КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общий случай 1 страница
|
|
|
|
В квантовой физике вводится комплекснозначная функция  , описывающая чистое состояние объекта, которая называется волновой функцией. В наиболее распространенной копенгагенской интерпретации эта функция связана с вероятностью обнаружения объекта в одном из чистых состояний (квадрат модуля волновой функции представляет собой плотность вероятности). Поведение гамильтоновой системы в чистом состоянии полностью описывается с помощью волновой функции.
, описывающая чистое состояние объекта, которая называется волновой функцией. В наиболее распространенной копенгагенской интерпретации эта функция связана с вероятностью обнаружения объекта в одном из чистых состояний (квадрат модуля волновой функции представляет собой плотность вероятности). Поведение гамильтоновой системы в чистом состоянии полностью описывается с помощью волновой функции.
Отказавшись от описания движения частицы с помощью траекторий, получаемых из законов динамики, и определив вместо этого волновую функцию, необходимо ввести в рассмотрение уравнение, эквивалентное законам Ньютона и дающее рецепт для нахождения в частных физических задачах. Таким уравнением является уравнение Шрёдингера.
Пусть волновая функция задана в N-мерном пространстве, тогда в каждой точке с координатами  , в определенный момент времени t она будет иметь вид
, в определенный момент времени t она будет иметь вид  . В таком случае уравнение Шрёдингера запишется в виде:
. В таком случае уравнение Шрёдингера запишется в виде:

где  ,
,  — постоянная Планка;
— постоянная Планка;  — масса частицы,
— масса частицы,  — внешняя по отношению к частице потенциальная энергия в точке ,
— внешняя по отношению к частице потенциальная энергия в точке ,  — оператор Лапласа (или лапласиан), эквивалентен квадрату оператора набла и в n-мерной системе координат имеет вид:
— оператор Лапласа (или лапласиан), эквивалентен квадрату оператора набла и в n-мерной системе координат имеет вид:

Элементы физики атомного ядра. Размер, состав и заряд атомного ядра. Дефект массы и энергия связи ядра. Спин ядра и его магнитный момент. Ядерные силы. Модели ядра. Радиоактивное излучение и его виды
А́томное ядро́ — центральная часть атома, в которой сосредоточена основная его масса (более 99,9 %). Ядро заряжено положительно, заряд ядра определяет химический элемент, к которому относят атом. Размеры ядер различных атомов составляют несколько фемтометров, что в более чем в 10 тысяч раз меньше размеров самого атома.
|
|
|
Атомное ядро состоит из нуклонов — положительно заряженных протонов и нейтральных нейтронов, которые связаны между собой при помощи сильного взаимодействия. Протон и нейтрон обладают собственным моментом количества движения (спином), равным  и связанным с ним магнитным моментом.
и связанным с ним магнитным моментом.
Количество протонов в ядре называется его зарядовым числом  — это число равно порядковому номеру элемента, к которому относится атом в натуральном ряду элементов в таблице Менделеева. Количество протонов в ядре определяет структуру электронной оболочки нейтрального атома и, таким образом, химические свойства соответствующего элемента. Количество нейтронов в ядре называется его изотопическим числом
— это число равно порядковому номеру элемента, к которому относится атом в натуральном ряду элементов в таблице Менделеева. Количество протонов в ядре определяет структуру электронной оболочки нейтрального атома и, таким образом, химические свойства соответствующего элемента. Количество нейтронов в ядре называется его изотопическим числом  . Ядра с одинаковым числом протонов и разным числом нейтронов называются изотопами. Ядра с одинаковым числом нейтронов, но разным числом протонов — называются изотонами. Термины изотоп и изотон используются также применительно к атомам, содержащим указанные ядра, а также для характеристики нехимических разновидностей одного химического элемента. Полное количество нуклонов в ядре называется его массовым числом
. Ядра с одинаковым числом протонов и разным числом нейтронов называются изотопами. Ядра с одинаковым числом нейтронов, но разным числом протонов — называются изотонами. Термины изотоп и изотон используются также применительно к атомам, содержащим указанные ядра, а также для характеристики нехимических разновидностей одного химического элемента. Полное количество нуклонов в ядре называется его массовым числом  (
( ) и приблизительно равно средней массе атома, указанной в таблице Менделеева. Нуклиды с одинаковым массовым числом, но разным протон-нейтронным составом принято называть изобарами.
