КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вопорс 39 4 страница
|
|
|
|
Наклон внешней характеристики к оси абсцисс (жесткость внешней характеристики) оценивается номинальным изменением напряжения генератора при сбросе нагрузки:
(обычно для генератора независимого возбуждения Δ Uном =5-10%, а для генератора параллельного возбуждения Δ Uном =10-30%).
Регулировочная характеристика показывает, каким следует поддерживать ток возбуждения Iв при различных нагрузках генератора, чтобы его напряжение было постоянным, т.е.
IB=f(IH) при U=const и n=const
Регулировочные характеристики (рис.8.11.) обратны кривым внешних характеристик генераторов постоянного тока.
С увеличением I ток IВ необходимо несколько увеличивать, чтобы компенсировать влияние падения напряжения IЯRЯ и реакции якоря.
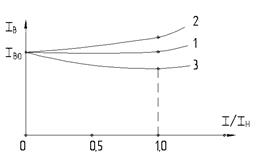 Рис. 8.11. Регулировочные характеристики, генераторов постоянного тока: I - независимого возбуждения; 2 - параллельного; 3 - смешанного
Рис. 8.11. Регулировочные характеристики, генераторов постоянного тока: I - независимого возбуждения; 2 - параллельного; 3 - смешанного
Режим двигателя. Благодаря обратимости электрических машин генераторный режим машины может быть изменен на двигательный. Особенно просто такое изменение режима осуществляется в генераторе с параллельным возбуждением, работающем на сеть постоянного тока. Для этого достаточно уменьшить ток возбуждения настолько, чтобы ЭДС якоря стала меньше напряжения сети. Преобладание напряжения сети вызовет изменение направления тока в обмотке якоря IЯ, который в таких условиях будет создаваться разностью напряжения сети и ЭДС якоря, т.е.
IЯ=(Е–ЕЯ)/RЯ
Этот ток, взаимодействуя с магнитным полем машины, будет создавать не тормозной, а вращающий электромагнитный момент.
Вопрос 58, Свойства двигателей, как и генераторов, определяются способом возбуждения.
По способу возбуждения двигатели постоянного тока по аналогии с генераторами подразделяют на двигатели с электромагнитным и магнитоэлектрическим возбуждением. В зависимости от схемы включения обмоток возбуждения двигатели с электромагнитным возбуждением подразделяются на двигатели с независимым, параллельным, последовательным и смешанным возбуждением (рис. 8.13).
|
|
|
Двигатели параллельного возбуждения (рис. 8.14 а). Скоростная и механическая характеристики двигателя определяются равенствами (8.21) и (8.23) при U=const и IB=const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными.
Ввиду того, что изменение Ф относительно мало, механические характеристики n=f(M) двигателя параллельного возбуждения, определяемые равенством (8.23) при U=const и IB=const совпадают по виду с характеристиками n=f(IЯ). По этой же причине эти характеристики практически прямолинейны [рис. 8.13 прямая 1(║)].
Изменение частоты вращения при переходе от холостого хода к номинальной нагрузке у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2-8% от nН. Такие слабо падающие характеристики называются жёсткими.
Пренебрегая влиянием реакции якоря, можно считать, что в двигателе с параллельным возбуждением при U=const и IB=const магнитный поток Фδ постоянен, а зависимость M=C·Фδ· IЯ = f(IЯ) изображается прямой линией 1(рис. 8.13).
Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы частота вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и пр.).
Двигатели последовательного возбуждения. В двигателе последовательного возбуждения ток якоря одновременно является также током возбуждения: 
Поэтому поток Фδ изменяется в широких пределах и можно написать, что  (8.24)
(8.24)
При использовании соотношения (8.24) для двигателя последовательного возбуждения вместо выражений (8.21), (8.23) и (8.22) получим:
|
|
|
 (8.25),
(8.25),  (8.26)
(8.26)
 (8.27)
(8.27)
Скоростная характеристика двигателя [см. выражение (8.25)], представленная на рис. 8.13 [кривая 2(посл)] является мягкой и имеет гиперболический характер.
Из графика [рис. 8.13 кривая 2(посл)] видно, что при малой (25%) нагрузке частота вращения резко возрастает и становится опасной для механической прочности двигателя. Двигатель «идет в разнос», поэтому двигатели с последовательным возбуждением нельзя пускать в ход вхолостую или при нагрузке менее 25%.
Поскольку у двигателей с параллельным возбуждением M~I, а у двигателей с последовательным возбуждением M~I2, то последние развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения (кривая 2, рис. 8.13). Кроме того, у двигателей параллельного возбуждения n≈const, а у двигателей последовательного возбуждения согласно (8.25) и (8.26)

Поэтому у двигателей параллельного возбуждения  ,а у двигателей последовательного возбуждения
,а у двигателей последовательного возбуждения 
Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения.
Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту. В связи с этим двигатели последовательного возбуждения имеют существенное преимущество в случае тяжёлых условий пуска и изменения нагрузки в широких пределах.
Они широко применяются для электрической тяги (трамвай, метро, троллейбус, электровозы и тепловозы на железных дорогах) и в подъёмно-транспортных установках.
Двигатели смешанного возбуждения (рис. 8.14 в). При встречном включении последовательной обмотки возбуждения двигателя смешанного возбуждения поток Ф с увеличением нагрузки будет уменьшаться. Вследствие этого характеристики n=f(I) и n = f(M) будут иметь вид 3' на рис. 8.13. Так как работа при этом обычно неустойчива, то двигатели с встречным включением последовательной обмотки возбуждения не применяются.
При согласном включении последовательной обмотки возбуждения поток Ф с увеличением нагрузки возрастает. Поэтому такой двигатель имеет более мягкую механическую характеристику по сравнению с двигателем последовательного возбуждения – рис. 8.13, кривая 3 (СМ).
|
|
|
Двигатели смешанного возбуждения применяются в условиях, когда требуется большой пусковой момент, быстрое ускорение при пуске и допустимы значительные изменения скорости вращения при изменении нагрузки.
В связи с этим двигатели смешанного возбуждения применяются для привода на постоянном токе компрессоров, строгальных станков, печатных машин, прокатных станов, подъемников и т.д. В последнее время двигатели смешанного возбуждения используются также для электрической тяги, так как при этом легче чем в случае применения двигателей последовательного возбуждения, осуществляется торможение подвижных составов с возвращением энергии в контактную сеть постоянного тока путем перевода машины в генераторный режим работы.
Зависимость n = f1(IЯ) [см. формулу (8.21)] называется скоростной характеристикой:
 ,где n0=U/CEФ0 - частота вращения при идеальном холостом ходе.
,где n0=U/CEФ0 - частота вращения при идеальном холостом ходе.
В двигателе с параллельным возбуждением (рис. 8.13 а) можно считать, что
IВ=constUФ0= const.
Поэтому зависимость n = f1(IЯ) линейная [рис. 8.12].
В двигателе с последовательным возбуждением (рис. 8.14 б), если пренебречь насыщением магнитной цепи, магнитный поток будет пропорционален току якоря IЯ,т.е.
Ф0=C /∙IЯ
откуда n=(U-IЯRЯ)/C//∙IЯ представляет собой гиперболическую (мягкую) характеристику (C/ и C// - постоянные коэффициенты).
Из графика (рис.8.14, кривая 2) видно, что при малой нагрузке (менее 25%) частота вращения резко возрастает и становится опасной для механической прочности двигателя. Двигатель «идет в разнос», поэтому двигатели с последовательным возбуждением
нельзя пускать вхолостую или при загрузке менее 25%.
Моментная характеристика М= f(IЯ) определяется выражением:
n=U/C1Ф0-М(RЯ+RР)/СМСЕФ02=n0–М(RЯ+RР)/СМСЕФ02
Пренебрегая влиянием реакции якоря, можно считать, что в двигателе с параллельным возбуждением (рис. 8.13 а) при U=const и IВ = const магнитный поток постоянный, а зависимость М=СФ0IЯ=f2(IЯ) изображается прямой линией (рис. 8.14 кривая 1). В двигателе с последовательным возбуждением Ф0=f(IЯ), следовательно М=φ(IЯ2), т.е. моментная характеристика имеет параболический характер (рис. 8.14 кривая 2). Для двигателя со смешанным возбуждением моментная характеристика будет иметь промежуточный вид.
|
|
|
Кривая КПД η= f3(IЯ) имеет обычный вид для всех зависимостей (рис.8.13 кривая 4).
Механической характеристикой двигателя называется зависимость ω=f(М) или n=f/(М). Уравнение механической характеристики можно получить из выражения (8.23)
Механические характеристики подобны скоростным характеристикам, так как электромагнитный момент пропорционален току якоря.
Анализ рабочих и механических характеристик позволяет определить области применения двигателей постоянного тока.
Двигатели с параллельным возбуждением обеспечивают устойчивость частоты вращения при различных нагрузках (механическая характеристика жесткая) и дают возможность плавного регулирования частоты вращения. Они используются для электроприводов прокатных станов, компрессоров.
Двигатели с последовательным возбуждением широко применяются в качестве тяговых двигателей (на транспортных средствах, подъемных кранах, лифтах). Для устранения опасности «разноса» такие двигатели часто снабжают добавочной параллельной обмоткой, т.е. двигатели с последовательным возбуж-дением превращают в двигатели со смешанным возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток возбуждения, их характеристики могут приближаться к характеристикам двигателей параллельного или последовательного возбуждения.
