КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматизации проходческих работ буровзрывным способом
Процесс проведения горных выработок буровзрывным способом состоит из нескольких операций таких как:
· обуривание забоя в соответствии с паспортом бурения шпуров;
· зарядка и взрывание этих шпуров;
· погрузка и транспортировка отбитой горной массы.
Из всех перечисленных операций в настоящее время только обуривание забоя может быть успешно автоматизировано. Обуривание забоя это операция, по которой в горном массиве пробуриваются (сверлятся) специальные отверстия (шпуры), в которые затем помещается взрывчатка. Бурение шпуров выполняют специальные машины, которые называют буровыми каретками.
Система автоматического управления буровой кареткой должна выполнять две функции:
· автоматическую установку буровой машины в нужную точку забоя, которая определена паспортом буровзрывных работ;
· автоматическое управление буровой машиной в процессе бурения шпура.
9.2.1. Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
1. Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом ведения буровзрывных работ.
2. Автоматическое забуривание шпуров на соответствующих режимах бурения.
3. Автоматический переход от режима забуривания на режим нормального бурения на заданную глубину.
4. Автоматическое отключение подачи и ее реверсирование при достижении заданной глубины бурения без отключения буровой машины.
5. Автоматическое отключение всех приводов при установке буровой машины в исходное положение.
6. Автоматическое задание нового очередного положения шпура.
7. В случае необходимости обеспечение возможности перехода на ручное управление.
9.2.2. Автоматизация установки буровой машины в нужную точку забоя
Автоматическая установка буровой машины в нужную точку забоя в соответствии с паспортом буровзрывных работ производится роботом манипулятором, который может быть установлен на самоходное шасси буровой машины или на шасси погрузочной машины. Схема такой установки показана на рис. 51. На этой схеме к корпусу погрузочной машины 1 крепится робот- манипулятор 3, на котором устанавливается буровая машина 2.
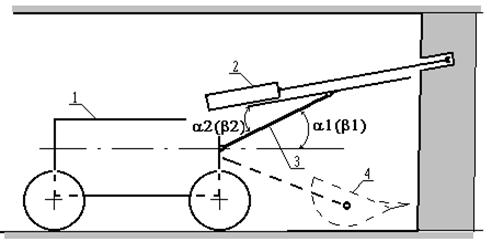 |
Рис. 51. Схема робота-манипулятора буровой машины, установленного на
шасси погрузочной машины с помощью.
Робот манипулятор определяет положение буровой машины относительно груди забоя. Для каждого положения буровой машины относительно груди забоя паспортом ведения буро-взрывных работ определяются значения четырех параметров α1, β1, α2, β2. Величина этих параметров определяет положение шпуров на плоскости (груди) забоя.
Параметры α1, β1 определяют угловое положение (в вертикальной α1 и горизонтальной β1 плоскости) корпуса манипулятора 3 относительно продольной оси буровой каретки (погрузочной машины 1). Параметры α2, β2 определяют в том же соответствии угловое положение продольной оси буровой машины 2 относительно продольной оси манипулятора 3.
Система автоматического управления процессом установки буровой машины в нужной точке забоя реализуется в микропроцессорном варианте. Структура такой системы показана на рис.54. Для управления роботом-манипулятором предусмотрены два модуля один из них модуль аналогового ввода, а другой дискретного вывода. К модулю аналогового ввода подключены датчики углового положения Дα1, Дβ1 и Дα2, Дβ2, а к модулю дискретного вывода подключены электрогидроклапаы ЭГК1, ЭГК2, ЭГК3, ЭГК4, ЭГК5, ЭГК6, ЭГК7, ЭГК8, управляющие гидроцилиндрами манипулятора. Работа модулей управления манипулятором по установке буровой машины в нужную точку забоя определяется подпрограммой, входящей в состав общей программы управления работой буровой машины. Структура алгоритма этой подпрограммы приведена на рис. 52.
 |
Рис.52. Структура алгоритма подпрограммы управления роботом-манипулятором.