) и приблизительно равно средней массе атома, указанной в таблице Менделеева. Нуклиды с одинаковым массовым числом, но разным протон-нейтронным составом принято называть изобарами.
Нуклоны в ядрах находятся в состояниях, существенно отличающихся от их свободных состояний. За исключением ядра обычного водорода, во всех ядрах имеется не менее двух нуклонов, между которыми существует особое ядерное сильное взаимодействие – притяжение, обеспечивающее устойчивость ядер несмотря на отталкивание одноименно заряженных протонов.
Энергией связи нуклона в ядре называется физическая величина, равная той работе, которую нужно совершить для удаления нуклона из ядра без сообщения ему кинетической энергии.
|
|
|
Энергия связи ядра определяется величиной той работы, которую нужно совершить, чтобы расщепить ядро на составляющие его нуклоны без придания им кинетической энергии.
Из закона сохранения энергии следует, что при образовании ядра должна выделяться такая энергия, которую нужно затратить при расщеплении ядра на составляющие его нуклоны. Энергия связи ядра является разностью между энергией всех свободных нуклонов, составляющих ядро, и их энергией в ядре.
При образовании ядра происходит уменьшение его массы: масса ядра меньше, чем сумма масс составляющих его нуклонов. Уменьшение массы ядра при его образовании объясняется выделением энергии связи. Если W св – величина энергии, выделяющейся при образовании ядра, то соответствующая ей масса

| (9.2.1) |
называется дефектом массы и характеризует уменьшение суммарной массы при образовании ядра из составляющих его нуклонов.
Если ядро массой М яд образовано из Z протонов с массой mp и из (A – Z) нейтронов с массой mn, то:
 . .
| (9.2.2) |
Вместо массы ядра М яд величину ∆ m можно выразить через атомную массу М ат:
 ., .,
| (9.2.3) |
где mН – масса водородного атома. При практическом вычислении ∆ m массы всех частиц и атомов выражаются в атомных единицах массы (а.е.м.). Одной атомной единице массы соответствует атомная единица энергии (a.e.э.): 1 а.е.э. = 931,5016 МэВ.
Дефект массы служит мерой энергии связи ядра:
 . .
|
Собственный момент импульса ядра — спин ядра — складывается из спинов нуклонов и из орбитальных моментов импульса нуклонов (моментов импульса, обусловленных движением нуклонов внутри ядра). Обе эти величины являются векторами, поэтому спин ядра представляет их векторную сумму. Спин ядра квантуется по закону

где I — спиновое ядерное квантовое число (его часто называют просто спином ядра), которое принимает целые или полуцелые значения 0,  , 1,
, 1,  ,.... Ядра с четными А имеют целые I, с нечетными — полуцелые I.
,.... Ядра с четными А имеют целые I, с нечетными — полуцелые I.
Атомное ядро кроме спина обладает магнитным моментом рmя. Магнитный момент ядра связан со спином ядра: pmя=gяLя, где g я — коэффициент пропорциональности, называемый ядерным гиромагнитным отношением.
|
|
|
Единицей магнитных моментов ядер служит ядерный магнетон

Ядерные силысилы — удерживающие нуклоны (протоны и нейтроны) в ядре. Они действуют только на расстояниях не более 10 -13 см и достигают величины, в 100-1000 раз превышающей силу взаимодействия электрических зарядов.
Ядерные силы не зависят от заряда нуклонов. Они обусловлены сильным взаимодействием.
