КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механическая характеристика
|
|
|
|
Ротор.
Многофазные асинхронные двигатели.
АСИНХРОННЫЕ МАШИНЫ
Пуск.
В отсутствие вращения момент на валу синхронного двигателя равен нулю. Чтобы он заработал, нужно довести его до частоты вращения, близкой к синхронной. Это можно сделать при помощи вспомогательного двигателя. Если синхронный двигатель служит приводным двигателем генератора постоянного тока, то последний можно использовать в качестве двигателя для разгона синхронного двигателя до синхронной частоты. Пуск синхронного двигателя можно также осуществлять при помощи асинхронного двигателя.
В момент пуска ток обмотки якоря может в 3–8 раз превышать нормальное рабочее значение. Чрезмерное понижение напряжения источника питания предотвращают, понижая в этот период подводимое напряжение при помощи последовательно включаемого токоограничивающего реактора.
Принцип действия многофазных асинхронных двигателей состоит в том, что при определенном сдвиге по фазе между многофазными токами в многофазных обмотках они создают вращающееся магнитное поле. Такие многофазные обмотки обычно располагают в пазах на внутренней поверхности статора, набранного из тонких кольцевых пластин, стянутых по оси.
В случае трехфазного переменного тока синхронная частота вращения N вращающегося поля равна
N = (120 f) / P (об/мин),
где f – частота переменного тока, а Р – число полюсов.
Ротор многофазного асинхронного двигателя выполняется в виде шихтованного цилиндрического якоря, набранного из тонких кольцевых пластин с осевыми пазами. Существуют обмотки ротора двух видов: короткозамкнутая (типа «беличьей клетки») и фазная. Короткозамкнутая обмотка выполняется либо из медных стержней, заложенных в пазы и припаянных на концах к массивным торцевым кольцам, замыкающим их накоротко, либо из алюминиевых проводников в пазах и концевых колец, отлитых зацело непосредственно в сердечнике, помещенном в форму. Фазная обмотка состоит из отдельных обмоток для всех фаз, вложенных в пазы ротора, с выводами на токособирательные кольца. Щетки позволяют вводить в цепь ротора сопротивление для увеличения пускового момента, а иногда и для регулировки частоты вращения. Обычно статор – первичный элемент, к которому подводится питание, а ротор – вторичный, в котором наводятся токи.
|
|
|
Вращающееся магнитное поле, создаваемое многофазными токами статора, наводит токи в проводниках ротора. Направление наведенных токов таково, что они, взаимодействуя с индуцирующим их полем, создают вращающий момент, действующий в направлении вращающегося магнитного поля. Таким образом, ротор вращается вслед за полем. Но он не может вращаться с той же частотой, так как тогда наведенные токи были бы равны нулю, а значит, отсутствовал бы вращающий момент. Поэтому неизбежно и необходимо «скольжение» ротора. Скольжение s определяется равенством
s = (N – N 2)/ N,
где N 2 – частота вращения ротора. Например, если синхронная частота вращения N четырехполюсного 60-Гц асинхронного двигателя равна 1800 об/мин, а частота вращения ротора – 1728 об/мин, скольжение равно s = (1800 – 1728)/1800 = 0,04, т.е. 4%. Частота токов ротора равна sf, где f – частота токов в статоре. Например, в упомянутом двигателе частота токов в роторе равна 0,04ґ60 = 2,4 Гц.
Когда вал ротора нагружается, возникает потребность в увеличении тока в проводниках ротора. Для этого должна увеличиться скорость пересечения магнитного потока статора, а, следовательно, с увеличением нагрузки должно увеличиваться скольжение ротора. Поскольку частота ротора возрастает с увеличением его скольжения, токи, наводимые в проводниках ротора, все больше и больше сдвигаются по фазе относительно магнитного потока, так что, пройдя через максимум, вращающий момент уменьшается.
|
|
|
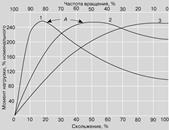
Это показано на рис. 14. Максимальный вращающий момент изменяется пропорционально квадрату сетевого напряжения и обратно пропорционально величине реактивного сопротивления ротора при нулевой частоте вращения, а следовательно, обратно пропорционально величинам индуктивности ротора и частоты статора; он не зависит от активного сопротивления ротора. Кривая 1 относится к двигателю с короткозамкнутым ротором. Пусковой момент (при скольжении 100%), как правило, равен полному моменту нагрузки или больше его. Двигатель с короткозамкнутым ротором прост, механически надежен, обладает высоким КПД и широко применяется в приводах с постоянной частотой вращения в тех случаях, когда не требуются большие пусковые моменты. Кривая 2 показывает, как влияет на характеристику увеличение сопротивления ротора. Максимальный вращающий момент не изменяется, но максимум смещается в сторону увеличения скольжения и, следовательно, уменьшения частоты вращения. Сделав сопротивление цепи ротора равным ее реактивному сопротивлению в отсутствие вращения, можно получить максимальный вращающий момент при пуске (кривая 3). Чтобы можно было вводить сопротивление в цепь ротора, нужен ротор с фазной обмоткой, концы которой были бы выведены на токособирательные кольца коллектора. Тогда с помощью внешнего реостата, выполняющего роль пускателя или контроллера, можно ввести в цепь ротора сопротивление и получить максимальный вращающий момент при пуске. После разгона ротора это сопротивление можно отключить, и тогда двигатель может работать на характеристике 1 или 2. Сопротивление фазного ротора не может быть сделано столь же малым, как обычное сопротивление короткозамкнутого, так что при прочих равных условиях скольжение такого ротора больше.
Двигатель с последовательным возбуждением, в котором возбуждение максимально при пуске и уменьшается после его разгона до нормальной частоты вращения, обеспечивает большой вращающий момент.
Двигатели с фазными роторами используются в тех случаях, когда требуются большие пусковые моменты, например, в электровозах и подъемниках, а также тогда, когда желательно регулирование частоты вращения.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 449; Нарушение авторских прав?; Мы поможем в написании вашей работы!