КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Коммутирующими аппаратами силовых цепей в этом случае являются контакторы, а также различные переключатели
|
|
|
|
На вагонах метрополитена применена косвенная дистанционная система управления. При такой системе управления машинист не осуществляет непосредственного переключения в силовой цепи, а управляет оборудованием при помощи низковольтных цепей, называемых цепями управления.
Структура электрических схем тягового подвижного состава во многом определяется примененной системой управления. Различают систему непосредственного управления и систему косвенного дистанционного управления.
В многопозиционном переклю-чателе положений ПКГ-761Д силовые контакты вместе с блок-контактами обозначаются по наименованию позиций ПС, ПП, ПМ, ПТ с цифрами. Цифры показывают порядковый номер контакта.
Подвижные контакты реле, кнопок, выключателей изображают исходя из условия, что сила, приводящая к срабатыванию, должна быть, направлена сверху вниз при горизонтальном изображении цепей и слева направо при вертикальном.
При исходном положении аппарата его замыкающие контакты на схеме показывают разомкнутыми, а размыкающие замкнутыми.
За исходное положение аппарата с электропневматическим приводом принимают такое, при котором к нему подведен сжатый воздух, а цепи управления вентилями обесточены. Это важно учитывать для аппаратов, управляемых электропневматическими вентилями выключающего типа, т. к. в этом случае один из цилиндров аппарата будет сообщен с источником сжатого воздуха, что не соответствует его исходному состоянию.
Однако на подвижном составе применяют двух- или многопозиционные аппараты, у которых нет отключенного положения.
Например, двухпозиционный реверсор имеет два рабочих положения: «вперед» и «назад».
|
|
|
Аппараты, не имеющие отключенного положения, изображают на схемах в одном из рабочих положений, взятом за исходное. Например, реверсор – это положение «вперед».
Для реостатных контроллеров с электрическим приводом исходным положением является первая позиция. Переключатели типа ПКП – 25, контроллеры машиниста КВ70, КВ68, обычно имеют выключенное (нулевое) положение, которое и является исходным.
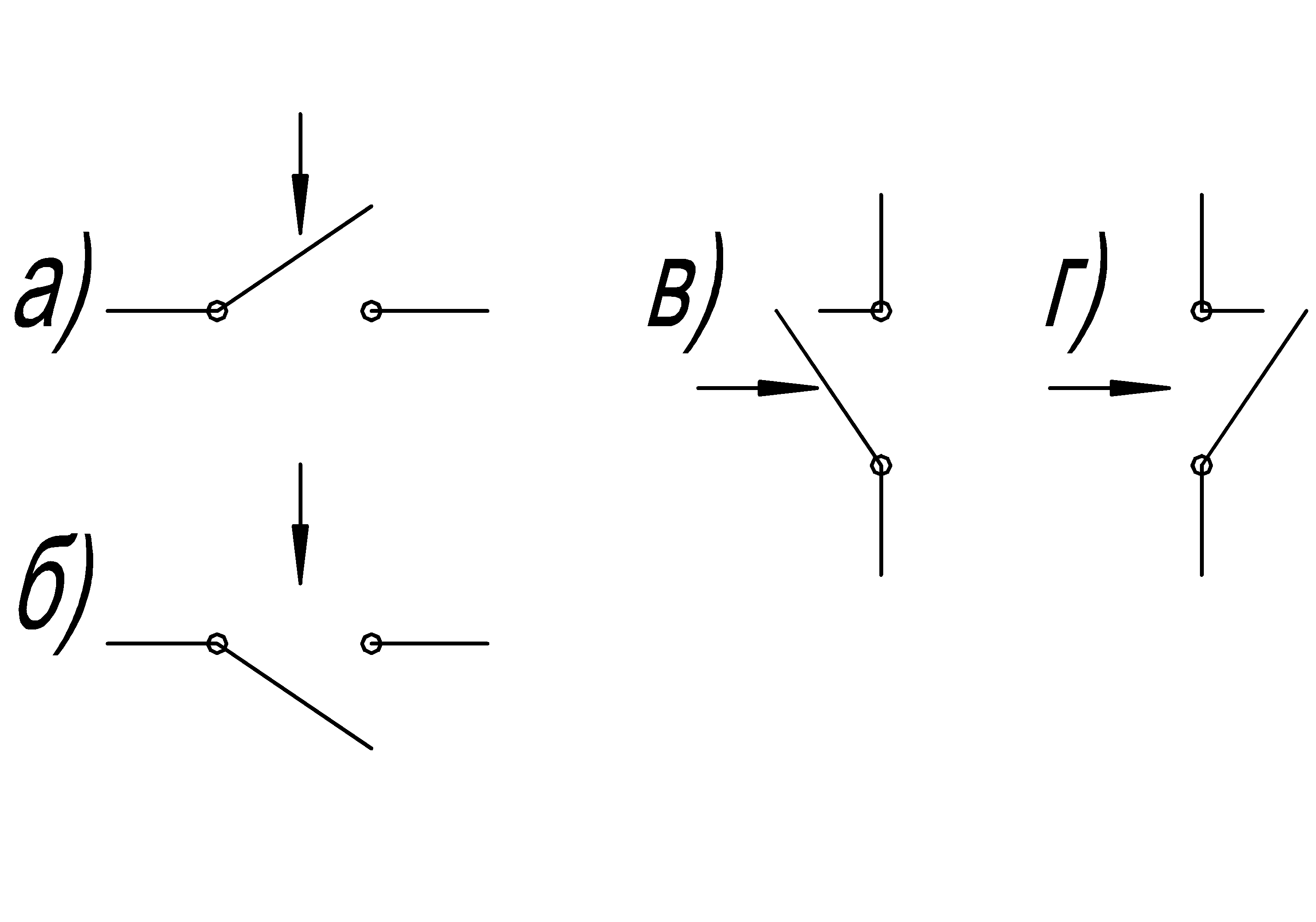 На стрелками показано направление действия силы на подвижный контакт реле, выключателя. При срабатывании реле или выключателя под действием этой силы их контакты либо замыкаются, либо размыкаются.