Перечислим основные свойства ядерных сил:
1) ядерные силы являются силами притяжения;
2) ядерные силы являются короткодействующими — их действие проявляется только на расстояниях примерно 10–15 м. При увеличении расстояния между нуклонами ядерные силы быстро уменьшаются до нуля, а при расстояниях, меньших их радиуса действия, оказываются примерно в 100 раз больше кулоновских сил, действующих между протонами на том же расстоянии;
3) ядерным силам свойственна зарядовая независимость: ядерные силы, действующие между двумя протонами, или двумя нейтронами, или, наконец, между протоном и нейтроном, одинаковы по величине. Отсюда следует, что ядерные силыимеютнеэлектрическую природу;
4) ядерным силам свойственно насыщение, т. е. каждый нуклон в ядре взаимодействует только с ограниченным числом ближайших к нему нуклонов. Насыщение проявляется в том, что удельная энергия связи нуклонов в ядре (если не учитывать легкие ядра) при увеличении числа нуклонов не растет, а остается приблизительно постоянной;
5) ядерные силы зависят от взаимной ориентации спинов взаимодействующих нуклонов. Например, протон и нейтрон образуют дейтрон (ядро изотопа  Н) только при условии параллельной ориентации их спинов;
Н) только при условии параллельной ориентации их спинов;
6) ядерные силы не являются центральными, т. е. действующими по линии, соединяющей центры взаимодействующих нуклонов.
Сложный характер ядерных сил и трудность точного решения уравнений движения всех нуклонов ядра (ядро с массовым числом А представляет собой систему из А тел) не позволили до настоящего времени разработать единую последовательную теорию атомного ядра. Поэтому на данной стадии прибегают к рассмотрению приближенных ядерных моделей, в которых ядро заменяется некоторой модельной системой, довольно хорошо описывающей только определенные свойства ядра и допускающей более или менее простую математическую трактовку. Из большого числа моделей, каждая из которых обязательно использует подобранные произвольные параметры, согласующиеся с экспериментом, рассмотрим две: капельную и оболочечную.
|
|
|
1. Капельная модель ядра (1936; Н. Бор и Я. И. Френкель). Капельная модель ядра является первой моделью. Она основана на аналогии между поведением нуклонов в ядре и поведением молекул в капле жидкости. Так, в обоих случаях силы, действующие между составными частицами — молекулами в жидкости и нуклонами в ядре, — являются короткодействующими и им свойственно насыщение. Для капли жидкости при данных внешних условиях характерна постоянная плотность ее вещества.
2. Оболочечная модель ядра (1949—1950; американский физик М. Гепперт-Майер (1906—1975) и немецкий физик X. Иенсен (1907—1973)). Оболочечная модель предполагает распределение нуклонов в ядре по дискретным энергетическим уровням (оболочкам), заполняемым нуклонами согласно принципу Паули, и связывает устойчивость ядер с заполнением этих уровней. Считается, что ядра с полностью заполненными оболочками являются наиболее устойчивыми. Такие особо устойчивые (магические) ядра действительно существуют.
По мере дальнейшего накопления экспериментальных данных о свойствах атомных ядер появлялисьвсе новые факты, не укладывающиеся в рамки описанных моделей. Так возникли обобщенная модель ядра (синтез капельной и оболочечной моделей), оптическая модель ядра (объясняет взаимодействие ядер с налетающими частицами) и другие модели.
Французский физик А. Беккерель (1852—1908) в 1896 г. при изучении люминесценции солей урана случайно обнаружил самопроизвольное испускание ими излучения неизвестной природы, которое действовало на фотопластинку, ионизировало воздух, проникало сквозь тонкие металлические пластинки, вызывало люминесценцию ряда веществ. Продолжая исследование этого явления, супруги Кюри — Мария (1867—1934) и Пьер — обнаружили, что беккерелевское излучение свойственно не только урану, но и многим другим тяжелым элементам, таким, как торий и актиний. Они показали также, что урановая смоляная обманка (руда, из которой добывается металлический уран) испускает излучение, интенсивность которого во много раз превышает интенсивность излучения урана. Таким образом удалось выделить два новых элемента — носителя беккерелевского излучения: полоний  Рo и радий
Рo и радий  Ra.
