КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Однофазные и конденсаторные асинхронные двигатели
|
|
|
|
Использование асинхронных двигателей, укомплектованных такими устройствами для частотного регулирования, наиболее целесообразно в пожаро- и взрывоопасных средах (химическая и нефтеперерабатывающая промышленность), где применение коллекторных двигателей (см. гл. 29) недопустимо.
Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при f1 =50 Гц и р = 1÷5 пар полюсов можно получить следующие синхронные частоты вращения: 3000, 1500, 1000, 750, 600 об/мин.
Изменять число полюсов в обмотке статора можно либо укладкой на статоре двух обмоток с разным числом полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение.
Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) показан на рис. 15.12: при последовательном согласном соединении двух катушек возбуждаемое ими магнитное поле образует четыре полюса (рис. 15.12, а); при последовательном встречном (рис. 15.12, б) или параллельном соединениях (рис. 15.12, в) — два полюса. Таким образом, принцип образования полюсно переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя
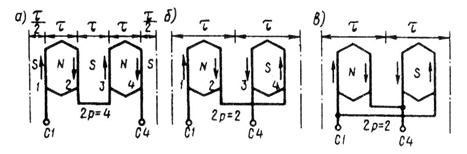
Рис 15.12. Схемы включения обмотки статора
на разное число полюсов
схему соединения которых получают разное число полюсов.
Возможны два режима работы асинхронных двигателей с полюсно переключаемыми обмотками:
режим постоянного момента (рис. 15.13, а) — при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения n2:
|
|
|
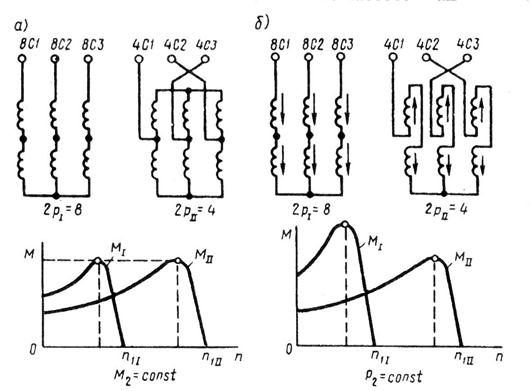
Рис. 15.13. Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента (а) и постоянной скорости (б)
Р2 = 0,105 М2 n2 (15.7)
режим постоянной мощности (рис. 15.13, б) — при переключении двигателя с одной частоты вращения на другую мощность P2 остается примерно одинаковой, а момент на валу M2 изменяется соответственно изменению частоты вращения n2:
М2 = 9,55 Р2/ n2. (15.8)
Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов. Например, асинхронный двигатель типа 4А180М12/8/6/4 имеет на статоре обмотку, допускающую переключение на 12,8,6,4 полюса.
Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке ротора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя.
Контрольные вопросы
1. Какими показателями характеризуются пусковые свойства асинхронных двигателей? 2. Каковы достоинства и недостатки пусковых свойств асинхронных двигателей?
3. Как лучше, с точки зрения улучшения пусковых свойств, уменьшить пусковой ток: снижением подводимого к двигателю напряжения или увеличением активного сопротивления в цепи обмотки ротора?
4. Каковы достоинства и недостатки пуска асинхронных двигателей непосредственным включением в сеть?
|
|
|
5. Какие существуют способы пуска асинхронных двигателей при пониженном напряжении?
6. В чем сущность эффекта вытеснения тока и почему он возникает при пуске двигателя и почти исчезает при его работе?
7. Почему бутылочная форма паза ротора способствует лучшему проявлению эффекта вытеснения тока?
8. Перечислите способы регулирования частоты вращения асинхронных двигателей и дайте им сравнительную оценку.
9. Почему при частотном регулировании частоты вращения одновременно с частотой тока необходимо изменять напряжение?
ГЛАВА 16
§16.1. Принцип действия и пуск однофазного асинхронного двигателя
По своему устройству однофазный асинхронный двигатель аналогичен трехфазному и состоит из статора, в пазах которого уложена однофазная обмотка (см. рис. 8.8), и короткозамкнутого ротора. Особенность работы однофазного асинхронного двигателя заключается в том, что при включении однофазной обмотки статора С1—С2 в сеть (рис. 16.1) МДС статора создает не вращающийся, а пульсирующий магнитный поток (см. § 9.4) с амплитудой Фmах, изменяющейся от + Фmах до – Фmах При этом ось магнитного потока остается неподвижной в пространстве.
