КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение подвижности механизмов
|
|
|
|
Для определения подвижности плоских механизмов следует пользоваться формулой Чебышева:
W = 3n – 2p5 – p4,
где W - степень свободы механизма;
n - число подвижных звеньев;
p1 - число низших кинематических пар (5 класса);
p2 - число высших кинематических пар (4 класса).
Раздел 2. Кинематический анализ плоских механизмов с низшими парами
Кинематический анализ Механизмов имеет своей целью изучение теории строения механизмов, исследование движения звеньев с геометрической точки зрения, независимо от сил, вызывающих движение этих тел.
Кинематическое исследование состоит в решении следующих задач:
1. Определение класса механизма, т. е. выяснение, из каких структурных групп состоит механизм, и в какой последовательности эти группы присоединяются к исходному механизму 1 класса.
2. Определение перемещений звеньев и траекторий, описываемых точками звеньев.
3. Определение скоростей отдельных точек звеньев и угловых скоростей звеньев.
4.Определение ускорений отдельных точек звеньев и угловых ускорений звеньев.
Пример: Дана схема (рис. 2.1), длины звеньев l O1A = 0,1 м, l AВ = 0,28 м, l ВО3 = 0,24 м, l СО3 = 0,18 м, l СD = 0,28 м, n = 400 об/мин. Исследование механизма производится в 10-м положении.
По рядок расчета:
1. Выбираем масштаб для построения кинематической схемы, определяемый по формуле
где l O1A = 0,1— истинная длина звена;
О1А = 50 мм — длина звена на чертеже.
2. В этом масштабе вычерчиваем планы механизма (рис. 2.1, а) в 12 равноотстоящих положениях кривошипа. За нулевое следует принять одно из крайних положений механизма. Для этого необходимо найти длины отрезков всех остальных
звеньев механизма, которые будут изображать их на чертеже:
|
|
|
и так далее.
Для того, чтобы найти правое крайнее положение механизма, нужно из точки О1; отрезком длиной 01А+АВ сделать засечку на дуге радиуса О3В. Получим точку В0 для нулевого положения. Затем найдем все остальные положения звеньев механизма. С помощью засечки длиной АВ—01А на дуге радиуса О3В определим левое крайнее положение точки В и обозначим ее через В3.
3. Производим структурный анализ. Так как заданный механизм плоский и относится к третьему семейству, то степень свободы механизма определяется по формуле Чебышева

где n — число подвижных звеньев, равное в данном механизме 5;
p5—число кинематических пар 5-го класса (низшие кинематические пары). В данном механизме их 7 (0—1, 1—2, 2—3, 3—4, 3—0, 4—5, 5—0);
р4—число кинематических пар 4-го класса (высшие кинематические пары), их в механизме нет. Тогда:

