КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнение кинематического баланса привода
|
|
|
|
Числа зубьев шестерен.
Группы передач.
Иллюстрация схемы.
Кинематическая схема привода.
Иллюстрация кинематической схемы исследуемого узла приведена на рис.1.
Исследуемый узел включает в себя валы: I, II, III, IV, V, VI, VII, VIII, IX, X, XI, XII, XIII;
Шестерни и зубчатые колеса z1, z2, z3, … - z30; червяки K1 и K2; рейка t1.
В приводе имеются следующие группы передач:
a – расположена между валами II и III, включает в себя два поочередно вводимых в зацепление блока (z3, z5) и (z7, z9) на четыре скорости.
b - расположена между валами III и IV, на две скорости.
c - расположена между валами V и VI, на две скорости.
Обозначим число скоростей в группе a – Pa = 4; b – Pb = 2; c – Pc = 2.
Согласно паспортных данных [1] исследуемого станка запишем числа зубьев, шаги и пр. параметры каждого элемента кинематической цепи привода [табл.1].
Таблица 1.
| z1 = 38 | z10 = 33 | z19 = 28 | z28 = 22 |
| z2 = 57 | z11 = 24 | z20 = 43 | z29 = 44 |
| z3 = 22 | z12 = 48 | z21 = 54 | z30 = 22 |
| z4 = 44 | z13 = 32 | z22 = 32 | K1 = 2 |
| z5 = 26 | z14 = 25 | z23 = 36 | K2 = 1 |
| z6 = 40 | z15 = 50 | z24 = 18 | t1 = p × 8 |
| z7 = 29 | z16 = 20 | z25 = 36 | |
| z8 = 37 | z17 = 64 | z26 = 30 | |
| z9 = 33 | z18 = 56 | z27 = 30 |
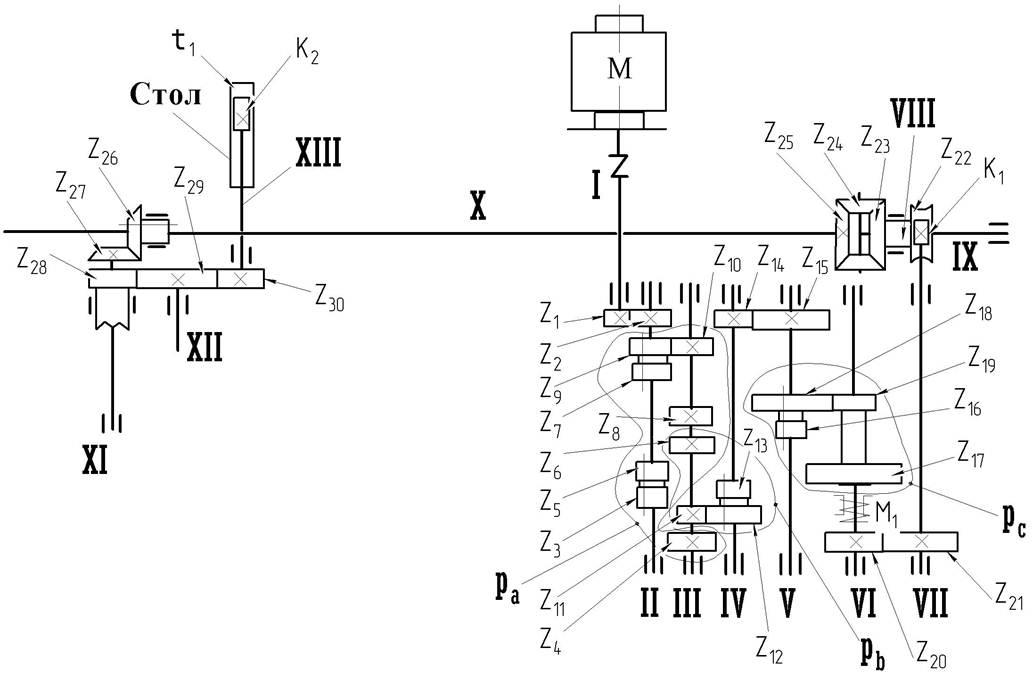
Рис.1 Кинематическая схема



|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 828; Нарушение авторских прав?; Мы поможем в написании вашей работы!