На стрелками показано направление действия силы на подвижный контакт реле, выключателя. При срабатывании реле или выключателя под действием этой силы их контакты либо замыкаются, либо размыкаются.
Рис.113 Направление действия силы на контакты
Для удобства пользования и облегчения запоминания используются начальные буквы слов, обозначающих наименование оборудования, или положение вала группового аппарата:
Например: мотор – компрессор – МК, реостатный контроллер - РК, реверсор – положения ВП, НАЗ, реле реверсировки – РР, переключатель положений - положения ПС, ПП, ПМ, ПТ.
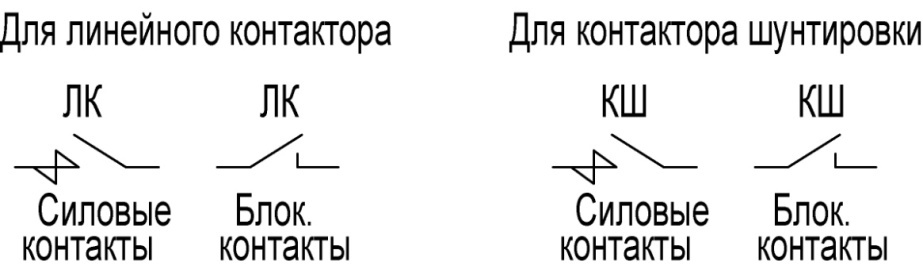
Блок – контакты аппаратов изображаются на схемах теми же символами, что и силовые контакты.
 В многопозиционном реостатном контроллере ЭКГ–39Б силовые контакты обозначаются буквами с цифрами. Цифры показывают порядковый номер контакта. Например: РК3, РК25, блок–контакты также обозначают буквами с цифрами, где цифры показывают на каких позициях данный блок – контакт замкнут. Например: РК1–16, указывает, что с 1 по 16 позиции этот контакт замкнут, а на 17-18-й позиции разомкнут.
В многопозиционном реостатном контроллере ЭКГ–39Б силовые контакты обозначаются буквами с цифрами. Цифры показывают порядковый номер контакта. Например: РК3, РК25, блок–контакты также обозначают буквами с цифрами, где цифры показывают на каких позициях данный блок – контакт замкнут. Например: РК1–16, указывает, что с 1 по 16 позиции этот контакт замкнут, а на 17-18-й позиции разомкнут.
При составлении схем цепей управления применяют определенную систему обозначения проводов, что облегчает чтение схем. Провода цепей управления разделяются на поездные, проходящие через межвагонные соединения по всему вагону, и вагонные, т.е. внутренние провода электрических цепей одного вагона.
|
|
|
Поездные провода обозначаются цифрами (1,2,3 и т. д.), вагонные – цифрами с буквами (1А, 2А, 3А).
Если вагонный провод последовательно соединяет блок – контакты или катушки аппаратов, то после каждого из них к его номеру прибавляют букву в порядке алфавита (1А, 1Б, 1В и т. д.)
Система управления схемами
Все команды на дистанционное управление вагонами по системе многих единиц передаются из головной кабины первого по ходу движения вагона поезда машинистом. В зависимости от поездной обстановки машинист переводит вручную главный вал контроллера машиниста (группового аппарата) и тем самым, включая различные комбинации кулачковых элементов, подает напряжение батареи на определенные поездные провода, по которым, практически одновременно, напряжение передается через ЭКК по всему поезду. На каждом вагоне от поездных проводов питание попадает на соответствующие вагонные провода, что и является причиной одновременной синхронной работы однотипного оборудования на всех вагонах поезда.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 538; Нарушение авторских прав?; Мы поможем в написании вашей работы!