КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматизация процесса конвейерного траспорта
|
|
|
|
В соответствии с технологией транспортировки полезного ископаемого конвейерным транспортом по шахтным выработкам шахтные конвейеры делятся на:
· Стационарные;
· Полустационарные;
· Передвижные.
К стационарным относятся такие конвейерные линии, которые проложены по капитальным выработкам и срок службы их равен сроку службы этих выработок.
Полустационарные конвейерные линии прокладываются по участковым выработкам. Срок службы их согласуется со сроком службы этих выработок.
Передвижные конвейерные линии прокладываются в местах сопряжения участковых транспортных щтреков с лавой.
По структуре конвейерные линии бывают не разветвленными и разветвленными. В линиях последнего типа выделяются конвейера главного направления (магистральные) и конвейера маршрутных ответвлений или (маршруты).
Несмотря на различное назначение шахтных конвейерных линий к системам автоматического управления их работой предъявляются обще требования
10.1. Требования к системам автоматизации конвейерного транспорта.
Системы автоматического пралния конвейерными линиями должны обеспечивать:
1. Обеспечение возможности управлении конвейерами в конвейерной линии с центрального пульта управления, с пункта загрузки конвейеров или в режиме местного управления каждым из конвейеров.
2. Последовательный пуск конвейеров в порядке обратном направлению транспортирования груза.
3. Автоматическую подачу предупредительного звукового и светового сигнала перед запуском конвейерной линии, которая бы была отчетливо слышна на всем ее протяжении конвейерной линии в течение не менее 5 сек.
4. Включение каждого последующего конвейера в линии после установления рабочей скорости тягового органа предыдущего конвейера.
|
|
|
5. Оперативное отключение конвейеров с пульта управления.
6. Экстренное отключение и экстренное прекращение пуска любого конвейера с любой точки конвейерной линии.
7. Автоматическое отключение всех конвейеров, транспортирующих груз на остановившийся конвейер, а для скребковых конвейеров остановку конвейера, на который транспортируется груз во избежании захвата оборвавшейся цепи.
8. Пуск любого маршрута с центрального пульта управления или с места загрузки конвейеров.
9. Оперативную остановку части любого маршрута с центрального пульта управления или с места загрузки конвейеров без отключения конвейеров главного направления.
10. Дозапуск части любого маршрута с центрального пульта управления или с места загрузки конвейеров без отключения конвейеров главного направления.
11. Автоматическое, аварийное отключение привода конвейера при неисправности тягового органа, при затянувшемся пуске или снижении скорости рабочего органа ниже 75% от номинального значения.
12. Блокировку от повторного дистанционного включения остановившегося конвейера с центрального пульта управления или при работе в режиме местного управления.
13. Обеспечение возможности перевода на любой вид управления любого конвейера без нарушения режима автоматизации остальных конвейеров.
10.2. Принципы автоматизации пуска конвейерных линий.
Автоматический запуск конвейерной линии может осуществляться двумя способами:
· Запуск каждого конвейера через установленный промежуток времени, который контролируется реле времени;
· Запуск каждого последующего конвейера в линии, после того как предыдущий конвейер достигнет номинальной скорости своего тягового органа.
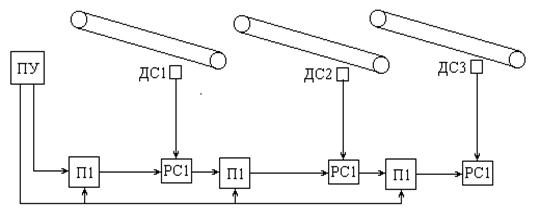 |
Второй способ запуска конвейерной линии более предпочтителен, т.к. степень загрузки конвейеров автоматически определяет продолжительность запуска всей линии. Технологическая схема запуска конвейеров по этому способу представлена на рис. 57.
|
|
|
Рис.57. Схема последовательного запуска конвейеров в режиме контроля скорости рабочего органа.