Ra.
Обнаруженное излучение было названо радиоактивным излучением, а само явление — испускание радиоактивного излучения — радиоактивностью.
Дальнейшие опыты показали, что на характер радиоактивного излучения препарата не оказывают влияния вид химического соединения, агрегатное состояние, механическое давление, температура, электрические и магнитные поля, т. е. все те воздействия, которые могли бы привести к изменению состояния электронной оболочки атома. Следовательно, радиоактивные свойства элемента обусловлены лишь структурой его ядра.
В настоящее время под радиоактивностью понимают способность некоторых атомных ядер самопроизвольно (спонтанно) превращаться в другие ядра с испусканием различных видов радиоактивных излучений и элементарных частиц. Радиоактивность подразделяется на естественную (наблюдается у неустойчивых изотопов, существующих в природе) и искусственную (наблюдается у изотопов, полученных посредством ядерных реакций). Принципиального различия между этими двумя типами радиоактивности нет, так как законы радиоактивного превращения в обоих случаях одинаковы.
Радиоактивное излучение бывает трех типов: альфа -, бета- и гама -излучение. Подробное их исследование позволило выяснить природу и основные свойства.
Альфа-частица (α-частица) — положительно заряженная частица, образованная 2 протонами и 2 нейтронами. Идентична ядру атома гелия-4. Образуется при альфа-распаде ядер.
Бета-частица (β-частица) — заряженная частица, испускаемая в результате бета-распада. Поток бета-частиц называется бета-лучами или бета-излучением. Отрицательно заряженные бета-частицы являются электронами (β−), положительно заряженные — позитронами (β+).
Гамма-излучение (γ-излучение) — вид электромагнитного излучения с чрезвычайно малой длиной волны — < 5×10−3 нм и, вследствие этого, ярко выраженными корпускулярными и слабо выраженными волновыми свойствами. Гамма-квантами являются фотоны с высокой энергией.
Динамика вращательного движения. Момент инерции, теорема Штейнера. Кинетическая энергия при вращательном движении. Момент силы. Уравнение динамики при вращении. Момент импульса и закон его сохранения
 Всякое твердое тело можно рассматривать как систему из n материальных точек и масса m тела есть сумма масс всех этих точек:
Всякое твердое тело можно рассматривать как систему из n материальных точек и масса m тела есть сумма масс всех этих точек:  . Будем считать, что тело абсолютно твердое, т.е. расстояния между любыми двумя его материальными точками не изменяются в процессе движения.
. Будем считать, что тело абсолютно твердое, т.е. расстояния между любыми двумя его материальными точками не изменяются в процессе движения.
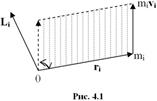
Рассмотрим движение твердого тела, закрепленного о одной неподвижной точке О, вокруг которой тело может свободно вращаться. Эта точка называется центром вращения тела. Совместим с этой точкой начало неподвижной системы координат. Тогда положение в пространстве i-точки тела определяется радиусом-вектором ri, проведенным из центра О в эту точку(4.1).
Обозначим через Fik силу, действующую на i-ю точку тела со стороны k-ой его точки, и через Fi – равнодействующую всех внешних сил, приложенных к i-й точке. По второму закону Ньютона уравнение движения этой материальной точки имеет следующий вид:  ; (k≠i, т.к. i-я точка сама на себя не действует). Умножим обе части этого уравнения векторно на ri:
; (k≠i, т.к. i-я точка сама на себя не действует). Умножим обе части этого уравнения векторно на ri:  . Векторное произведение радиуса-вектора ri материальной точки на ее импульс mivi называется моментом импульса Li этой материальной точки относительно точки О:
. Векторное произведение радиуса-вектора ri материальной точки на ее импульс mivi называется моментом импульса Li этой материальной точки относительно точки О:  . Вектор Li называют также моментом количества движения материальной точки. Он направлен перпендикулярно к плоскости, проведенной через векторы ri и mivi, и образует с ними правую тройку векторов: при наблюдении из конца Li видно, что вращение от ri к mivi по кратчайшему расстоянию происходит против часовой стрелки.
