КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вращение ротора ТАД
|
|
|
|
В ТАД вращающееся магнитное поле статора пересекает проводники обмоток ротора и по закону электромагнитной индукции наводит в них ЭДС взаимоиндукции, которая определяется по следующей формуле:
E = B l n,
где B — магнитная индукция поля статора;
l — длина проводника ротора;
n — скорость пересечения проводника ротора магнитными силовыми линиями поля статора.
Допустим, магнитное поле вращается по часовой стрелке, а ротор с проводниками в момент пуска двигателя неподвижен. Для пояснения принципа работы двигателя предположим, что магнитное поле статора неподвижно, а ротор вращается против часовой стрелки (рисунок 7.6, а). Учитывая это, по правилу правой руки определяем, что возникшая ЭДС в проводнике ориентирована на нас (изображена точкой). Если обмотка замкнута, то по ней потечет ток ротора (I 2), ориентированный так же, как и ЭДС, т.е. на нас. При этом на проводник будет действовать сила, которая определяется по закону электромагнитной силы — закону Ампера по формуле:
F 1 = В l I 2,
где I 2 — сила тока, протекающего по проводнику ротора.
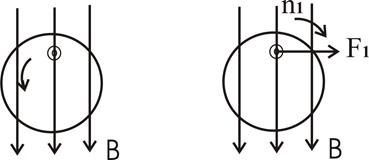
Рисунок 7.6 — Пояснение принципа действия ТАД
Направление этой силы определяется по правилу левой руки. Как видно из рисунка 7.6, направление силы F и направление вращения магнитного поля (n 1) совпадают. Под действием этой силы появляется момент вращения ротора
M вр = F 1 N 2  ,
,
где D — диаметр ротора, N 2 — число проводников ротора.
Ротор двигателя начнет вращаться со скоростью n 2, которая всегда принципиально меньше скорости вращения магнитного поля статора n 1. Если допустить, что n 1 = n 2, то магнитное поле статора не будет пересекать проводники ротора, и в них не будут возникать ЭДС и токи. Это приведет к тому, что исчезнут сила F 1 и момент вращения ротора М вр = 0, а частота вращения ротора n 2 уменьшится относительно n 1. Это приведет опять к тому, что магнитное поле статора начнет пересекать проводники ротора, и появятся e, F 1 и М вр. Ввиду того что у двигателя принципиально n 1 > n 2, такие электрические машины называются асинхронными (несинхронными) и введен специальный параметр s — скольжение, который определяется по формуле:
|
|
|
 .
.
Откуда частота вращения ротора
n 2 = n 1(1 - s) =  (1 - s).
(1 - s).
Исходя из этой формулы, частоту вращения двигателя можно регулировать следующими способами:
1) изменением частоты питающей сети (f), например, с помощью преобразователей частоты;
2) изменением числа пар полюсов (р), что можно осуществить коммутационным методом, переключением катушек фазных обмоток с последовательного соединения на параллельное и наоборот;
3) изменением скольжения (s), что осуществимо в двигателях с фазным ротором (изменением сопротивлений реостатов), а при короткозамкнутом роторе изменением питающего напряжения U 1.
Все эти три способа трудноосуществимы и требуют дополнительных затрат. Это является существенным недостатком асинхронных двигателей.
Свойства двигателя в рабочем режиме определяются рабочими характеристиками. Рабочие характеристики представляют следующие зависимости: потребляемой мощности Р 1; потребляемого тока I 1; коэффициента мощности cosj1; коэффициента полезного действия (КПД) h; момента вращения М вр; частоты вращения n 2; скольжения s от полезной мощности на валу двигателя Р 2 при номинальном напряжении U 1 и постоянной частоте f питающей сети.
Полезная механическая мощность
Р 2 = w2 М, Вт,
где w2 =  — угловая скорость двигателя или круговая частота вращения, рад/с;
— угловая скорость двигателя или круговая частота вращения, рад/с;
n 2 — скорость вращения ротора, об/мин.
Рабочие характеристики определяются для области устойчивой работы, как правило, экспериментальным путем. Примерный вид рабочих характеристик показан на графиках (рисунок 7.8).
|
|
|

Рисунок 7.8 — Рабочие характеристики
Поясним некоторые рабочие характеристики. Частота вращения n 2 при изменении нагрузки 0 < Р 2 < Р 2н уменьшается незначительно, так как механическая характеристика у ТАД жесткая и скольжение при номинальной нагрузке невелико (s н = 4…8 %) [3].
Момент вращения, как видно из рисунка (7.8), связан с полезной мощностью простым соотношением по линейному закону. Поэтому зависимость М вр = f (P 2) носит почти линейный характер. Однако при Р 2 = 0, момент вращения не равен нулю, т.к. в двигателе существуют потери энергии и М вр = М пот (момент потерь).
Потребляемый из сети ток I 1 на холостом ходу создает ВМП и имеет малую активную и большую реактивную составляющие. С ростом нагрузки активный ток увеличивается и становится больше реактивного.
