КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронный двигатель с полым ротором
|
|
|
|
М.О. Доливо-Добровольского
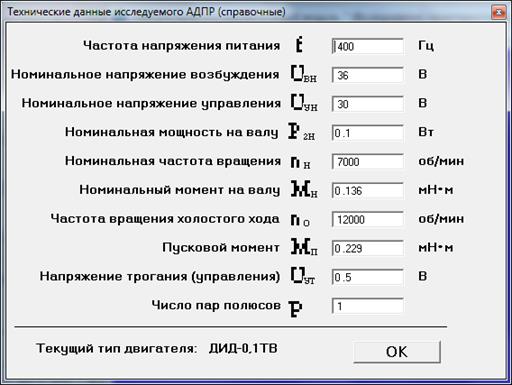
Двигатели с полым немагнитным ротором являются в настоящее время весьма распространенными исполнительными двигателями переменного тока. Они применяются в различных схемах автоматических устройств. Мощность двигателей с полым немагнитным ротором от десятых долей ватта до нескольких сотен ватт. Двигатели рассчитываются как для промышленной частоты (50 Гц), так и для повышенных частот (200, 400, 500 Гц). Частота вращения двигателей (синхронная) колеблется от 1500 до 30 000 об/мин.
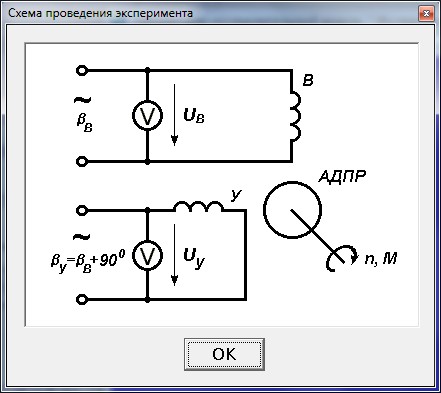
Конструктивное устройство одного из двигателей с полым немагнитным ротором представлено на рис. 18.5. Внешний статор 4 такого двигателя ничем не отличается от статора обычного асинхронного двигателя. Он набирается из изолированных друг от друга листов электротехнической стали. В пазах статора располагаются обмотки 6 управления и возбуждения, сдвинутые в пространстве на 90°. Эти обмотки либо изолированы друг от друга, либо соединены по мостиковой схеме.
Мостиковая схема представляет собой замкнутую обмотку с отпайками через 90°. Она помогает достаточно просто осуществить точный пространственный сдвиг обмоток, способствует лучшему распределению токов и потерь в них. К недостаткам схемы следует отнести, во-первых, электрическую связь цепей возбуждения и управления, во-вторых, большое число параллельных ветвей (2а) и отпаек-концов при большом числе пар полюсов (2а = 2р) и, в-третьих, постоянство коэффициента трансформации k = wp/wr
Внутренний статор 5 набирается из листов электротехнической стали на цилиндрическом выступе одного из подшипниковых щитов. Он служит для уменьшения магнитного сопротивления на пути основного (рабочего) магнитного потока, проходящего через воздушный зазор. Полый ротор двигателя 2 изготовляется в виде тонкостенного цилиндра из немагнитного материала, чаще из сплавов алюминия. Своим дном ротор жестко укрепляется на оси 7, которая свободно вращается в подшипниках, расположенных в подшипниковых щитах 3. Толщина стенок ротора зависит от мощности двигателя и колеблется в пределах от 0,1 до 1 мм. Вследствие весьма малой массы ротор обладает незначительным моментом инерции, что является очень ценным свойством двигателя с полым немагнитным ротором, способствующим его широкому распространению. Между стенками ротора и статорами имеются воздушные зазоры, которые обычно составляют 0,15...0,25 мм.
|
|
|

Двигатели мощностью менее 3 Вт изготовляются несколько иначе. Их обмотки возбуждения и управления размещаются в пазах внутреннего статора, и тогда внешний статор не имеет пазов и служит лишь для уменьшения магнитного сопротивления. При такой конструкции весьма облегчается процесс укладки обмоток в пазы при малых диаметрах расточки статора и несколько повышается вращающий момент, но диаметр ротора для увеличения обмоточного пространства на внутреннем статоре приходится несколько увеличить, что обусловливает некоторое увеличение момента инерции ротора. Для устранения этого недостатка иногда используется третья конструктивная форма двигателя: одна из обмоток размещается на внутреннем, а другая - на наружном статоре.