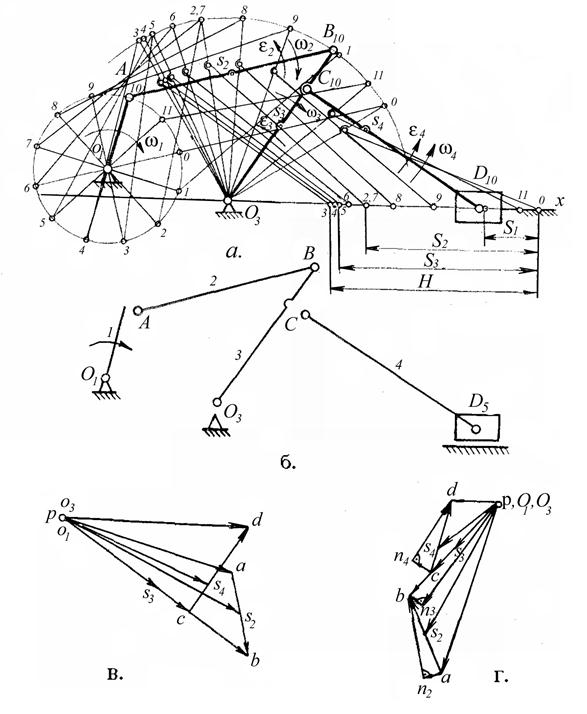
Рис. 2.1. Кинематическое исследование рычажного механизма методом планов:
а —кинематическая схема; б — группы Ассура; в — план скоростей; г — план ускорений
В данном механизме нет лишних степеней свободы и пассивных связей.
Проведем разложение механизма на структурные группы Ассура. Разложение следует начинать с отделения группы, наиболее отдаленной от ведущего звена. Разложение будет правильным, если после отделения каждой группы оставшаяся часть представляет собой кинематическую цепь с тем же числом степеней свободы, что и исходный механизм. Поэтому разложение необходимо начать с попытки отделения групп 2-го класса (двух-поводковых). В случае неудачи следует отделить группу 3-го класса или 4-го класса.
На рис. 3.1,б показано разложение механизма на структурные группы. Формула строения механизма имеет вид 1(0,1)®221 (2,3)®222 (4,5), т. е. к исходному механизму
1-го класса (звенья 0,1) присоединяются группы Ассура 2-го класса, состоящие из звеньев 2 — 3 (2-го порядка, 1-го вида) и 4— 5 (2-го порядка, 2-го вида). По классификации Ассура-Артоболевского данный механизм является механизмом 2-го класса. Структурный анализ механизма всегда предшествует кинематическому исследованию.
|
|
|
Кинематическое исследование механизма необходимо начинать с механизма 1-го класса, т. е. с ведущего звена. Задачи кинематического и силового исследования механизма в каждом положении его ведущего звена решаются для каждой группы Ассура отдельно, согласно формуле строения.
Рассмотрим построение кинематических диаграмм. По найденным на планах механизма (рис. 2.1,а) положениям ведомого звена 5 вычерчиваем график перемещения ползуна D (рис. 2.2,а), начиная от крайнего правого положения. Так как по условию w1=const, то ось абсцисс является не только осью углов (j поворота кривошипа, но и осью времени t).
Время оборота ведущего звена (кривошипа O1A) в секундах, найдем по формуле

Это время рекомендуется изображать на оси абсцисс отрезком
x = 0—12 = 120...180 мм; тогда масштаб времени, с/мм

Масштаб перемещений, откладываемых по оси ординат, берем таким же, что и масштаб длины на схеме механизма, или изменяем.
Дифференцируя график перемещений, получим график изменения скорости ведомого звена. Дифференцирование проводим графически методом хорд.
Последовательность построения графика VD = VD (t) (рис.2.2,б):
1. Проводим секущие (хорды) 0a, аb, bс, сd, df и т. д.
2. Выбираем полюс рv на расстоянии Hv, которое рекомендуется брать порядка 20...40 мм, и проводим из него лучи 1, 2, 3, 4 и т. д., параллельные секущим 0a, аb, bс, сd, df и т.д., до пересечения с осью ординат.
3. Из точек пересечения 1, 2, 3 и т. д. проводим горизонтали до пересечения с вертикальными прямыми, проведенными из середин 0—1, 1—2 и т. д. отрезков времени Dt.
4. Точки пересечения 1', 2', 3', 4' и т. д. соединяем плавной кривой. Это будет кривая изменения скорости ведомого звена.
5. Вычисляем масштаб скорости, мс-1/мм,
где w1 - угловая скорость звена 1,

