КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дулем, протилежні за напрямом і діють вздовж прямої, що з'єднує ці 2 страница
|
|
|
|

Вектор середньої швидкості < V > за проміжок часу Δt - це фізична
величина, що дорівнює відношенню вектора переміщення точки Δг до
тривалості проміжку часу Δt:
У процесі руху може змінитися не тільки модуль швидкості, а й напрям
Руху, тобто напрям швидкості. Для характеристики зміни швидкості в
часі вводять ще одну характеристику руху - прискорення.
Прискорення (а) - векторна величина, що характеризує зміну швидко-
і ті руху матеріальної точки за модулем і напрямом.
Прискорення а - векторно величина, що дорівнює першій похідній за
часом від швидкості розглядуваної матеріальної точки:
Тема1. 2. Тангенціальне (дотичне) й нормальне прискорення. Найпростіші випадки кінематики матеріальної точки й поступального руху твердого тіла: прямолінійний рух (рівномірне й рівноприскорене); рух точки по колу. інтеграл у додатку до фізичних завдань. Модель абсолютно твердого тіла. Обертовий рух абсолютно твердого тіла. Вектор кутового переміщення й вектор кутової швидкості. Зв'язок між кутовий й лінійної швидкостями точок обертового твердого тіла. Векторний добуток (векторів). Кутове прискорення. Найпростіші випадки кінематики обертового руху.
Прискорення а - векторно величина, що дорівнює першій похідній за
часом від швидкості розглядуваної матеріальної точки:
Прискорення а має дві взаємно перпендикулярні складові: аτ - танген-
ціальне або дотичне прискорення, аn - нормальне або доцентрове при-
скорення.
Тангенціальне прискорення аτ напрямлене вздовж дотичної до траєк-
торії руху, визначає швидкість змінення модуля швидкості, Модуль
тангенціального прискорення дорівнює похідній за часом від модуля
швидкості:
|
|
|
Нормальне прискорення аn характеризує змінення швидкості за на-
прямом і напрямлене за нормаллю до траєкторії до центру її кривини.
Модуль нормального прискорення залежить від швидкості точки і ра-
діуса К кривини траєкторії:
Тангенціальне і нормальне прискорення
У загальному випадку під час криволінійного руху вектор
прискорення а напрямлений всередину траєкторії під деяким кутом від-
носно неї. Розкладемо за правилом паралелограма вектор а на
дві складові. Одна складова (аτ) буде напрямлена вздовж дотичної до
траєкторії руху матеріальної точки, а інша (аn) - вздовж нормалі до траєк-
торії, тобто перпендикулярно до дотичної в даній точці траєкторії.
Складова аn вектора прискорення а, напрямлена вздовж нормалі до
траєкторії в даній точці, називається нормальним прискоренням. Нор-
зує зміну вектора швидкості за модулем.
При прямолінійному русі швидкість тіла змінюється тільки за модулем, тобто аn = 0, тому а = аτ. Визначимо напрям прискорення стартую-
чого гоночного автомобіля на прямолінійній ділянці траєкторії
аτ. аτ.
v0 v0
Швидкість v більша за v0, тобто автомобіль рухається прискорено. Тому
вектор зміни швидкості Δv = v - v0 напрямлений вздовж напряму руху,
отже, і вектор прискорення а = аτ напрямлений вздовж напряму руху
(напряму швидкості). Вектори швидкості й прискорення - колінеарні У разі
прямолінійного прискореного руху вектор швидкості V і вектор приско-
рення а мають однаковий напрям (рівнонапрямлені вектори).
Нормальне прискорення характеризує зміну вектора швидкості за напрямом у разі криволінійного руху. Складова аτ вектора прискорення а,
напрямлена вздовж дотичної до траєк- торії в даній точці, називається тангенціальним або дотичним прискоренням.
Тангенціальне прискорення характери- зує зміну вектора швидкості за модулем.При прямолінійному русі швидкість тіла змінюється тільки за моду-
|
|
|
лем, тобто ая = 0, тому а = а х. Визначимо напрям прискорення стартую-
чого гоночного автомобіля на прямолінійній ділянці траєкторії (рис. 1.23).