Характерной особенностью двигателей с полым немагнитным ротором является большой магнитный промежуток δ на пути потока между наружным и внутренним статорами, который состоит из двух зазоров: δ 1 - между внешним статором и ротором и δ2 - между внутренним статором. Кроме того, ротор, будучи немагнитным, тоже является воздушным зазором Δ. Таким образом, общий размер немагнитного воздушного промежутка между внешним и внутренним статорами δ = δ 1+ δ2 + Δ составляет 0,4... 1,5 мм.
|
|
|
Из-за большого немагнитного промежутка двигатели с полым немагнитным ротором имеют большой намагничивающий ток (0,8... 0,9) I н и низкий коэффициент мощности cosφ. Большая сила намагничивающего тока приводит к большим электрическим потерям в обмотках двигателя и значительно снижает его КПД. С целью уменьшения электрических потерь двигатели с полым немагнитным ротором обычно конструируют так, чтобы до 70 % площади поперечного сечения статора у них занимали пазы с обмотками.
В отличие от всех остальных типов роторов, применяемых для асинхронных исполнительных двигателей переменного тока, полый немагнитный ротор при большом активном сопротивлении rр обладает весьма незначительным индуктивным сопротивлением хр = (0,05...0,1) r р. Это его свойство способствует значительному повышению линейности механических и регулировочных характеристик двигателей.
Принцип действия двигателя с полым немагнитным ротором состоит в следующем: переменный ток, протекая по обмоткам статора, создает вращающее магнитное поле, которое, пересекая полый ротор, наводит в нем вихревые токи; в результате взаимодействия этих токов с вращающимся магнитным полем двигателя возникает момент, который, действуя на ротор, увлекает его в сторону этого поля.
К положительным свойствам двигателей с полым немагнитным ротором следует отнести:
· малый момент инерции ротора, что в совокупности со значительным пусковым моментом обеспечивает быстродействие двигателя. Электромеханические постоянные времени ТM подавляющего большинства современных двигателей не превышают 60 мс;
· сравнительно хорошую линейность механических и регулировочных характеристик. У большинства двигателей нелинейность ц0 5 лежит в пределах от 0,05 до 0,15, что обеспечивает устойчивую работу двигателя почти при всех частотах вращения и кратность регулирования nmax/nmin= 100...200;
· высокую чувствительность - малый сигнал трогания, что обеспечивается малым моментом инерции ротора, малой его массой, большим пусковым моментом и отсутствием радиальных сил притяжения ротора к статору. Последнее объясняется тем, что ротор немагнитный;
· плавность и бесшумность хода, постоянство пускового момента в любом положении ротора, что определяется отсутствием пазов на роторе, а следовательно, зубцовых гармоник поля.
|
|
|
К недостаткам двигателей с полым немагнитным ротором относятся:
низкий КПД; у большинства двигателей даже в номинальном режиме ηн = 0,2...0,4 и значительно уменьшается при регулировании. Низкий КПД объясняется большими электрическими потерями в обмотке статора вследствие большого намагничивающего тока и полом роторе вследствие его большого активного сопротивления;
низкий коэффициент мощности (cosφ = 0,2...0,4) вследствие большого немагнитного промежутка между наружным и внутренним статорами;
большие габариты и масса, обусловленные первыми двумя недостатками. По габаритам и массе двигатель с полым немагнитным ротором больше силовых асинхронных двигателей и исполнительных двигателей постоянного тока той же номинальной мощности в 2- 4 раза.
