КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индуктивные преобразователи перемещения. Принцип работы, схемы включения
|
|
|
|
 Принцип работы ИП основан на изменении самоиндукции катушки (L) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
Принцип работы ИП основан на изменении самоиндукции катушки (L) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
Схема простейшего ИП приведена где-то здесь и представляет собой катушку самоиндукции W с ферромагнитным сердечником 1 и якорем 2, отделенным от сердечника воздушным зазором . Магнитное сопротивление зазора Rизмениться в результате изменения величины воздушного зазора или его площади поперечного сечения SКатушка соединена с нагрузкой Zн и источником переменного напряжения U.
Изменение положения якоря приводит к изменению сопротивления магнитной цепи.
E г = jωMI 1,
где ω – частота питающего напряжения;
M – взаимная индуктивность обмоток;
I 1 – ток, протекающий в цепи первичной обмотки.
Одним из основных достоинств ИП является возможность получения большой мощности преобразователя, что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину вибратором осциллографа без предварительного усиления.
Простейшие ИП имеют также и существенные недостатки:
-нереверсивность;
-наличие значительного нулевого сигнала (J0);
-нелинейность ФП;
-большое тяговое усилие;
-значительный фазовый сдвиг выходного сигнала.
Рассмотрим работу реверсивного ИП, включенного по дифференциальной схеме.
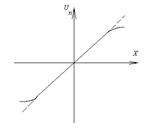
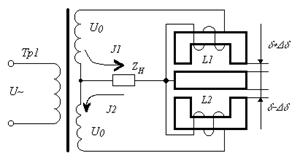 Схема состоит из дифференциального трансформатора Тр 1, двух индуктивностей L1 и L2 простейших ИП, соединенных на общую нагрузку Zн. Входным сигналом является перемещение (
Схема состоит из дифференциального трансформатора Тр 1, двух индуктивностей L1 и L2 простейших ИП, соединенных на общую нагрузку Zн. Входным сигналом является перемещение ( ) от среднего положения общего якоря.
) от среднего положения общего якоря.
|
|
|
Выходным сигналом является разность токов в нагрузке или падение напряжений на ней.
ИП применяются, в основном, для контроля размеров измерения деформации деталей.
 10 Трансформаторные преобразователи перемещения Принцип работы, схемы включения.
10 Трансформаторные преобразователи перемещения Принцип работы, схемы включения.
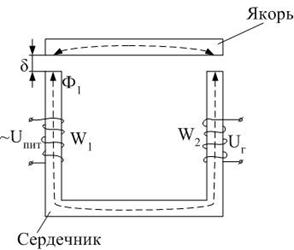
Простейший трансформаторный преобразователь изображен на рисунке.
Якорь этого преобразователя может перемещаться вертикально, либо поворачиваться горизонтально.
Принцип работы трансформаторных преобразователей основан на изменении взаимной индуктивности между обмоткой питания и генераторной обмоткой. Изменение положения якоря приводит к изменению сопротивления магнитной цепи.
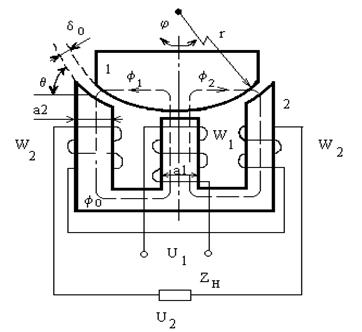
Конструкции трансформаторных преобразователей перемещения с подвижным сердечником могут быть самыми разнообразными. Наиболее часто трансформаторные преобразователи выполняются по дифференциальной схеме. Трехстержневой ТП состоит из подвижного ротора 1, статора 2 с первичной обмоткой W1 и двумя вторичными обмотками W2, соединенными встречно-последовательно.
Первичная обмотка создает магнитный поток Ф0, составляющие которого Ф1 и Ф2 перераспределяются примерно пропорционально площадям перекрытия ротором крайних стержней. Потоки Ф1 и Ф2 наводят во вторичных обмотках ЭДС, которые в силу встречного соединения вычитаются, следовательно, в среднем положении ротора и симметричной конструкции выходной сигнал равен нулю.
Источники основной погрешности:
1. Влияние магнитного сопротивления стали;
2. Непостоянство величины и площади зазора между стержнями вдоль их длины;
3. Неравномерность намотки измерительной обмотки, сказывающаяся наиболее сильно в начальной части характеристики;
4. Влияние собственной температуры на активную составляющую сопротивления обмотки, размеры зазора и магнитное сопротивление стали;
|
|
|
5. Влияние поперечных смещений сердечника.
Основным преимуществом трансформаторных преобразователей является отсутствие гальванической связи между цепями питания и выхода, а также возможность получения выходного сигнала большей величины, чем питающее напряжение.
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 1435; Нарушение авторских прав?; Мы поможем в написании вашей работы!