Швидкість у більша за у0, тобто автомобіль рухається прискорено. Тому
вектор зміни швидкості Ду = у - у0 напрямлений вздовж напряму руху,
отже, і вектор прискорення а = ат напрямлений вздовж напряму руху
(напряму швидкості)*.
Визначимо напрям прискорення автомобіля під час гальмування на
прямолінійній ділянці шляху (рис. 1.24). Швидкість у менша за у0,
тобто автомобіль рухається сповільнено, тому вектор зміни швидкості
ДУ = У-У0 напрямлений протилежно напряму руху, отже і вектор при-
скорення а - а т напрямлений протилежно напряму руху (напряму швид-
кості).
Таким чином, вектори швидкості й прискорення - колінеарні У разі
прямолінійного прискореного руху вектор швидкості V і вектор приско-
рення а мають однаковий напрям (рівнонапрямлені вектори).
Способи задання руху твердого тіла залежать від форми його руху. Найпростішими є поступальний і обертальний рухи твердого тіла.
Поступальний - це такий рух твердого тіла, коли пряма, що з'єднує
дві будь-які точки тіла, переміщується, залишаючись паралельною своє-
му початковому положенню (рис. 1.5).
У разі поступального руху твердого тіла всі точки тіла описують одна-
кові траєкторії. Його рух задається й вивчається так само, як і рух однієї
ТОЧКИ. Поступально рухаються ящики письмового стола, вагони метро -
слектропотяги, кабіни "колеса огляду".
Обертальний рух навколо нерухомої осі - це такий рух твердого тіла,
коли всі його точки описують кола, центри яких лежать на одній прямій -
осі обертання, що перпендикулярна до площин цих кіл.
Закон рівномірного прямолінійного руху
У разі прямолінійного руху траєкторією руху є пряма лінія.
Рівномірний прямолінійний рух- такий рух, коли тіло рухається вздовж однієї зосей координат.
Якщо рух прямолінійний, то модуль вектора переміщення дорівнює
шляху.
Вектор швидкості тіла, що рухається прямолінійно, не змінюється за
напрямом, а модуль вектора швидкості з плином часу може як змінюва-
ти, так і лишатися сталим. Якщо модуль швидкості тіла в часі зміню-
нерівномірним або змінним.
Рівномірний - це рух, коли тіло переміщується зі сталою за модулем
|
|
|
швидкістю V = сопst.
х=х0+vt
()диниця швидкості - метр на секунду (м/с).
Рівноприскорений прямолінійний рух
Рівнозмінний рух - це рух, коли прискорення лишається сталим і за
модулем, і за напрямом:
а = сопst.
У разі рівнозмінного руху середнє прискорення < а > дорівнює миттєвому прискоренню а, тобто <а>=а. Напрямлено прискорення а вздовж
траєкторії руху матеріальної точки. Нормальне прискорення дорівнює
нулю: аn=0. Рівнозмінний рух може бути або рівноприскореним, або
рінносповільненим.
Рівноприскорений прямолінійний рух - це рух, коли прискорення є ста-
лим за модулем і напрямом, а вектори швидкості та прискорення є рів-
нонапрямленими:
а = сопst.
Одиниця прискорення - метр за секунду в квадраті (м/с2).
Метр за секунду в квадраті дорівнює прискоренню тіла, що рухається
прямолінійно і прискорено, коли за час 1 с швидкість точки змінюється
на 1м/с.
v=v0+ а t х=х0+ v0t+ 0,5а t 2
У разі рівноприскореного прямолінійного руху залежність швидкості
руху матеріальної точки від часу є лінійною.
Швидкість тіла, що рухається рівноприскорено прямолінійно, зростає
в часі.
Рух колом як періодичний рух
Рух колом є найпростішим прикладом періодичного руху.
Періодичний рух - це рух, який повторюється через певний проміжок
часу. Наприклад, обертання Землі навколо власної осі, обертання Землі
навколо Сонця. Характеристикою періодичного руху є період.
Період Т - мінімальний проміжок часу\ через який рух повторюється,
тобто час одного оберту.
Одиниця періоду - секунда (с).
Знаючи період обертання, можна визначити частоту обертання.