. Вектор Li называют также моментом количества движения материальной точки. Он направлен перпендикулярно к плоскости, проведенной через векторы ri и mivi, и образует с ними правую тройку векторов: при наблюдении из конца Li видно, что вращение от ri к mivi по кратчайшему расстоянию происходит против часовой стрелки.
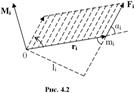 Векторное произведение радиуса-вектора ri, проведенного из центра О в точку приложения внешней силы Fi, на эту силу, называется моментом Mi силы Fi относительно точки О:
Векторное произведение радиуса-вектора ri, проведенного из центра О в точку приложения внешней силы Fi, на эту силу, называется моментом Mi силы Fi относительно точки О:  Векторы ri, Fi и Mi также образуют правую тройку. Модуль момента силы, как следует из рисунка, равен: Mi = Fili = Firisinαi, где li – плечо силы Fi, т.е. длина перпендикуляра, опущенного из точки О на линию действия силы.
Векторы ri, Fi и Mi также образуют правую тройку. Модуль момента силы, как следует из рисунка, равен: Mi = Fili = Firisinαi, где li – плечо силы Fi, т.е. длина перпендикуляра, опущенного из точки О на линию действия силы.
 Моментом инерции тела относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек тела на квадраты их расстояний до рассматриваемой оси:
Моментом инерции тела относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек тела на квадраты их расстояний до рассматриваемой оси:  . В случае непрерывного распределения масс эта сумма сводится к интегралу
. В случае непрерывного распределения масс эта сумма сводится к интегралу  , где интегрирование производится по всему объему тела. Величина r в данном случае есть функция положения точки с координатами x, y, z.
, где интегрирование производится по всему объему тела. Величина r в данном случае есть функция положения точки с координатами x, y, z.
Неподвижная ось вращения z может проходить как через центр инерции тела (ось вращения маховика, ротора турбины и т.п.), так и вне его (например, ось вращения самолета, выполняющего мертвую петлю). Если известен момент инерции тела относительно оси, проходящей через его центр масс (инерции), то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера (теоремой о переносе осей инерции): момент инерции тела Jz относительно произвольной оси вращения z равен сумме момента инерции тела относительно оси ОО1, проведенной через центр инерции С тела параллельно оси z и произведения массы тела на квадрат расстояния между этими осями (рис. 4.3):  . Т.о., с удалением центра инерции тела от его оси вращения момент инерции тела относительно этой оси возрастает. Момент инерции тела зависит не только от его массы, но и от ее распределения относительно оси вращения.
. Т.о., с удалением центра инерции тела от его оси вращения момент инерции тела относительно этой оси возрастает. Момент инерции тела зависит не только от его массы, но и от ее распределения относительно оси вращения.
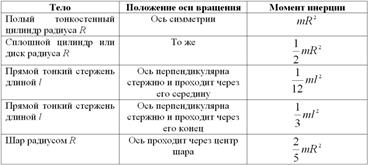 Значения моментов инерции для некоторых однородных тел.
Значения моментов инерции для некоторых однородных тел.
Скорость изменения момента импульса i-й материальной точки определяется следующим образом:  . Сложим почленно уравнения, записанные для каждой из материальных точек тела:
. Сложим почленно уравнения, записанные для каждой из материальных точек тела:  . Векторная сумма моментов Mi всех внешних сил, приложенных к телу, называется результирующим, или главным, моментом M внешних сил относительно точки О:
. Векторная сумма моментов Mi всех внешних сил, приложенных к телу, называется результирующим, или главным, моментом M внешних сил относительно точки О:  . Векторная сумма моментов импульса Li всех материальных точек тела называется моментом импульса L тела относительно точки О:
. Векторная сумма моментов импульса Li всех материальных точек тела называется моментом импульса L тела относительно точки О:  . Так как производная от суммы равна сумме производных от всех слагаемых, то
. Так как производная от суммы равна сумме производных от всех слагаемых, то  .