Команда на запуск конвейерной линии по этой схеме подается с пульта управления ПУ. При этом формируются два сигнала. Один из них непосредственно подается на пускатель привода первого конвейера П1 а другой является общим для всех приводов конвейеров в линии. Только при наличии дух этих сигналов привод конвейера может быть запущен. Второй сигнал на запуск каждого последующего конвейера (кроме первого) поступает с реле скорости РС предыдущего конвейера, которое срабатывает только тогда, когда скорость рабочего органа этого конвейера превысит 75% от ее номинального значения. При аварийной остановке одного из конвейеров отключается его реле скорости, поэтому пропадает второй сигнал на пускателе привода последующего конвейера. Вследствие этого, он и все последующие конвейеры останавливаются. Принципиально этот способ автоматического управления используется в большинстве систем управления конвейерами, в том числе и в аппаратуре типа АУК.
10.3. Структура и принцип работы системы автоматического управления конвейерной линией в аналоговом варианте
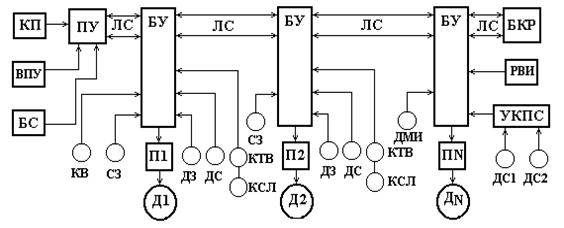 |
Структуру системы автоматического управления конвейерной линией в аналоговом варианте рассмотрим на примере аппаратуры типа АУК, которая показана на рис.58.
Рис.58. Структурная схема аппаратуры автоматического управления конвейерной линией типа АУК.
В схему этой структуры введены следующие обозначения:
КП – кнопка «пуск»;
ВПУ – выносной пульт управления;
БС – блок сигнализации звуковой;
ПУ – пульт управления;
БУ – блок управления;
П1,П2,…ПN – пускатели конвейеров;
Д1,Д2,…ДN – двигатели приводов конвейеров;
КВ – конечный выключатель;
СЗ – сирена звуковая;
ДЗ – датчик заштыбовки (завала) конвейера;
ДС – датчик скорости рабочего органа конвейера;
КТВ – кабель-тросовый выключатель;
КСЛ – датчик схода ленты;
ДМИ – датчик магнитно-импульсный;
|
|
|
БКР – блок концевого реле;
РВИ – реле времени;
УКПС – устройство контроля проскальзывания ленты;
ЛС – линия связи.
Структурно аппаратура АУК состоит из пульта управления ПУ к оторому подключены кнопки пусковые КП, выносной пульт управления ВПУ и блок сигнализации БС. Пульт управления через линию связи ЛС объединяет все блоки управления конвейерами. Блоками управления конвейеров БУ через соответствующие пускатели Пi управляю приводами соответствующих конвейеров.
К каждому блоку управления подключаются датчики и исполнительные устройства.
Сирена звуковая включается блоком сигнализации перед запуском конвейерной линии. Датчики скорости генераторного типа ДС для ленточных конвейеров и магнитно-импульсный датчик ДМИ для цепных конвейеров контролируют скорость рабочего органа конвейеров. Датчик заштыбовки ДЗ останавливает привод конвейера в случае его завала грузом предыдущего конвейера. Аналогичное происходит при срабатывании датчика схода ленты КСЛ. Кабель-тросовые выключатели КТВ позволяют обеспечить аварийную остановку конвейерной линии с любой точки ее маршрута. Для этого необходимо натянуть трос, который разомкнет контакты этого датчика. Реле времени РВИ позволяет одному из конвейеров в линии запускаться с установленной выдержкой времени или аналогично отключатся. Устройство УКПС позволяет контролировать степень проскальзывания ленты по барабану. Для этой цели устройство сравнивает сигналы двух датчиков скорости ДС1 и ДС2. Один из них контролирует скорость барабана, а другой скорость ленты. В случае если разность между сигналами этих датчиков превысит заданное значение, устройство отключит провод конвейера.
Конвейерная линия может запускаться с пульта управления пусковой кнопкой или с соответствующей кнопки выносного пульта управления Первым всегда запускается конвейер на разгрузочном пункте, а последним на загрузочном. Это предотвращает завал транспортируемым грузом неработающие конвейеры.