Частота обертання ν - величина, що показує число обертів в одини-
цю часу:
ν=N/t
Одиниця частоти - секунда в мінус першому степені (с-1).
Одна с-1 дорівнює частоті рівномірного обертання, з якою за час 1 с
тїло здійснює один повний оберт.
Період обертання Землі навколо власної осі - одна доба, тобто 24 години;
Т = 1 доба = 8,64 • 1О4 с
Швидкість руху тіла колом називають лінійною швидкістю.
Радіус кола, яким рухається тіло, є величиною сталою: t = сопзі. Про-
|
|
|
ведемо координатну вісь Xчерез центр кола О. Центр кола О -
початок координат. Положення точки А на колі в будь-який момент часу
точно визначається кутом φ між додатним напрямом осі X і радіусом-
вектором г, проведеним з початку координат до рухомої точки. Кут φ від-
лічується від додатного напряму осі Хдо радіуса-вектора г проти годиннико-
вої стрілки. Кути виражають у радіанах. Кут 360° відповідає 2π радіан.
Лінійний шлях Δs дорівнює добутку модуля радіуса-вектора | г і точки
на його кут повороту.
Рівномірний рух колом — це такий рух, коли точка рухається
із сталою за модулем лінійною швидкістю:
Рівномірний рух
У разі рівномірного руху колом за однакові проміжки часу:
• точка проходить однакові за довжиною дуги кола;
• радіус-вектор точки повертає на однакові кути.
Напрям і швидкість повороту радіуса-вектора рухомої колом точки
характеризує кутова швидкість.
Кутова швидкість ω- векторна величина, що дорівнює відношенню
повороту радіуса-вектора Δφ до проміжку часу Δt, за який цей
поворот відбувся.
()диниця кутової швидкості - радіан на секунду (рад/с).
Радіан на секунду дорівнює кутовій швидкості рівномірно обертової
і очки, радіус-вектор якої за час 1 с повертається на кут 1 рад.
Модуль кутової швидкості можна виразити через період обертання Т.
Миттєва кутова швидкість ω - фізична величина, модуль якої дорів-
нює границі, до якої прямує модуль середньої кутової швидкості при на-
шиженні проміжку часу до нуля.
Миттєву кутову швидкість називають просто кутовою швидкістю.
Модуль кутової швидкості дорівнює похідній від кута повороту радіуса-
ш'ктора обертової точки за часом.
Між модулем ЛІНІЙНОЇ ШВИДКОСТІ V точки, що обертається колом, і мо-
дулем ЇЇ кутової швидкості о) існує зв'язок.

Модуль лінійної швидкості точки, що рухається колом, дорівнює добутку модуля кутової швидкості на радіус кола. З формули випли-
нає, що чим більшим є радіус кола, тим більша лінійна швидкість. Лінійна
швидкість обертання Землі навколо власної осі є максимальною в точках
екватора, а мінімальною (нульовою) - на полюсах.
Доцентрове прискорення
У разі рівномірного обертання модуль лінійної швидкості -
стала величина, отже, тангенціальне або дотичне прискорення дорів-
нює нулю: аτ =0. Змінення вектора швидкості V за напрямом характери-
зує нормальне або доцентрове прискорення.

Миттєва кутова швидкість со - фізична величина, модуль якої дорів-
нює границі, до якої прямує модуль середньої кутової швидкості при на-
шиженні проміжку часу до нуля:
Миттєву кутову швидкість називають просто кутовою швидкістю.
Модуль кутової швидкості дорівнює похідній від кута повороту радіуса-
ш'ктора обертової точки за часом.
Кутове прискорення
Кутове прискорення (ε) - векторна величина, що характеризує швидкість змінення кутової швидкості.
У разі рівномірного обертання ω = соnst, тобто кутова швидкість не
змінюється, тому ε = 0.
У разі нерівномірного обертального руху матеріальної точки кутова
швидкість її ω у часі змінюється.
Середнє кутове прискорення <ε> - фізична величина, яка дорівнює
відношенню зміни кутової швидкості до тривалості проміжку часу, протягом якого ця зміна відбулася.