Первой командой этого алгоритма производится включение электрогтдроклапана ЭКГ1, который перемещает манипулятор, при этом меняется его угловое положение по параметру α1. Следующей командой производится циклический опрос датчика Дα1, регистрирующего параметр α1. После чего определяется рассогласование Δα1 между фактическим и заданным значением этого параметра. В случае если параметр Δα1 = 0 то происходит выключение всех работающих приводов и делается переход к той части алгоритма, в которой производится отработка следующего углового параметра α2. Если указанное отклонение не равно нулю, то в зависимости его от величины и знака включается соответствующий привод, перемещающий манипулятор в сторону уменьшения до нуля контролируемой величины этого отклонения. При нулевом значении этого отклонения подпрограмма переходит к аналогичному регулированию следующих угловых параметров (β1, α2, β2). После отработки всех заданных параметров происходит выход из этой подпрограммы и возврат в исходную программу управления работой буровой машины.
9.2.3. Автоматизация управления буровой машиной.
В состав буровой машины входят: ударник, вращатель и механизм подачи этой машины на забой с приводом этого механизма. Для удаления продуктов бурения (буровой мелочи) из шпура используется вода, которая подается в шпур через водяной кран по каналам в буровой машине. Для контроля параметров бурения используется система датчиков, а управление буровой установкой производится системой пускателей. Функциональная структура такой системы представлена на Рис.53
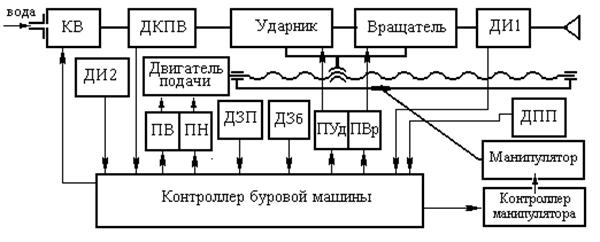 |
Рис 53. Структура системы управления бурением шпуров.
. В ее состав входят следующие элементы:
КВ – кран водяной;
ДКПВ – датчик крана пуска воды;
ДИ1 – датчик ударно-вращательных импульсов;
ДИ2 – датчик импульсов привода подачи;
ДЗП – датчик заднего положения буровой машины;
ДПП – датчик переднего положения буровой машины;
ДЗб – датчик забуривания;
ПВ – пускатель подачи вперед;
ПН – пускатель подачи назад;
Пуд – пускатель ударника;
ПВр – пускатель вращателя.
Принцип работы этой системы состоит в следующем: Перед пуском в работу буровой машины открывается водяной кран для подачи воды в шпур. Эта подача контролируется датчиком ДКПВ, только после срабатывания которого пускаются в работу ударник, вращатель и механизм подачи самой машины на забой. Первоначально эта подача выполняется в режиме забуривания, которая характеризуется малым усилием подачи. Продолжительность этого режима контролируется датчиком ДЗб. Как только сработает этот датчик, механизм подачи переключается на нормальную подачу. Процесс бурения шпура контролируется импульсными датчиками ДИ1 и ДИ2, и продолжается до тех пор, пока не сработает датчик ДПП. После его срабатывания, реверсируется подача буровой машины. При этом для предотвращения заклинивания бурового инструмента ударник и вращатель не отключаются. Обратное движение бурового инструмента продолжается до срабатывания датчика ДЗП. При срабатывании этого датчика отключаются все приводы и перекрывается подача воды. Далее управление передается роботу-манипулятору для установки буровой машины в новое положение.
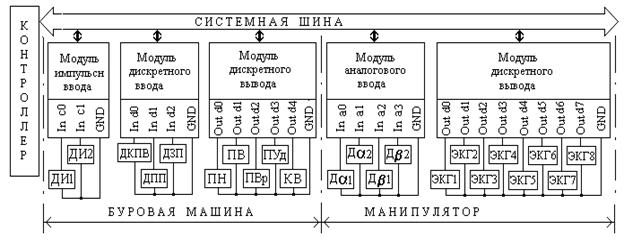 |
Система автоматического управления процессом бурения как и установки буровой машины реализуется в микропроцессорном варианте. Структура такой системы в общем виде показана на рис.54.