Для объяснения принципа действия однофазного двигателя пульсирующий поток Фmах разложим на два вращающихся в противоположные стороны потока Фпр и Фобр (рис. 16.2), каждый из которых равен 0,5Фmax и вращается с частотой (об/мин)
nпр = nобр = f160/ p = n1
Условимся считать поток Фпр вращающийся в направлении вращения ротора, прямым, а поток Фо6р -обратным. Допустим, что ротор двигателя вращается против часовой стрелки, т. е. в направлении потока Фпр.
Частота вращения ротора n2 меньше частоты вращения магнитного поля статора n1, поэтому скольжение ротора относительно вращающегося потока Фпр будет
sпр = (n1 – n2)/ n1 = s (16.1)
Обратный поток Фобр вращается противоположно ротору, поэтому частота вращения ротора n2 относительно Фобр - отрицательная. В этом случае скольжение ротора относительно Фобр определится выражением
sобр =  (16.2)
(16.2)
Прямое поле наводит в обмотке ротора ЭДС Е2пр, а обратное поле — ЭДС Е2обр. Эти ЭДС создают в обмотке ротора токи I/2пр и I/2обр.
Известно, что частота тока в роторе пропорциональна скольжению (f 2 = s f 1). Так как snp < sобр, то частота тока I/2обр намного больше частоты тока I/2пр. Так, для однофазного двигателя с n1 = 1500 об/мин, n2 = 1450 об/мин и f 1 = 50 Гц получим:
|
|
|
snp = (1500 - 1450)/ 1500 = 0,033;
f 2пр = 0,033 - 50 = 1,8 Гц;
sобр = (1500 +1450)/ 1500 = 1,96;
f 2о6р = 1,96 - 50 = 98 Гц.
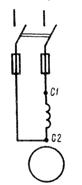
Рис.16.1 Схема включения однофазного
асинхронного двигателя
Индуктивное сопротивление обмотки ротора току I/2обр во много раз больше ее активного сопротивления (потому что f 2обр >> f 2пр). Ток I/2о6р является почти чисто индуктивным, оказывающим сильное размагничивающее действие на обратное поле Фобр. В результате обратное поле и обусловленный им момент Мобр оказываются значительно ослабленными и ротор однофазного двигателя вращается и направлении прямого поля под действием момента
М = Мпр - М06р, (16.3)
где Мпр — электромагнитный момент, обусловленный прямым полем.
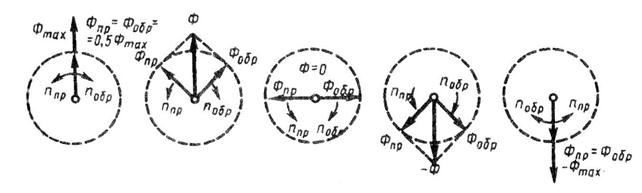
Рис. 16.2. Разложение пульсирующего магнитного потока на два вращающихся
На рис. 16.3 представлен график зависимости вращающего момента М в функции скольжения s = sпр. Этот график получен путем наложения графиков Мпр = f (snp) и Мо6р = f (sобр)- При малых значениях скольжения s, что соответствует работе двигателя в пределах номинальной нагрузки, вращающий момент Мсоздается главным образом моментом Мпр.
При sпр = sобр = 1 моменты Мпр и Мо6р равны, а поэтому пусковой момент однофазного двигателя равен нулю. Следовательно, однофазный асинхронный двигатель не может самостоятельно прийти во вращение при подключении его к сети, а нуждается в первоначальном толчке, так как лишь при s≠ 1 на ротор двигателя действует вращающий момент М = Мпр- Мобр
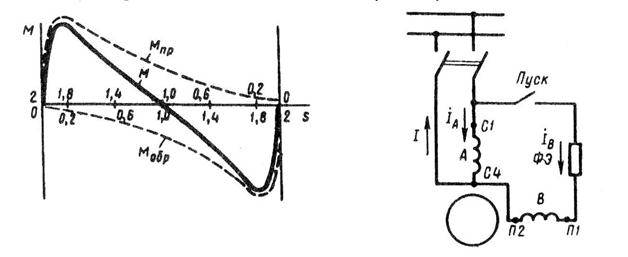
Рис. 16.3. Механические характе- Рис. 16.4. Схема однофазного ристики однофазного асинхронного асинхронного двигателя с пусковой двигателя обмоткой
Приведенные на рис. 16.3 зависимости моментов показывают, что однофазный асинхронный двигатель не создает пускового момента. Чтобы этот момент появился, необходимо во время пуска двигателя создать в нем вращающееся магнитное поле. С этой целью на статоре двигателя помимо рабочей обмотки Априменяют еще одну обмотку — пусковую В. Эти обмотки располагают на статоре обычно так, чтобы их оси были смещены относительно друг друга на 90 эл. град. Кроме того, токи в обмотках статора  и
и  должны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазосмещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость (рис. 16.4). По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным.