Миттєве кутове прискорення ε - фізична величина, що дорівнює гра-
ниці, до якої прямує середнє кутове прискорення < ε > при наближенні
проміжку часу Δt до нуля.
Кутове прискорення ε- векторна величина, яка дорівнює першій похідній кутової швидкості за часом. Отже, кутове прискорення -- це швидкість
змінення кутової швидкості.
Якщо в обертальному русі тіла ε= соnst, то такий рух називають рів-
нозмінним обертанням..
Якщо ε>0, кутова швидкість зростає - рух рівноприскорений (рис. а).
Якщо ε< 0, кутова швидкість зменшується - рух рівносповільнений (рис. б).
Коли тіло обертається навколо нерухомої точки, напрям вектора со
збірігається. Вектор ε збігається за напрямом з вектором со у разі приско-
реного обертання (ε > 0) і протилежний йому за напрямом у разі сповіль-
неного обертання (ε< 0) (див. рис. а, б).
Одиниця кутового прискорення - радіан на секунду в квадраті (рад/с2).
Радіан на секунду в квадраті дорівнює кутовому прискоренню рівно-
прискорено обертової матеріальної точки, при якому за час 1 с кутова
швидкість точки змінюється на 1 рад/с.
Із зміною кутової швидкості змінюється і її лінійна швидкість. Зміна
лінійної швидкості за напрямом характеризує нормальне прискорення,
яке залежить від кутової швидкості і не залежить від кутового прискорення.
Зміна величини лінійної швидкості характеризує тангенціальне прискорення.
При рівноприскореному обертанні кутова швидкість у довільний момент часу визначається за формулою
Змістовий модуль 2
Динаміка - розділ механіки, присвячений вивченню руху матеріальних тіл під дією прикладених до них сил.
У динаміці розглядаються два типи задач.
• Задачі першого типу полягають у тому, щоб, знаючи закони руху і, визначити діючі, на нього сили. Класичним прикладом розв'язання такої задачі стало відкриття Ньютоном закону Всесвітнього тяготіння.
• Задачі другого типу в динаміці є основними і полягають в тому,
щоб, знаючи початкове положення і початкову швидкість тіла, за діючи-
ми на тіло силами визначити закон його руху.
Перший закон Ньютона - закон інерції.
Спостереження за рухом тіл і розмірковування про характер цих рухів дозволили І. Ньютону сформулювати знамениті закони руху, які він виклав у праці "Математичні початки натуральної філософії" (книжку було видано в 1687 р.).
В основі праці "Математичні початки", як і в праці Евкліда "Початки",
лежать декілька аксіом, що не потребують доведення, - законів (основних
положень), які являють собою узагальнення багатовікового досвіду, підсумки всьому зробленому за попередні тисячоліття в ученні про найпростіші форми руху матерії.
Перший закон Ньютона говорить:
будь-яка матеріальна точка (тіло) зберігає стан спокою або рівномір-
ного прямолінійного руху до того часу, поки зовнішні діяння з боку інших
тіл не змінять цього стану.
Перший закон Ньютона виконується в системах відліку, котрі називаються "інерціальні", і встановлює факт існування інерціальних систем відліку.
Інерціальні - це системи відліку, в яких вільне тіло рухається прямолінійно і рівномірно.
Для опису механічних рухів на Землі інерціальну систему відліку
зв'язують із Землею (геоцентрична система відліку).
Питання про те, чи є вибрана система відліку інерціальною, вирішу-
ється експериментально. Якщо в межах точності вимірювань у даній сис-
темі відліку перший закон Ньютона виконується, то вона може вважатися
інерціальною.
Рівномірний і прямолінійний рух вільного тіла в інерціальній системі
відліку називають рухом за інерцією. Рухаючись за інерцією, вільне тіло
не змінює швидкість ні за модулем, ні за напрямом.
Маса - міра інертності
Всі тіла володіють інертністю.
Інертність - це властивість тіла зберігати стан спокою або стан
прямолінійного рівномірного руху, коли діючі на нього сили відсутні або
взаємно зрівноважені.
Внаслідок інертності тіла зберігають свою швидкість за відсутності
взаємодії з іншими тілами.