Вопрос 59 Пуск двигателей постоянного тока
При пуске в ход необходимо:
обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения;
предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход:
прямой пуск, когда цепь якоря подключается непосредственно к сети на её полное напряжение;
пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря;
пуск при номинальном напряжении цепи якоря.
Самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений ПР (рис.8.14)
При работе двигателя ток в цепи якоря (8.18)
 (8.28)
(8.28)
Напряжение U и сопротивление обмотки якоря RЯ –величины постоянные.
В начальный момент пуска (n=0, Е=0) пусковой ток якоря
IП=U/(RЯ+RВ), (8.28)
где RВ – сопротивление пускового реостата, или пусковых сопротивлений.
Для снижения мощности потерь в якоре, его обмотку изготавливают из медных проводов с малым сопротивлением (порядка десятых - сотых долей Ома). Поэтому пусковой ток в 10 – 50 раз превышает номинальный. Такой большой пусковой ток весьма опасен для двигателя:
- во-первых, он может вызвать в машине «круговой огонь», что весьма опасно для коллектора и щеток;
- во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить;
- в-третьих, большой пусковой ток вызывает также разное падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включённых в эту сеть.
Напряжение сети может снизится, что отрицательно действует на других потребителей. Ввиду этого прямой пуск возможен для двигателей малой мощности (до 1 кВт), разгон которых происходит быстро, а их обмотки не успевают нагреться.
Реостатный пуск двигателя – получил наибольшее распространение, когда в цепь якоря вводится добавочное сопротивление – пусковой реостат ПР, включенный последовательно в цепь якоря (рис.8.14 а, в). Значение сопротивления пускового реостата выбирается из условия ограничения пускового тока до значения: IП≤(2÷2,5)IН . Тогда IП=U/(RЯ+RП)≤(2÷2,5)IН, а сопротивление пускового реостата
RП≥0,4(U/IН)-RЯ.
Для обеспечения необходимого пускового момента при ограниченном пусковом токе важно, чтобы магнитный поток был максимальным. Так как вращающий момент двигателя М прямо пропорционален потоку [см. (8.9)]  (8.30)
(8.30)
То для облегчения пуска двигателя параллельного и смешанного возбуждения (рис. 8.13 а, в) сопротивление реостата в цепи возбуждения RВ следует полностью вывести (RВ =0) – положение 1. Поток возбуждения в этом случае получает наибольшее значение и двигатель развивает необходимый вращающий момент при меньшем токе якоря. По мере разгона ЭДС возрастает, ограничивая величину тока, а вращающий момент уменьшается. Исходя из этого, реостаты RП и RВ следует постепенно выводить в рабочее положение 2.
Применять пусковые реостаты для двигателей большой мощности нецелесообразно, так как это вызвало бы значительные потери энергии. Поэтому в двигателях большой мощности применяют реостатный пуск путём понижения напряжения. Примером тому является пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске (рис. 8.14 б) на параллельное (рис. 8.14 а) при нормальной работе или пуск двигателя по схеме «генератор-двигатель».
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Регулирование частоты вращения. При работе двигателя часто возникает необходимость регулирования частоты вращения n.
Способы регулирования частоты вращения двигателей постоянного тока следуют из соотношений (8.21) и (8.23). Возможны три способа изменения частоты путём регулирования: сопротивления в цепи якоря (реостатное), потока Ф0 (полюсное) и напряжении U.
Реостатное регулирование позволяет изменять частоту вращения только в сторону ее уменьшения от номинального значения. Этот способ связан со значительными потерями в сопротивлении RР и понижением КПД.
Дополнительное сопротивление RР включают в цепь якоря аналогично пусковому реостату ПР. При включении сопротивления RР в цепь якоря выражение частоты вращения (EЯ=CeФn):
 после подстановки (U=EЯ+IЯRЯ) получим (об/мин):
после подстановки (U=EЯ+IЯRЯ) получим (об/мин):
 (8.31)где n0=U/(CeФ) – частота вращения в режиме холостого хода; ∆n=IЯ(RЯ+RР)/(СеФ) - изменение частоты вращения, вызванное падением напряжения в цепи якоря.
(8.31)где n0=U/(CeФ) – частота вращения в режиме холостого хода; ∆n=IЯ(RЯ+RР)/(СеФ) - изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением RР возрастает ∆n, что ведет к уменьшению частоты вращения. Зависимость n=f(RР) иллюстрируется также и механическими характеристиками двигателя параллельного возбуждения (рис. 8.15 а) и двигателя последовательно-го возбуждения (рис. 8.15 б): с повышением RР увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (М=МНОМ) уменьшается. Этот способ, как уже отмечалось выше, обеспечивает плавное регулирование частоты вращения в широком диапазоне только в сторону уменьшения частоты от номинальной.