.
 Наконец, векторная сумма моментов относительно точки О всех внутренних сил Fik взаимодействия между точками тела равна нулю, т.е.
Наконец, векторная сумма моментов относительно точки О всех внутренних сил Fik взаимодействия между точками тела равна нулю, т.е.  , так как по третьему закону Ньютона силы Fik и Fki численно равны, имеют общую линию действия, но направлены в противоположные стороны (рис. 4.4). Поэтому их моменты Mik = [ri, Fik] и Mki = [rk, Fki] относительно точки О численно равны и противоположны по направлению точки mi, mk и О лежат в горизонтальной плоскости, а векторы Mik и Mki перпендикулярны этой плоскости). Действительно, rk = ri + rki, где rki - вектор, проведенный из точки mi в точку mk. Поэтому Mki = [rk, Fki] + [rki, Fki] = -[ri, Fik] = -Mik, так как векторное произведение векторов rki и Fki, направленных вдоль одной прямой, равно нулю.
, так как по третьему закону Ньютона силы Fik и Fki численно равны, имеют общую линию действия, но направлены в противоположные стороны (рис. 4.4). Поэтому их моменты Mik = [ri, Fik] и Mki = [rk, Fki] относительно точки О численно равны и противоположны по направлению точки mi, mk и О лежат в горизонтальной плоскости, а векторы Mik и Mki перпендикулярны этой плоскости). Действительно, rk = ri + rki, где rki - вектор, проведенный из точки mi в точку mk. Поэтому Mki = [rk, Fki] + [rki, Fki] = -[ri, Fik] = -Mik, так как векторное произведение векторов rki и Fki, направленных вдоль одной прямой, равно нулю.
На основании изложенного уравнение можно записать в следующем виде:  . Таким образом, скорость изменения момента импульса тела, вращающегося вокруг неподвижной точки, равна результирующему моменту относительно этой точки всех внешних сил, приложенных к телу.
. Таким образом, скорость изменения момента импульса тела, вращающегося вокруг неподвижной точки, равна результирующему моменту относительно этой точки всех внешних сил, приложенных к телу.
Полученный результат называется основным законом динамики вращательного движения тела, закрепленного в одной неподвижной точке. Момент импульса является основной динамической характеристикой твердого тела, вращающегося вокруг неподвижной точки.
Рассмотрим абсолютно твердое тело, вращающееся вокруг неподвижной оси. Если мысленно разбить это тело на n точек массами m1, m2, …, mn, находящихся на расстояниях r1, r2, …, rn от оси вращения, то при вращении они будут описывать окружности и двигаться с различными линейными скоростями v1, v2, …, vn. Так как тело абсолютно твердое, то угловая скорость вращения точек будет одинакова: 
Кинетическая энергия вращающегося тела есть сумма кинетических энергий его точек, т.е.  Учитывая связь между угловой и линейной скоростями, получим:
Учитывая связь между угловой и линейной скоростями, получим: 
Сопоставление формулы с выражением для кинетической энергии тела, движущегося поступательно со скоростью v, показывает, что момент инерции является мерой инертности тела во вращательном движении.
 Если твердое тело движется поступательно со скоростью v и одновременно вращается с угловой скоростью ω вокруг оси, проходящей через его центр инерции, то его кинетическая энергия определяется как сумма двух составляющих:
Если твердое тело движется поступательно со скоростью v и одновременно вращается с угловой скоростью ω вокруг оси, проходящей через его центр инерции, то его кинетическая энергия определяется как сумма двух составляющих:  где vc – скорость центра масс тела; Jc - момент инерции тела относительно оси, проходящей через его центр масс. Моментом силы относительно неподвижной оси z называется скалярная величина Mz, равная проекции на эту ось вектора M момента силы, определенного относительно произвольной точки 0 данной оси. Значение момента Mz не зависит от выбора положения точки 0 на оси z.