Припустимо, на колії стоять два однакових вагони. Один із них порожній, інший - навантажений. Який з вагонів "легше" вивести зі стану
спокою, тобто змінити його швидкість? Зрозуміло, порожній.
Порожній і навантажений вагони рухаються з однаковою швидкістю. Який
з цих вагонів "важче" зупинити, тобто змінити його швидкість? Зрозуміло,
навантажений. Отже, інертність навантаженого вагона більша за інертність
порожнього, тому що маса навантаженого вагона більша за масу порожнього.
Маса - це фізична величина, яка є мірою інертності тіла при його
поступальному русі.
Маса - величина скалярна. Одиниця маси - кілограм (кг).
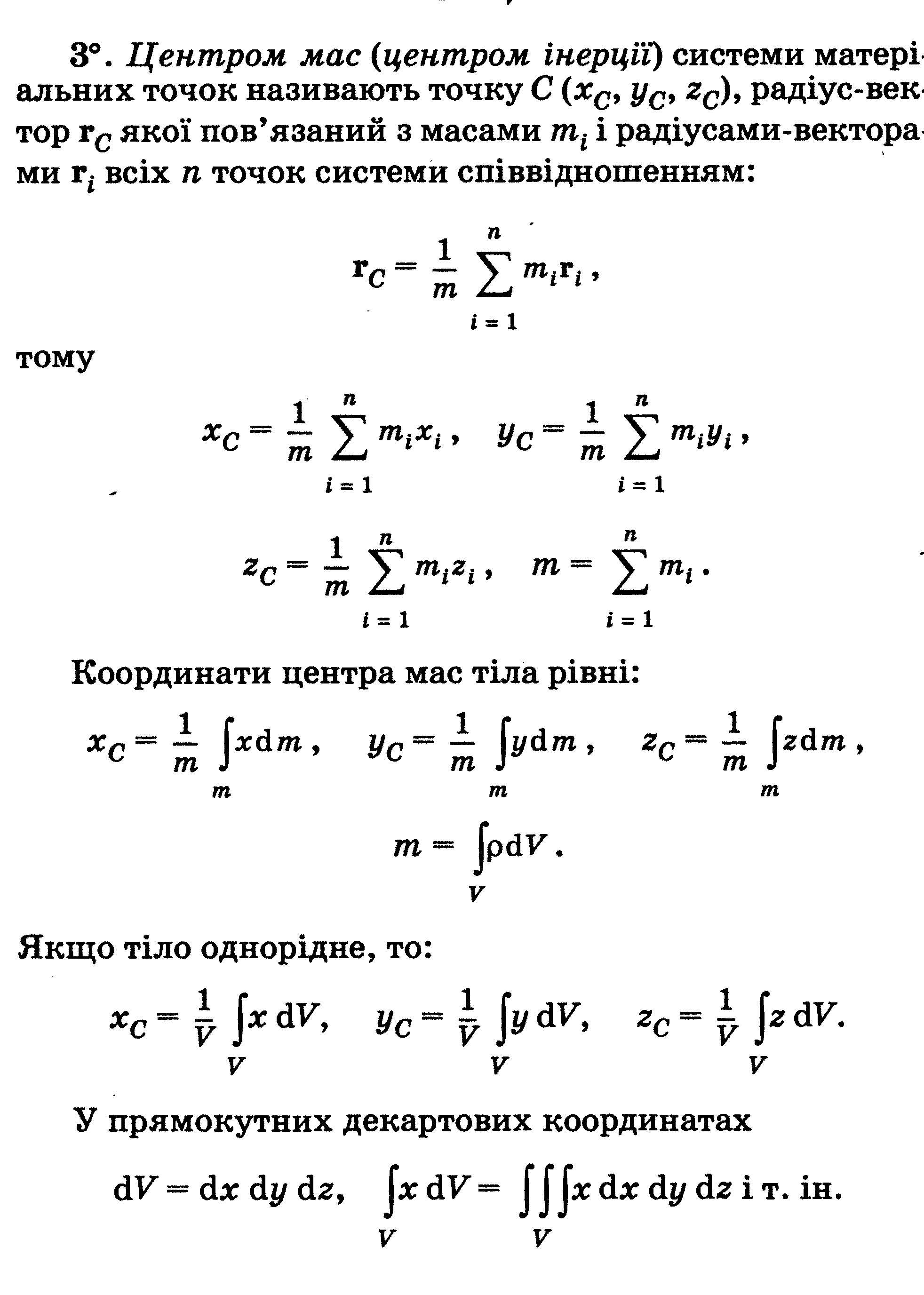
Центр мас
Для поступального руху тіла зручно ввести таке поняття, як
центр мас або центр інерції.