Исследование АДПР:
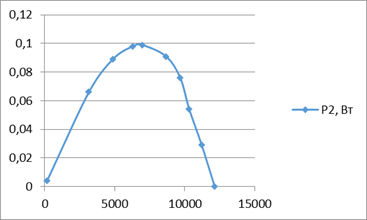
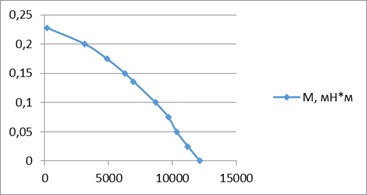
Рабочие характеристики
| Uв=Uвн=36В | Uу=Uун=30В | ||||||||||
| Эксперимент | n,об/мин | ||||||||||
| M, мН*м | 0,025 | 0,05 | 0,075 | 0,1 | 0,136 | 0,15 | 0,175 | 0,2 | 0,228 | ||
| Расчет | P2, Вт | 0,029 | 0,054 | 0,076 | 0,091 | 0,099 | 0,098 | 0,089 | 0,066 | 0,004 |
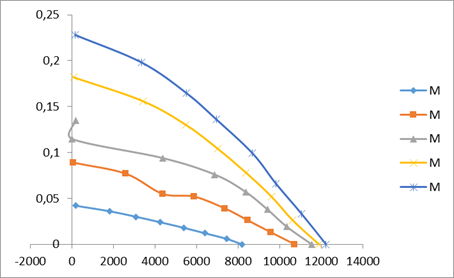
Механические характеристики
| Uв=Uвн=36В | Uу=Uун=30В | |||||||||
| Uy | Uyn | |||||||||
| 0,2 | n,об/мин | |||||||||
| M, мН*м | 0,006 | 0,012 | 0,018 | 0,024 | 0,03 | 0,036 | 0,042 | |||
| 0,4 | n,об/мин | |||||||||
| M, мН*м | 0,013 | 0,026 | 0,039 | 0,052 | 0,055 | 0,077 | 0,089 | |||
| 0,6 | n,об/мин | 3,303 | ||||||||
| M, мН*м | 0,019 | 0,038 | 0,057 | 0,076 | 0,094 | 0,115 | 0,135 | |||
| 0,8 | n,об/мин | |||||||||
| M, мН*м | 0,026 | 0,052 | 0,078 | 0,104 | 0,13 | 0,0156 | 0,182 | |||
| n,об/мин | ||||||||||
| M, мН*м | 0,033 | 0,066 | 0,099 | 0,136 | 0,165 | 0,198 | 0,228 |
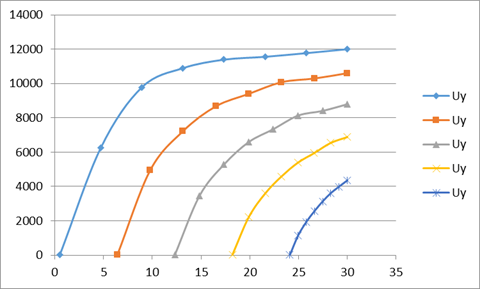
Регулировочные характеристики
| Uв=Uвн=36В | |||||||||
| M, мН*м | |||||||||
| Uy, B | 0,51 | 4,72 | 8,93 | 13,14 | 17,35 | 21,56 | 25,77 | ||
| n,об/мин | |||||||||
| 0,0458 | Uy, B | 6,41 | 9,78 | 13,15 | 16,52 | 19,89 | 23,26 | 26,63 | |
| n,об/мин | |||||||||
| 0,0916 | Uy, B | 12,31 | 14,84 | 17,35 | 19,88 | 22,41 | 24,94 | 27,47 | |
| n,об/мин | |||||||||
| 0,1374 | Uy, B | 18,21 | 19,89 | 21,57 | 23,25 | 24,93 | 26,61 | 28,29 | |
| n,об/мин | |||||||||
| 0,1832 | Uy, B | 24,11 | 24,95 | 25,79 | 26,63 | 27,47 | 28,31 | 29,15 | |
| n,об/мин | |||||||||
| 0,136 | Uy, B | 18,03 | 19,74 | 21,45 | 23,16 | 24,87 | 26,58 | 28,29 | |
| n,об/мин |
|
|
|
Вывод: Сравнив полученные характеристики АДПР со справочными, можно увидеть, что они практически полностью совпадают. Численные значения находятся в тех же диапазонах, характер кривых совпадает.
Студент: Глущенко К.В. ИАФ V-2
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 4467; Нарушение авторских прав?; Мы поможем в написании вашей работы!