где vc – скорость центра масс тела; Jc - момент инерции тела относительно оси, проходящей через его центр масс. Моментом силы относительно неподвижной оси z называется скалярная величина Mz, равная проекции на эту ось вектора M момента силы, определенного относительно произвольной точки 0 данной оси. Значение момента Mz не зависит от выбора положения точки 0 на оси z.
Если ось z совпадает с направлением вектора M, то момент силы представляется в виде вектора, совпадающего с осью: Mz = [rF]z
 Найдем выражение для работы при вращении тела. Пусть сила F приложена к точке В, находящейся от оси вращения на расстоянии r (рис. 4.6); α – угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела.
Найдем выражение для работы при вращении тела. Пусть сила F приложена к точке В, находящейся от оси вращения на расстоянии r (рис. 4.6); α – угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела.
При повороте тела на бесконечно малый угол dφ точка приложения В проходит путь ds = rdφ, и работа равна произведению проекции силы на направление смещения на величину смещения: dA= Fsinα*rdφ
 Учитывая, что Frsinα = Mz можно записать dA = Mzdφ, где Mz - момент силы относительно оси вращения. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота. Работа при вращении тела идет на увеличение его кинетической энергии:dA = dEk
Учитывая, что Frsinα = Mz можно записать dA = Mzdφ, где Mz - момент силы относительно оси вращения. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота. Работа при вращении тела идет на увеличение его кинетической энергии:dA = dEk
Уравнение представляет собой уравнение динамики вращательного движения твердого тела относительно неподвижной оси.
Моментом импульса (количества движения) материальной точки А относительно неподвижной точки О называется физическая величина, определяемая векторным произведением:

где г — радиус-вектор, проведенный из точки О в точку A; p = mv — импульс материальной точки (рис. 28); L — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к р. Модуль вектора момента импульса

Моментом импульса относительно неподвижной оси z называется скалярная величинаLz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки 0 данной оси. Значение момента импульса Lz не зависит от положения точки 0 на оси z. При вращении абсолютно твердого тела вокруг неподвижной оси каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой скоростью vi. Скорость vi и импульс Li=mivi перпендикулярны этому радиусу, т.е. радиус является плечом вектора mivi. Поэтому можно записать, что момент импульса отдельной точки относительно оси z равен  Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных его точек:
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных его точек:  Учитывая связь между линейной и угловой скоростями (vi = ωri), получим следующее выражение для момента импульса тела относительно неподвижной оси:
Учитывая связь между линейной и угловой скоростями (vi = ωri), получим следующее выражение для момента импульса тела относительно неподвижной оси:  т.е. момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. Продифференцировав выражение по времени, получим:
т.е. момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. Продифференцировав выражение по времени, получим:  Это еще одна форма уравнения динамики вращательного движения твердого тела относительно неподвижной оси: скорость изменения момента импульса тела относительно неподвижной оси вращения равна результирующему моменту относительно этой оси всех внешних сил, действующих на тело.
Это еще одна форма уравнения динамики вращательного движения твердого тела относительно неподвижной оси: скорость изменения момента импульса тела относительно неподвижной оси вращения равна результирующему моменту относительно этой оси всех внешних сил, действующих на тело.
Закон сохранения момента импульса вытекает из основного уравнения динамики вращательного движения тела, закрепленного в неподвижной точке, и состоит в следующем: если результирующий момент внешних сил относительно неподвижной точки тождественно равен нулю, то момент импульса тела относительно этой точки с течением времени не изменяется. Действительно, если M = 0, то dL / dt = 0, откуда Lz=const, Jz  =const.
=const.
Закон сохранения импульса для замкнутой системы. Замкнутая система- система, на которую не действуют внешние силы. Суммарный импульс замкнутой системеconst: 
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 366; Нарушение авторских прав?; Мы поможем в написании вашей работы!