После того как при пуске скорость рабочего органа первого конвейера будет выше 75% от ее номинального значения по линии связи «ЛС» подается сигнал на запуск последующего конвейера. В случае аварийной остановки одного из работающих конвейеров в линии связи прерывается связь с блоками управления всех последующих конвейеров, и их приводы сразу останавливаются. Принцип работы аппаратуры АУК можно проследить на ее принципиальной схеме, представленной на рис.59.
|
|
|
При нажатии на кнопку «пуск» к выпрямительному мосту этой схемы подключается обмотка управления реле К1, которое включается и своим контактом подает питание на блок реле времени БРВ. Это реле в свою очередь включает два реле КТ и К2. Контактами реле К2 включается цепь питания блокf сигнализации БС, которое одновременно включает звуковые сирены в блоках управления всех конвейеров.
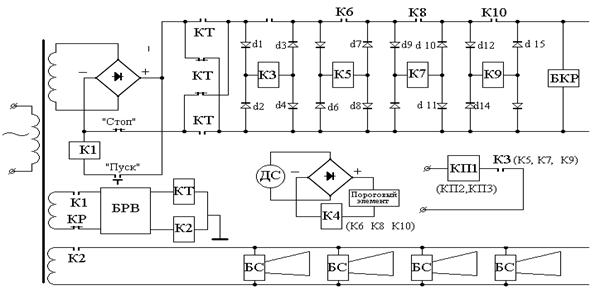 |
Рис.59. Принципиальная схема аппаратуры АУК.
Одновременно контакты реле КТ переключают полярность сигнала в линии связи блоков управления конвейеров на «пусковой» режим. При этом катушка пускового реле К3 первого конвейера запитывается через диоды d1 и d4. При запуске контакты этого реле включают привод первого конвейера через пускатель КП1. Как только скорость рабочего органа этого конвейера достигнет величины 75% от номинального значения, датчик скорости ДС этого конвейера через пороговый элемент включит реле К4, которое своими контактами подаст по линии связи питание к пусковому реле К5 следующего конвейера. Этот конвейер и все остальные в этой линии будут запускаться по вышеизложенной схеме.
После запуска последнего конвейера сработает концевое реле БКР, которое досрочно разомкнет цепь питания блока реле времени БРВ. Если этого не произойдет при затянувшемся пуске всей конвейерной линии, то эта цепь разомкнется через заданное время таймером БРВ. При снятии напряжения с блока реле времени размыкаются реле КТ и К2, в результате чего прекратится подаче звукового сигнала, а полярность линии связи переключится на «рабочий» режим.
В этом режиме пусковые реле К3, К5, К7 останутся включенными через диоды d2, d3, d6, d7, d10, d11 поэтому приводы запущенных конвейеров так же остаются включенными.
Если сработает защита какого-нибудь конвейера (сработает датчик ДЗ или КСЛ), то разомкнется цепь питания пускового реле этого конвейера и он остановится, и вместе с ним произойдет остановка всех последующих конвейеров.
Останов конвейерной линии происходит и при нажатии кнопки «стоп», контакты которой обесточат линию связи, через которую запитаны пусковые реле всех конвейеров в этой линии.
Хотя аналоговые системы управления конвейерными линиями еще в достаточном количестве используются на горных предприятиях, но им на смену приходят микропроцессорные системы управления. Одной из таких систем является серийно выпускаемая аппаратура СУКЛ.
10.4. Структура и принцип работы системы автоматического управления конвейерной линией в цифровом варианте
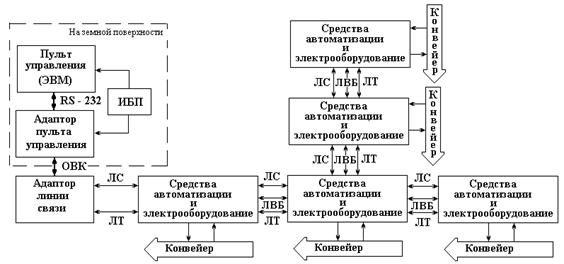 |
Структуру системы автоматического управления конвейерной линией в цифровом (микропроцесcорном) варианте рассмотрим на примере аппаратуры типа «САУКЛ», показанной на рис.60.
Рис. 60. Структурная схема аппаратуры автоматического управления конвейерной линией типа «САУКЛ».