должны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазосмещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость (рис. 16.4). По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным.
|
|
|
Для получения вращающегося магнитного поля посредством двух обмоток на статоре, смещенных относительно друг друга на 90 эл. град, необходимо соблюдать следующие условия (рис. 16.5):
а) МДС рабочей и пусковой обмоток  и
и  должны быть и равны и сдвинуты в пространстве относительно друг друга на 90 эл. град;
должны быть и равны и сдвинуты в пространстве относительно друг друга на 90 эл. град;
б) токи в обмотках статора и должны быть сдвинуты по фазе относительно друг друга на 90°.
При строгом соблюдении указанных условий вращающееся поле статора является круговым, что соответствует наибольшему вращающему моменту. При частичном нарушении какого-либо из условий поле статора становится эллиптическим, содержащим обратную составляющую (см. рис. 9.5, б). Обратная составляющая поля создает тормозной момент и ухудшает пусковые свойства двигателя.
Из векторных диаграмм, приведенных на рис. 16.6, видно, что активное сопротивление и индуктивность в качестве ФЭ не обеспечивают получения фазового сдвига между токами в 90°. Лишь только емкость С в качестве ФЭ обеспечивает фазовый сдвиг ψ = 90°. Значение этой емкости выбирают таким, чтобы ток пусковой обмотки в момент пуска (s = 1) опережал по фазе напряжение  , на угол φв, дополняющий угол φА до 90°:
, на угол φв, дополняющий угол φА до 90°:
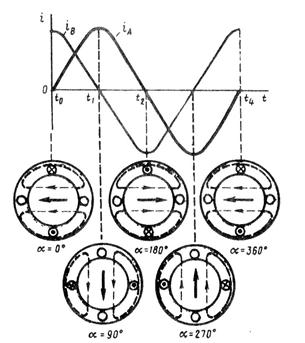
Рис. 16.5. Получение вращающегося магнитного
поля двухфазной системой токов
Если при этом обе обмотки создают одинаковые по значению МДС, то в начальный период пуска вращающееся поле окажется круговым и двигатель будет развивать значительный начальный пусковой момент. Однако применение емкости в качестве ФЭ часто ограничивается значительными габаритами конденсаторов, тем более что для получения кругового поля требуются конденсаторы значительной емкости. Например, для однофазного двигателя мощностью 200 Вт необходима емкость 30 мкФ при рабочем напряжении 300—500 В.
Получили распространение однофазные двигатели с активным сопротивлением в качестве ФЭ. При этом повышенное активное сопротивление пусковой обмотки достигается тем, что она выполняется проводом уменьшенного сечения (по сравнению с проводом рабочей обмотки). Так как эта обмотка включена на непродолжительное время (обычно несколько секунд), то такая ее конструкция вполне допустима. Пусковой момент таких двигателей обычно не превышает номинального, но это вполне приемлемо при пуске двигателей при небольшой нагрузке на валу.
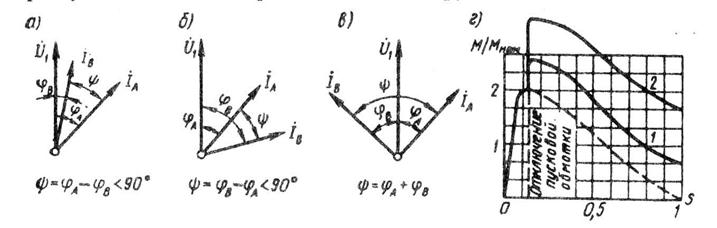
Рис. 16.6. Сравнение свойств фазосмещающих элементов:
а— активное сопротивление, б— индуктивность, в— емкость, г— механические характеристики двигателя при различных фазосмещающих элементах; 1 — активное сопротивление; 2— емкость
Применение емкости в качестве ФЭ позволяет получить пусковой момент Мп= (1,6÷2,0) Мном. На рис. 16.6, г приведены механические характеристики однофазного асинхронного двигателя при различных ФЭ. Для большей наглядности значения момента даны в относительных единицах.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 2074; Нарушение авторских прав?; Мы поможем в написании вашей работы!