Рис. 54. Структура микропроцессорной системы управления буровой машиной и ее манипулятором.
Эта система выполнена в модульном исполнении. Функциональные модули этой системы объединены с контроллером через системную шину (возможно применение шины типа «ISA»). Условно модули делятся на две группы. Модули первой группы обслуживают работу буровой машины, а модули другой группы обслуживают работу манипулятора.
В первой группе модулей для ввода сигналов датчиков используются модули импульсного и дискретного ввода, к которым соответственно подключены импульсные датчики и датчики контроля пука води, а так же положения буровой машины относительно забоя. К модулям дискретного вывода подключены все пусковые устройства буровой машины. Все модули управляются с помощью внутренних команд, подаваемых контроллером через системную шину. Общее управление процессом бурения шпуров производится программой, структура алгоритма которой представлена на рис. 55.
После запуска этого алгоритма производится ввод в память контроллера расчетных угловых параметров положения манипулятора для каждого шпура в соответствии с паспортом ведения буровзрывных работ. Кроме того, одновременно вводится параметр N, равный числу буримых шпуров. Установка манипулятора начинается с первого шпура, поэтому параметру I -счетчику шпуров присваивается значение 1. После этого производится обращение к ранее описанной подпрограмме управления работой манипулятора, структура которой приведена на рис.52.
 |
Рис.55. Алгоритм общего автоматического управления буровой машиной.
После выхода из этой подпрограммы производится обращение к другой подпрограмме, которая управляет работой буровой машины. Структура этой подпрограммы приведена на рис.56. Выход из этой подпрограммы производится по окончанию рабочего цикла бурения очередного шпура, поэтому следующим оператором общего алгоритма параметр I. увеличивается на единицу, а это означает переход к следующему шпуру. Затем производится анализ суммарного значения этого параметра. Если суммарный параметр I окажется меньше числа N, то по этому условию производится циклический возврат к подпрограмме установки буровой машины к месту бурения очередного шпура, в противном случае дается команда для остановки алгоритма, так как в этом случае забой будет полностью обурен
Для управления рабой буровой машины используется отдельная подпрограмма, структура алгоритма коорой показана на Рис.56. Первым оператором этой подпрограммы производится включение крана пуска воды, после чего в цикле опрашивается состояние датчика ДКПВ. Пуск буровой машины произойдет только тогда, когда датчик ДКПВ зарегистрирует наличие воды в ее каналах буровой машины. Только после срабатывания этого датчика следующим оператором алгоритма включаются ударник и вращатель, а двигатель подачи запускается в режим забуривания. В этом режиме работы обеспечивается минимальное усилие подачи бурового инструмента на забой. После включения буровой машины производится циклический опрос датчика забуривания (ДЗ), который срабатывает только тогда, когда шпур достигнет заданной глубины забуривания.
 |
Рис.56. Подпрограмма управления буровой машиной.
Срабатывание датчика ДЗ переключает работу привода подачи на рабочий режим, после чего бурение производится на максимальных режимах. В течении этого режима производится циклический опрос датчика ДПП. Как только шпур достигнет заданной глубины, датчик ДПП сработает, после чего выключается ударник и реверсируется подача без отключения вращателя. Вращение бурового инструмента при реверсе предотвращает его заклинивание.
При обратном движении бурового инструмента производится циклический опрос датчика заднего положения ДЗП. Он сработает только тогда, когда буровая машина вместе с буром возвратится в исходное положение. Срабатывание датчика ДЗП формирует команду на отключение всех приводов, что означает конец цикла работы буровой машины., Следующей командой алгоритма производится выход из подпрограммы и возврат в основную программу управления процессом бурения шпуров.
|
|
Дата добавления: 2014-12-26; Просмотров: 3017; Нарушение авторских прав?; Мы поможем в написании вашей работы!