КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теоретичні відомості. Визначення прискорення сили тяжіння за допомогою перекидного маятника
|
|
|
|
Визначення прискорення сили тяжіння за допомогою перекидного маятника
Лабораторна робота № 1
Мета роботи: вивчення перекидного маятника, визначення прискорення сили тяжіння.
Обладнання: перекидний маятник, електронний секундомір, вимірювальна лінійка.
Фізичним маятником називається тверде тіло, яке під дією сили тяжіння здатне коливатись навколо горизонтальної осі (рис.1.1). Точка О перетину вертикальної площини, що проходить через центр мас маятника С, з горизонтальною віссю називається точкою підвісу. Відхилення маятника від положення рівноваги характеризується кутом  .
.
Будемо вважати, що моменти сил тертя та опору незвичні. В цьому випадку рух маятника визначається лише моментом сили тяжіння
 ,
,
де "а" - відстань ОС від точки підвісу до центру мас.
Застосовуючи основне рівняння динаміки обертального руху твердого тіла, матимемо;
 (1.1)
(1.1)
де  момент інерції маятника відносно осі О,
момент інерції маятника відносно осі О,  - кутове прискорення.
- кутове прискорення.
Для малих відхилень від положення рівноваги  , тому рівняння (1.1) набуде наступного вигляду:
, тому рівняння (1.1) набуде наступного вигляду:
 (1.2)
(1.2)
з урахуванням позначення


Розв'язок цього рівняння добре відомий - не гармонічні коливання з частотою  , тобто
, тобто
 , (1.3)
, (1.3)
де  - амплітуда коливань,
- амплітуда коливань,
 - початкова фаза. Рис. 4.1.Схема руху млинка
- початкова фаза. Рис. 4.1.Схема руху млинка
Період коливань фізичного маятника:
 (1.4)
(1.4)
Позначимо 
 як момент інерції маятника відносно осі, що проходить через центр мас С і паралельна до осі качання. Відповідно до теореми Штейвера,
як момент інерції маятника відносно осі, що проходить через центр мас С і паралельна до осі качання. Відповідно до теореми Штейвера,
 (1.5)
(1.5)
звідки
 (1.6)
(1.6)
Формулу (4.6), то виражає залежність періоду коливань. Т фізичного маятника від відстані "а" між точкою підвісу та центром мас, зручно поділи у такому вигляді:
що дозволяє з'ясувати поведінку функції T(a) при дуже великих ( ) і
) і
|
|
|
малих (а  0) значеннях "а". Очевидно, що при
0) значеннях "а". Очевидно, що при  тобто T(a)~
тобто T(a)~  . Для дуже малих значень "а" T(a) ~
. Для дуже малих значень "а" T(a) ~  . У цьому випадку кажуть, що при період T(a)
. У цьому випадку кажуть, що при період T(a)  , як ; при а 0 період також прямує до нескінченності, але на цей раз, як
, як ; при а 0 період також прямує до нескінченності, але на цей раз, як
Функція (1.6) неперервна на (0,  ) і прямує до нескінченності на краях інтервалу. Відповідно, вона повинна досягати деякого мінімального значення
) і прямує до нескінченності на краях інтервалу. Відповідно, вона повинна досягати деякого мінімального значення  за а є(0, ). Окрім того, формула (1.6) описує залежність T(а) як для прямого", так і для "оберненого" маятника. З огляду на ці міркування можна дуже просто побудувати графік функції Т(а), показаний на рис.1. 2.
за а є(0, ). Окрім того, формула (1.6) описує залежність T(а) як для прямого", так і для "оберненого" маятника. З огляду на ці міркування можна дуже просто побудувати графік функції Т(а), показаний на рис.1. 2.
Формула (1.6) дає можливість експериментально визначити прискорення сил тяжіння. Дійсно, підвішуючи маятник на різних відстанях  , і
, і  , від центру мас, можна виміряти відповідні періоди коливань Т
, від центру мас, можна виміряти відповідні періоди коливань Т  , і Т
, і Т  Використовуючи їй співвідношення (1.6), отримаємо систему рівнянь:
Використовуючи їй співвідношення (1.6), отримаємо систему рівнянь:


Якщо з рівнянь виключити J 0, то отримаємо:
 (1.7)
(1.7)
Осі Т слід вважати співпадаючими:  ;
;  . Одне і те ж саме значення періоду Т (за умови Т> ) досягається під час підвішування маятника в точках
. Одне і те ж саме значення періоду Т (за умови Т> ) досягається під час підвішування маятника в точках  .
.
Однак формулу (1.7) можна значно спростити. Припустимо, що нам вдалося знайти положення точок О2 і О  ,, розташованих по різні боки від центру мас (див. рис 1.2). У такому випадку
,, розташованих по різні боки від центру мас (див. рис 1.2). У такому випадку  , і формула (1.7) набирає простішого вигляду:
, і формула (1.7) набирає простішого вигляду:
 (1.8)
(1.8)
де 
Усі величини, що входять до формули (1.8), можуть бути легко виміряні з великим ступенем точності. Найбільшою складністю є визначення точок підвісу, в яких періоди "прямого" і "оберненого" маятників практично співпадають (звідси назва - перекидний)
Існує багато різноманітних конструкцій перекидного маятника, одна з яких зображена на рис.1 3. На сталевому стержні закріплено дві опорні призми (П. і П2 І і тягарці (Г, і Г,), переміщуючи які, можна у досить широких межах змінювали період. Нанесені па поверхню стержня шкали
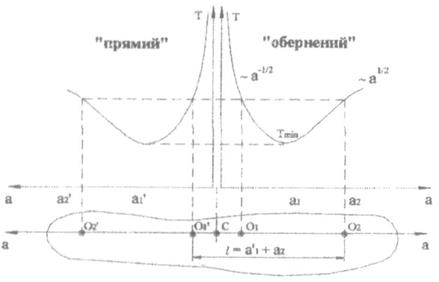
Рис.1.2. Залежність періоду коливань Т фізичною маятника від відстані "а" між точкою підвісу й центром мас.
|
|
|
Існує багато різноманітних конструкцій перекидного маятника, одна з яких зображена на рис.1 3. На сталевому стержні закріплено дві опорні призми (П1 і П2) і тягарці (Г1, і Г2), переміщуючи які, можна у досить широких межах змінювали період. Нанесені па поверхню стержня шкали визначають положення рухомих елементів конструкції, їх вплив па періоди Т1, і Т2, ілюструє рис.1.4. Видно, що переміщення П2 більше впливає на період Т 2ніж переміщення П1 на Т2,. При цьому положення центра мас майже не змінюється, оскільки призми досить легкі. Однак невеликий зсув тягарця Г2 у напрямку стрілки призводить до значного зміщення центра мас С. Це означає, що відстань а 2збільшується, а а 1на стільки ж зменшується. Обидва періоди зменшуються, однак Т2 значно швидше, завдяки чому їх можна вирівняти. Розглянемо ситуацію, коли в початковий момент Т1, > Т 2
Які тягарці необхідно переміщувати і в який бік, щоб вирівняти періоди? Чи можна це зробити? Переміщення тягарців змінює обидва періоди Т 1і Т2 в один і той же самий бік, чи в різні?
Періоди Т1, і Т 2можна так вирівняти, що їх різниця буде перебувати в межах випадкового розкиду результатів повторних вимірювань. Це дає змогу розглядати набір значень Т1 і Т 2як єдиний набір Т та розрахувати відповідне середнє значення <Т> і вибірковий стандарт середнього  Фактично ми розглядаємо Т1 -Т2 як випадкову похибку. Розглянемо, як випадкова похибка вимірювання позначиться на похибці
Фактично ми розглядаємо Т1 -Т2 як випадкову похибку. Розглянемо, як випадкова похибка вимірювання позначиться на похибці  .Для цього слід скористатися формулою (1.7) замість (1.8), яка не враховує відмінностей у періодах. Відповідний розрахунок приводить до такого результату:
.Для цього слід скористатися формулою (1.7) замість (1.8), яка не враховує відмінностей у періодах. Відповідний розрахунок приводить до такого результату:
 ,
,
де  - вибірковий стандарт середнього значення . Вираз для відносної похибки виглядає зовсім просто:
- вибірковий стандарт середнього значення . Вираз для відносної похибки виглядає зовсім просто:
 (1.9)
(1.9)
Аналогічно розраховується систематична похибці:

де  - систематичні похибки величин
- систематичні похибки величин 
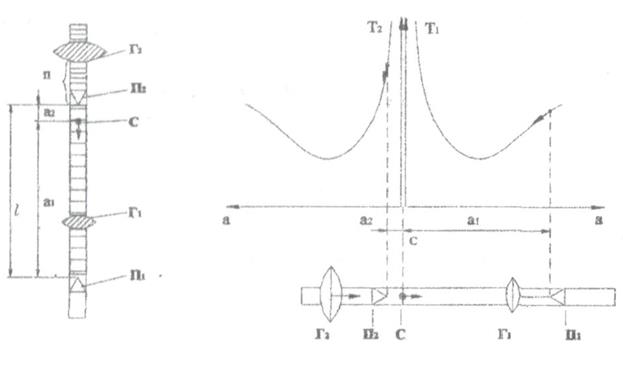 Рис.1. З Конструкція
Рис.1. З Конструкція
перекидного маятника
Рис.1.4. Вплив переміщення різних елементів перекидного маятника на значення періодів Т1 і Т2;С-центрмас;П1іП2 - рухомі опорні призми; Г1 і Г2 - рухомі тягарці.
Ці вирази показують, що відносна похибка необмежене зростає, якщо різниця а1-а2 прямує до нуля, тобто якщо  (рис.1.2). Тому планувати експеримент слід гак, щоб а1 і а2 відрізнялись одне від одного досить вагомо. Неважко, одначе, показати, що при значній відмінності а1, і а2 зростає затухання коливань, що призводить до пониження точності вимірювання періоду. Задовільні результати можна отримати, якщо вибрати 3>а1/аг> 1.5
(рис.1.2). Тому планувати експеримент слід гак, щоб а1 і а2 відрізнялись одне від одного досить вагомо. Неважко, одначе, показати, що при значній відмінності а1, і а2 зростає затухання коливань, що призводить до пониження точності вимірювання періоду. Задовільні результати можна отримати, якщо вибрати 3>а1/аг> 1.5
|
|
|
1.2, Порядок виконання роботи
1. Ознайомтесь з конструкцією перекидного маятника. Тягарець Г2 розмістіть якнайближче до призми П2.
2. Приведіть маятник у коливальний рух на одній з опорних призм так, щоб амплітуда коливань не перевищувала 10°. Період вимірюють за часом 10-ти коливань. При цьому не обов'язково щоразу визначати значення самих періодів, достатньо вимірювати час 10-ти коливань  , і
, і  при коливаннях на призмах П1 і П2 відповідно.
при коливаннях на призмах П1 і П2 відповідно.
3. Переміщуючи тягарець Г2 вздовж шкали, нанесеної на стержні, з кроком 1-2 поділки, виміряйте не менше трьох разів кожне з , і ; визначте відповідне кожній новій позиції Г2 середні значення <t1> і <t2>. Результати вимірювань занесіть до табл. 1. На аркуші міліметрового паперу побудуйте графіки залежності середніх значень <t1> і <t2> від n, де n - поділка шкали. Точка перетину цих кривих визначить оптимальне положення тягарця Г, при якому значення періодів Т1, і Т2, будуть найбільш близькими. Точку перетину позначте n0.
4. Прилаштуйте маятник на призму П2, а тягарець Г2 закріпіть у положенні n0. Прилаштуйте маятник у коливальний рух з відхиленням у межах кута 10° і виміряєте час t 50-ти коливань. Вимірювання проведіть тричі.
5. Підвісьте маятник на призму П1,не змінюючи положення тягарця. Повторіть вимірювання часу 50-ти коливань (три серії вимірів) (див. п. 4). Дані пп. 4, 5 занесіть до табл.1.2.
6. Для кожної з шести серій вимірювань визначте значення періоду коливань Т. Знайдіть середнє значення періоду <T>
7. Виміряйте параметр  - відстань між призмами П1 і П2.
- відстань між призмами П1 і П2.
8. За формулою (1.8) визначте прискорення вільного падіння <g>, підставляючи замість T його середнє значення <Т>.
9. Використовуючи вирази (1.9) і (1.10), оцініть похибку визначення <g>.
Таблиця 1.1
| На П1 | На П2 | |||
| n | 
| 
| 
| 
|
| … | ||||
|
|
|
Таблиця 1.2
| Час 50-ти коливань,с | Період Т,с |  ,с ,с
|  ,с ,с
| |
| n | Призма П1 | |||
| ... | ||||
| Призма П2 | ||||
| ... | ||||
| 
|
Параметри розрахунків:
(м) =....; (м) =....; (м) =....;
 (м) =....;
(м) =....;  (с) =....;
(с) =....;  =....;
=....;
Визначенні похибок:


Остаточний результат:



|
|
|
|
|
Дата добавления: 2015-05-23; Просмотров: 2901; Нарушение авторских прав?; Мы поможем в написании вашей работы!