Центр мас - це точка, в якій може вважатися зосередженою маса
тіла при його поступальному русі.
Точки тіла, що рухається поступально, мають однакову швидкість і
описують паралельні одна одній траєкторії. Тому можна розглядати по-
ступальний рух не всього тіла, а однієї точки - його центра мас, тобто
матеріальної точки, в якій наче зосереджена вся маса тіла.
Очевидно, що центр мас однорідних симетричних тіл збігається з
центром симетрії О (рис. а). Центр мас однорідної кулі збігається з її
центром. Центр мас однорідного стрижня знаходиться в його середині.
а
Центр мас тіла може знаходитися й поза тілом (наприклад, центр мас
однорідного обода чи кільця, рис. б).
Другий закон Ньютона говорить: прискорення тіла в інєрціальній системі відліку прямо пропорційне діючій на тіло силі та обернено пропорційне масі тіла: 

Якщо на тіло діє кілька сил, то за формулою закона Ньютона під
силою Р слід розуміти рівнодійну всіх цих сил. Такий висновок випливає
і принципу незалежності дії сил.
В окремому випадку, коли всі сили, що діють на тіло, напрямлені
вздовж однієї прямої, їх рівнодійна, а отже, й прискорення напрямлені
вздовж тієї ж самої прямої, і тому рівняння основного закону механіки
можна записати в скалярній формі:
Р = та,
де рівнодійна сила Р є алгебричною сумою всіх сил, які діють на тіло. Якщо рівнодійна всіх сил, діючих на тіло, дорівнює нулю (Р = 0), то
прискорення тіла дорівнює нулю (а = 0), тобто швидкість руху тіла є ста-
лою: V = сопst - рух прямолінійний і рівномірний.
Поняття "сила" завжди стосується двох тіл, Сила виникає,
коли взаємодіють два тіла. В процесі взаємодії матеріальні точки або тіла
є рівноправними. На рівність сил при взаємодії тіл указував ще голландський фізик X. Гюйгенс. Цього висновку він дійшов, вивчаючи зіткнення тіл.
Рівноправність взаємодіючих матеріальних точок або тіл відбиває тре-
тій закон Ньютона.
Ньютон сформулював цей закон так: "Будь-якій дії завжди перешко-
джає рівна і протилежна протидія" (рис.). В наш час третій закон
Ньютона гласить:
сили взаємодії двох тіл в інерціальиій системі відліку рівні за мо-
тіла:
Р12=-Р21.
Застосування третього закону Ньютона
Розглянемо взаємодію двох тіл (А і В), Наприклад, людинаюячи в човні, підтягає інший човен за допомогою мотузки (рис) її ідно з третім законом Ньютона
Імпульс тіла р - векторна величина, яка дорівнює добуткові маси тіла
на швидкість його руху
р = т v.
Напрям вектора р завжди збігається з напрямом вектора V.
Одиниця імпульсу - кілограм-метр на секунду (кг • м/с).
Тема 2.3 Робота сили. Робота змінної сили. Потужність. Скалярний добуток векторів. Кінетична енергія матеріальної точки й механічної системи. Потенціальне поля. Консервативні й неконсервативні сили. Циркуляція вектора сили. Поняття про градієнт скалярної функції координат. Зв'язок між консервативною силою й потенційної енергією. Закон збереження моменту імпульсу щодо точки. Кінетична енергія обертового твердого тіла. Робота зовнішніх сил при обертовому русі. Закон збереження повної механічної енергії.
|
|
|
|
|
Дата добавления: 2015-05-24; Просмотров: 2623; Нарушение авторских прав?; Мы поможем в написании вашей работы!