ms — масштаб перемещений;
mt — масштаб времени;
Hv—полюсное расстояние, мм.
Масштаб графика скорости зависит от выбора полюсного расстояния. Чем больше полюсное расстояние, тем меньше численный масштаб и тем большие ординаты имеет график скорости. Начальная и конечная точки графика за период цикла движения механизма должны иметь одинаковые ординаты (в данном случае они равны нулю).
|
|
|
Аналогичным способом получим кривую ускорения (рис.2.2,в), дифференцируя график скорости. График ускорения, построенный путем графического дифференцирования кривой графика скорости, изображает закон изменения лишь касательного ускорения. Только в случае прямолинейного движения точки, когда нормальное ускорение равно нулю, построенный график отобразит (как в нашем примере) закон изменения полного ускорения. Начальная и конечная точки графика ускорения за время цикла движения механизма должны иметь одинаковые ординаты.
Масштаб графика ускорений, мс-1/мм, определяется по формуле
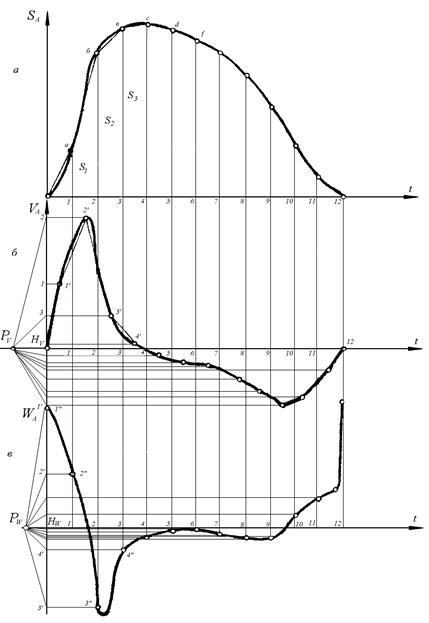
Рис. 2.2. Кинематические диаграммы
Рассмотрим построение плана скоростей для 10-го положения (рис. 2.1,в).
Величина скорости точки A, м/с, перпендикулярной кривошипу 01A, определяется по формуле
 (2.1)
(2.1)
 .
.
Для построения плана скоростей выбираем на плоскости произвольную точку р — полюс плана скоростей, который является началом плана скоростей. Из полюса откладываем отрезок рa, изображающий на плане скоростей вектор скорости VA. Он перпендикулярен звену 01А.
Тогда масштаб плана скоростей, мс-1/мм
 (2.2)
(2.2)
Рассмотрим первую группу звеньев (звенья 2 и 3).
Для определения скорости точки В напишем два векторных уравнения согласно теореме о сложении скоростей при плоскопараллельном движении:
 (2.3)
(2.3)
 (2.4)
(2.4)
Векторы относительных скоростей VВA и VBO3 известны только по направлению. Вектор относительной скорости VВA перпендикулярен звену AВ, а вектор VВОЗ — звену О3В.
Точка О3 неподвижна, поэтому V03=0. Таким образом, рассматриваемая группа присоединена к двум точкам, скорости которых известны и по направлению, и по величине.
В соответствии с векторным уравнением (2.3) на плане скоростей проводим через точку (а) прямую, перпендикулярную звену AВ. Это есть линия вектора VBA. В соответствии с векторным равенством (2.4) проводим через точку О3 на плане скоростей прямую, перпендикулярную звену O3B. Это будет линия вектора VВОЗ. Точка (в) пересечения этих двух прямых и будет определять конец вектора, изображающего на плане скоростей вектор Vв. Чтобы определить истинную величину любого из векторов в м/с, надо его длину умножить на масштаб плана скоростей.
|
|
|
Например,


Для определения скорости точки С воспользуемся тем, что картина относительных скоростей образует на плане скоростей фигуру, подобную фигуре звена и повернутую относительно ее на 90° в сторону вращения звена. В соответствии с этим отрезок рb плана скоростей разделим в отношении О3В: O3C, т. е.

Откуда 
Величина скорости точки С, м/с

Перейдем к группе (звенья 4 и 5).
Для определения скорости точки D напишем векторные уравнения
 (2.5)
(2.5)
 (2.6)
(2.6)
Вектор относительной скорости VDC и вектор абсолютной скорости VD не известны по величине, но известны по направлению. В соответствии с векторным уравнением через точку С на плане скоростей проводим прямую, перпендикулярную звену CD. Это будет линия относительной скорости, где далее проводим линию параллельно направляющей
Х-Х. Точка d, пересечения этих прямых и есть искомая точка. Истинная величина скорости точки D, м/с
Определим угловые скорости. Угловая скорость звена 2, рад/с, определяется по формуле
 (2.6)
(2.6)
Чтобы определить направление угловой скорости w2, следует вектор относительной скорости VBA перенести в точку В механизма, а точку A мысленно закрепить. Тогда вектор VBA будет стремиться вращать звено 2 по ходу часовой стрелки. Это и будет направление угловой скорости w2
Остальные угловые скорости:
 (2.7)
(2.7)
 (2.8)
(2.8)
Угловая скоростьw3 направлена по часовой стрелке, w4 — против.
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 3676; Нарушение авторских прав?; Мы поможем в написании вашей работы!