривода и имеет передаточную функцию:

где Тм=(RяΣ×JΣ)/c2 — электромеханическая постоянная времени электропривода;
 — постоянная двигателя, В×с;
— постоянная двигателя, В×с;
Rя.д — активное сопротивление якорной цепи двигателя, Ом.
Тм=(3,3×0,12)/0,772=0,67 с
Преобразуя передаточную функцию объекта регулирования скорости, пренебрегая членом, содержащим р2 вследствие малости его коэффициента, в передаточной функции замкнутого КРТЯ:
Желаемая передаточная функция разомкнутого контура регулирования скорости имеет вид:
 ,
,
где ас=Тос /Тμс — отношение постоянных времени в оптимизированном КРС.
Передаточная функция регулятора скорости:
Таким образом, получен пропорциональный регулятор скорости с коэфф. передачи:
 ,
,
где Rоос и Rзс — соответственно сопротивления резисторов цепи обратной связи и задающего входа усилителя (рис. 6).
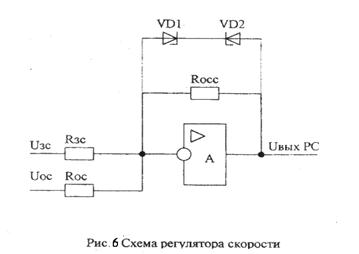
Коэфф. обратной связи приводится к цепи задающего сигнала:
Кос=КBRRзс /Rос,
где КBR=UBR /ωдв — передаточный коэфф. тахогенератора.
Для определения величины Кос необходимо задаться наибольшим входным напряжением задания по скорости Uзс.max, соответствующим заданной величине скорости идеального холостого хода двигателя. Эти параметры связаны между собой следующим соотношением:
Uзс.max=Kосω0
Уравнение статической электромеханической характеристики в системе подчиненного регулирования координат получим исходя из условия равенства напряжений задания по току якоря Uзт=(Uзс-Косω)Wpc(p) и обратной связи Uот=КотIя на входе регулятора тока. Тогда
 , или
, или
 ,
,
а в случае настройки обоих контуров регулирования на “модульный оптимум”, то есть при ас=ат=а=2, выражение примет вид:
|
|
|
Еще раз отмечаем, что контуры регулирования в системах подчиненного регулирования координат по управляющему воздействию являются астатическими, т.е. ошибки регулирования координат равны нулю (при Мс=0 ω0=Uзс /Кос=const и при Едв=сω=0 Iстоп=Uзт.max / Кот=const).
При действии возмущающего воздействия появляется статическая ошибка регулирования по скорости:
Статические электромеханические характеристики привода оптимизированного методом последовательной коррекции и настроенные на «модульный оптимум» приведены на рис. 8.
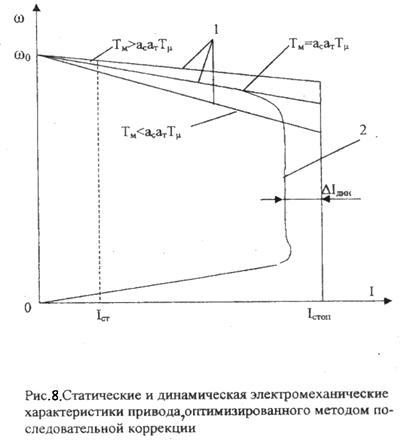
1 – статические характеристики
2 – динамическая характеристика
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 999; Нарушение авторских прав?; Мы поможем в написании вашей работы!