Естественные (RР=0) и искусственные (RР>0) механические зависимости двигателей приведены на рис. 8.15.
В качестве добавочного сопротивления RР может быть использован пусковой реостат ПР, рассчитанный на продолжительный режим работы. По реостату RР проходит полный ток якоря, что связано с большими потерями (∆РЭ=I2RР), поэтому реостатный способ неэкономичен и рекомендуется только для двигателей малой мощности.
Полюсное регулирование осуществляется изменением тока возбуждения IП при введении в цепь возбуждения регулировочного реостата RВ (рис. 8.12.). Данный способ регулирования частоты вращения реализуется путём изменения потока Ф, т. е. тока возбуждения IВ.
Рассматриваемый способ позволяет регулировать скорость вверх относительно номинальной. При таком регулировании КПД двигателя остаётся высоким, так как мощность возбуждения мала.
Верхний предел регулирования частоты вращения ограничивается механической прочностью машины и условиями её коммутации.
Для получения аналитического выражения, описывающего возможности полюсного регулирования [или механической характеристики n=f(M) ] преобразуем выражение (8.21):
 (8.32) подставив в него из (8.22) или (8.9) значение тока якоря
(8.32) подставив в него из (8.22) или (8.9) значение тока якоря
 (8.32 а) получим:
(8.32 а) получим:  (8.33)
(8.33)
где n0 – частота вращения в режима холостого хода; ∆n – изменение частоты вращения, вызванное изменением нагрузки на валу двигателя и сопротивления RР.
Из уравнения (8.33) следует, что частота вращения обратно пропорциональна потоку возбуждения. С увеличением Ф0 (U=const) частота вращения n0 при холостом ходе уменьшается. Магнитный же поток на ненасыщенном участке пропорционален току возбуждения (рис. 8.16.).
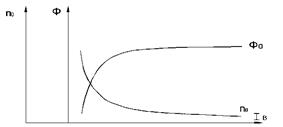
Рис. 8.16 Зависимость потока и частоты вращения холостого хода от тока возбуждения.
Следовательно, при увеличении сопротивления RВ ток возбуждения IВ и магнитный поток уменьшаются, а частота вращения увеличивается (рис. 8.17.)
При полюсном регулировании, анализируя механические характеристики (рис. 8.17), находим, что в двигателе с параллельным возбуждением при значительном уменьшении тока возбуждения или обрыве цепи возбуждения (RВ=0…∞) резко возрастает частота вращения – двигатель «идет вразнос».
В двигателе с последовательным возбуждением недопустимое возрастание скорости происходит при малых нагрузках. Включение регулировочного реостата Rш в двигателе с последовательным возбуждением показано на рис. 8.18..
Включение реостата Rш, шунтирующего обмотку возбуждения ОВ, а также уменьшение сопротивления ведет к снижению тока возбуждения IВ=IЯ-IШ, а, следовательно [см. формулу (8.32)], к росту частоты вращения n (так как ∆n↓). Регулирование частоты вращения изменением напряжения требует отдельного источника питания. Оно осуществляется в системе «генератор – двигатель». Механические характеристики при изменении подводимого напряжения аналогичны характеристикам, показанным на рис. 8.17 б.
В двигателях со смешанным возбуждением регулирование частоты вращения осуществляется теми же способами, что и в двигателях параллельного возбуждения.
Вопрос 60. Для изменения направления вращения двигателя, или его реверсирования, нужно изменить знак вращающего момента М=СМФ0IЯ. Как следует из уравнения, для этого необходимо изменить направление тока якоря IЯ или направление магнитного потока Ф0.
Поэтому для реверсирования следует переключить (поменять местами) провода, присоединенные к зажимам якоря, при сохранении направления тока в обмотке возбуждения, либо изменить полярность полюсов при сохранении направления тока в якоре.
Известны три вида торможения: противовключением, динамическое и рекуперативное.
Торможение противовключением применяется в случаях экстренной остановки двигателя с последующим изменением направления его вращения. С этой целью изменяют направление тока в обмотке якоря или в обмотке возбуждения.
Динамическое торможение производится отключением якоря от сети и замыканием его на разрядное сопротивление, причем ток возбуждения остается без изменения.
Рекуперативное торможение (с возвратом энергии в сеть) можно получить при скорости двигателя ω, большей скорости его идеального холостого хода ω0. Условие ω>ω0 может быть получено за счет ускорения вращения якоря внешним моментом со стороны рабочей машины (например, в подъемно – транспортных механизмах при движении под уклон или опускании груза). В этом случае ЭДС становится больше напряжения. Ток двигателя меняет направление
IЯ=(U-E)/RЯ,
и момент превращается в тормозной. Такой вид торможения не может привести к полной остановке двигателя, а лишь ограничивает частоту вращения до значения ω0.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 402; Нарушение авторских прав?; Мы поможем в написании вашей работы!