Активная потребляемая мощность Р 1 на холостом ходу мала и расходуется на покрытие потерь механических и в магнитопроводе. С увеличением нагрузки растут потребляемый активный ток и активная потребляемая мощность.
Коэффициент мощности двигателя определяется по известной формуле:
cosj1 =  ,
,
где S 1, P 1, Q 1 — полная, активная и реактивная мощности двигателя.
Скольжение s с ростом нагрузки увеличивается, так как уменьшается скорость вращения двигателя.
Коэффициент полезного действия (КПД) определяется, как обычно, отношением полезной мощности (механическая мощность на валу двигателя) Р 2 к затраченной, т.е. потребляемой из сети Р 1:
h =  ,
,
где U 1, I 1 — линейные напряжение и ток;
j1 — угол сдвига фаз между линейным напряжением и током.
Механической характеристикой (МХ) двигателя является зависимость частоты вращения от момента нагрузки на валу при постоянных значениях напряжения U 1 и частоты питающей сети f, т.е.
n 2 = f (M).
МХ, по существу, является обратной зависимостью по отношению к зависимости момента вращения от скольжения, показанной на рисунке 8.10.
Действительно, при s = 0 получим n 2 = n 1, а при s = 1, n 2 = 0. Поэтому, если перенести ось ординат в точку s = 1, получим n 2 = 0, повернув оси координат на 90° по часовой стрелке, получим механическую характеристику n 2 = f(M), приведенную на рисунке 7.8, б.
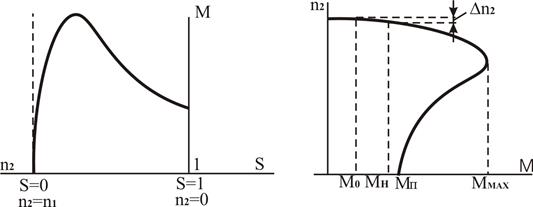
а) б)
Рисунок 7.8 — Механическая характеристика ТАД
|
|
|
Видим, что при изменении момента нагрузки на валу от нуля до номинального (0 < М < М н) скорость вращения изменяется всего лишь на несколько процентов от скорости вращения ВМП. Такая механическая характеристика считается жесткой. Это обусловлено тем, что скольжение s на холостом ходу двигателя около 1 %, а в номинальном режиме — 4–8 %. Отсюда уменьшение скорости вращения в рабочем диапазоне нагрузок
D n 2 = n 1 – n 2» (0,01…0,1) n 1.
Величину момента вращения для любого скольжения s можно вычислить по приближенной формуле:
 ,
,
где M max = M н К м — максимальный момент вращения;
M н =  — номинальный момент вращения;
— номинальный момент вращения;
s кр = s н(К м+  ) — критическое скольжение;
) — критическое скольжение;
P 2н, n 2н — номинальные мощность и частота вращения.
Эта формула дает малые погрешности при малых s. При значительном скольжении, когда s > 0,5, погрешности велики.
ТАД также можно включать в однофазную сеть. Есть несколько схем включения ТАД в однофазную сеть. Одна из них показана на рисунке 7.9, а, когда в одну из обмоток включается конденсатор.
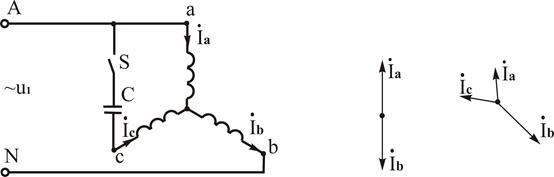
а) б) в)
Рисунок 7.9 — Включение ТАД в однофазную сеть
При выключенном ключе S токи будут протекать только по обмоткам A и B и векторная диаграмма токов будет соответствовать показанной на рисунке 7.9, б. Такая система токов создает пульсирующее магнитное поле, которое не имеет пускового момента. Если ключ S включить, то в обмотку фазы С двигателя включается конденсатор, обеспечивающий фазовый сдвиг току  относительно
относительно  . В этом случае в соответствии с первым законом Кирхгофа для узла n (точка нейтрали двигателя)
. В этом случае в соответствии с первым законом Кирхгофа для узла n (точка нейтрали двигателя)
 +
+  =
=  =
=  ,
,
где — ток нейтрального провода.
Векторная диаграмма токов для этого случая, показанная на рисунке 7.9, в, создает эллиптическое вращающееся магнитное поле (при вращении поток пульсирует), что вызывает уменьшение момента вращения. Мощность конденсаторного ТАД, включенного в однофазную сеть, составляет 70–80 % от мощности при его включении в трехфазную сеть. Однако при этом сильно увеличиваются токи в обмотках. Здесь также целесообразно использовать рабочие (С р) и пусковые (С п) конденсаторы, ёмкость которых определяется как и для однофазных двигателей.
|
|
|
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 1270; Нарушение авторских прав?; Мы поможем в написании вашей работы!