Эта система строится по двух уравнемому типу. На верхнем уровне этой системы располагается пульт управления, который представлен управляющим компьютером, расположенном на диспетчерском пульте шахты. На нижнем уровне этой системы располагаются блоки средств автоматизации и электрооборудования для каждого конвейера конвейерной линии. Эти блоки расположены в подземных выработках в непосредственной близости от управляемых ими конвейеров. Блоки последовательно связаны между собой линией связи (ЛС), линией взаимоблокировки (ЛВБ) и телефонной линией (ТЛ). Связь верхнего и нижнего уровней этой системы производится через систему двух адаптеров:
· адаптера пульта управления;
· адаптера линии связи.
Адаптер пульта управления преобразует цифровой сигнал компьютера в форму, приспособленную для передачи через оптический канал, который проложен по оптоволоконному кабелю через ствол шахты к адаптеру линии связи, расположенному под землей на горизонте работы конвейерной линии. Адаптер линии связи обратно преобразует сигнал оптоволоконного кала в форму протокола «токовая петля» и передает его к блокам автоматизации конвейеров по двухпроводной линии связи
Структура блока автоматизации и электрооборудования аппаратуры «САУКЛ» показана на рис.61.
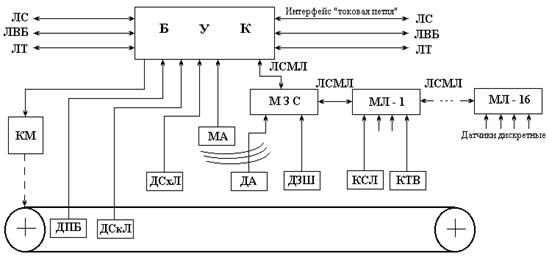 |
Рис.61. Структурная схема блока автоматизации и электрооборудования
аппаратуры «САУКЛ».
В эту схему введены следующие обозначения:
БУК – блок управления конвейером;
КМ – пускатель привода конвейера;
ДПБ – датчик проскальзывания барабана;
ДСкЛ – датчик скорости ленты;
МА – модуль аккустический;
ДА – датчик акустический;
МЗС – модуль защиты и сигнализации;
ДЗШ – датчик заштыбовки;
ЛСМЛ – линия связи модулей линейных;
МЛ – модуль линейный;
КСЛ – датчик схода ленты;
КТВ – кабель-троссовый выключатель;
Принцип работы этой системы управления конвейерной линией следующий: Сигнал на запуск конвейерной линии подается диспетчером с пульта управления (с компьютера верхнего уровня). Этот сигнал последовательно через оба адаптера передается в линию связи, где он одновременно воспринимается блоками управления всех конвейеров, но исполняется эта команда только конвейером у разгрузочного пункта, потому то в команде указан адрес этого конвейера. По этой команде блок управления этого конвейера запускает модуль акустический, который выдает звуковой предупредительный сигнал в течении заданного времени. По истечению этого времени через пускатель КМ запускается привод конвейера. При этом датчиком ДСкЛ контролируется скорость рабочего органа конвейера. Как только эта скорость достигнет номинального значения, БУК по линии связи передает команду на верхний уровень о завершении запуска первого конвейера.
После этого компьютер верхнего уровня программно передает в линию связи очередную команду на запуск следующего конвейера, которая воспринимается уже только вторым конвейером и исполняется им аналогично. Таким образом, последовательно запускаются все конвейеры а линии.
Аварийное отключение конвейера производится его блоком управления при срабатывании одного датчиков защиты, таких как КТВ, КСЛ, ДЗШ, ДСхЛ или ДПБ. При этом БУК этого конвейера по линии взаимоблокировки передает команду на одновременный останов конвейеров, транспортирующих груз на этот остановившийся конвейер.
Оперативный останов конвейерной линии производится по команде с компьютера верхнего уровня, при этом первым воспринимает эту команду конвейер у загрузочного пункта, который после своей остановки передает по линии взаимоблокировки команду «стоп» следующему конвейеру, который, остановившись, выполняет аналогичную команду для своего последующего конвейера и т.д. Таким образом, производится последовательный останов всей конвейерной линии.
10.5. Структура алгоритма автоматического управления конвейерной линией в цифровом варианте
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 10397; Нарушение авторских прав?; Мы поможем в написании вашей работы!