КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Следящий гидропривод
|
|
|
|
Параллельное соединение.
Такое соединение показано на рис. 6.4, а. Трубопроводы 1, 2 и 3 расположены горизонтально.
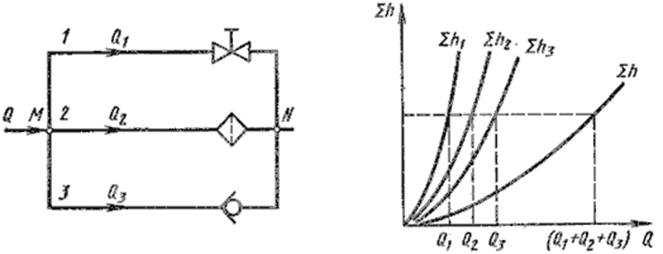
Рис. 6.4. Параллельное соединение трубопроводов
Обозначим полные напоры в точках М и N соответственно HM и HN, расход в основной магистрали (т.е. до разветвления и после слияния) – через Q, а в параллельных трубопроводах через Q1, Q2 и Q3; суммарные потери в этих трубопроводах через Σ1, Σ2 и Σ3.
Очевидно, что расход жидкости в основной магистрали
Q = Q1 = Q2 = Q3
Выразим потери напора в каждом из трубопроводов через полные напоры в точках М и N:
Σ h 1 = HM - HN; Σ h 2 = HM - HN; Σ h 3 = HM - HN
Отсюда делаем вывод, что
Σ h1 = Σ h2 = Σ h3
т.е. потери напора в параллельных трубопроводах равны между собой. Их можно выразить в общем виде через соответствующие расходы следующим образом
Σ h 1 = K 1 Q 1m; Σ h 2 = K 2 Q 2m; Σ h 3 = K 3 Q 3m
где K и m - определяются в зависимости от режима течения.
Из двух последних уравнений вытекает следующее правило: для построения характеристики параллельного соединения нескольких трубопроводов следует сложить абсциссы (расходы) характеристик этих трубопроводов при одинак. ординатах (Σ h).
 Следящим называется регулируемый гидропривод, в котором скорость движения выходного звена изменяется по определенному закону в зависимости от задающего воздействия на звено управления. Выходное звено – это обычно шток гидро-цилиндра или вал гидро-мотора, а звено управления – устройство, на которое подается управляющий сиг-нал.Следящий гидропривод применяют в тех случаях, когда непосредственное ручное управление той или иной машиной является для человека. Управление смещением золотника и его обратная связь с люлькой могут быть электрическими. В этом случае работа насоса может регулироваться дистанционно и автоматически, например, по командам ЭВМ. Гидроприводы, в которых входным воздействием является электрический сигнал, преобразуемый в перемещение гидрораспределителя, называют электрогидравлическими. В них выходное звено отслеживает изменение электрического сигнала, поступающего на звено управления. Рассмотрим простейшие системы для преобразования электрического сигнала в гидравлический. Гидроусилитель типа сопло—заслонка показан схематически на рис. 3.113 состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установленных на пути подвода жидкости из точки 6, куда она подается от насоса. Исполнительным механизмом гидроусилителя служит гидроцилиндр 9. Первый каскад управляет смещением золотника 8, который является вторым каскадом гидроусилителя и непосредственно управляет гидроцилиндром. Вся система нужна для того, чтобы на входе мог быть использован маломощный электрический командный сигнал от задающей электронной аппаратуры. Этот сигнал подается на обмотки миниатюрного электромеханического преобразователя 3 (поворотного электродвигателя) в виде разности напряжений U1 и U2 в результате чего происходит отклонение заслонки 2. До ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы QA и qб После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений рд и рв в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 и 11, что в конечном итоге приводит в действие гидроцилиндр. Если в такой системе на выходе исполнительного механизма, предусмотрен датчик обратной связи 10, сигнализирующий об исполнении поданной команды напряжением Uoc, ослабляющим сигнал на входе, то она будет представлять электрогидравлическую следящую систему. Главным преимуществом такого гидроусилителя является применение простейших квадратичных дросселей, не чувствительных к засорениям и к изменению вязкости жидкости. Такие дроссели, имея нелинейные характеристики, позволяют при взаимодействии получить характеристики со взаимосвязью входных и выходных параметров близкой к линейной.
Следящим называется регулируемый гидропривод, в котором скорость движения выходного звена изменяется по определенному закону в зависимости от задающего воздействия на звено управления. Выходное звено – это обычно шток гидро-цилиндра или вал гидро-мотора, а звено управления – устройство, на которое подается управляющий сиг-нал.Следящий гидропривод применяют в тех случаях, когда непосредственное ручное управление той или иной машиной является для человека. Управление смещением золотника и его обратная связь с люлькой могут быть электрическими. В этом случае работа насоса может регулироваться дистанционно и автоматически, например, по командам ЭВМ. Гидроприводы, в которых входным воздействием является электрический сигнал, преобразуемый в перемещение гидрораспределителя, называют электрогидравлическими. В них выходное звено отслеживает изменение электрического сигнала, поступающего на звено управления. Рассмотрим простейшие системы для преобразования электрического сигнала в гидравлический. Гидроусилитель типа сопло—заслонка показан схематически на рис. 3.113 состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установленных на пути подвода жидкости из точки 6, куда она подается от насоса. Исполнительным механизмом гидроусилителя служит гидроцилиндр 9. Первый каскад управляет смещением золотника 8, который является вторым каскадом гидроусилителя и непосредственно управляет гидроцилиндром. Вся система нужна для того, чтобы на входе мог быть использован маломощный электрический командный сигнал от задающей электронной аппаратуры. Этот сигнал подается на обмотки миниатюрного электромеханического преобразователя 3 (поворотного электродвигателя) в виде разности напряжений U1 и U2 в результате чего происходит отклонение заслонки 2. До ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы QA и qб После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений рд и рв в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 и 11, что в конечном итоге приводит в действие гидроцилиндр. Если в такой системе на выходе исполнительного механизма, предусмотрен датчик обратной связи 10, сигнализирующий об исполнении поданной команды напряжением Uoc, ослабляющим сигнал на входе, то она будет представлять электрогидравлическую следящую систему. Главным преимуществом такого гидроусилителя является применение простейших квадратичных дросселей, не чувствительных к засорениям и к изменению вязкости жидкости. Такие дроссели, имея нелинейные характеристики, позволяют при взаимодействии получить характеристики со взаимосвязью входных и выходных параметров близкой к линейной.
|
|
|
|
|
|
|
|
|
|
|
Дата добавления: 2015-05-23; Просмотров: 406; Нарушение авторских прав?; Мы поможем в написании вашей работы!