КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электродвигатели механизмов собственных нужд - Электрическая часть электростанций
Подавляющее большинство механизмов собственных нужд электрических станций имеет электрический привод. Выбор рода тока и исполнение электродвигателей определяется их назначением, ответственностью механизма и местом его установки. С увеличением мощности электрических станций и единичной мощности электродвигателей собственных нужд очень важную роль начинают играть их пусковые характеристики и способность сохранять устойчивость работы в аварийных режимах электрической системы. Исходя из этого преимущественное распространение для привода механизмов собственных нужд получили асинхронные электродвигатели с короткозамкнутым ротором. Эти двигатели конструктивно просты, надежны в эксплуатации, имеют сравнительно высокий к. п. д. и cos ф, а их пусковые характеристики могут быть согласованы с характеристиками рабочих машин с помощью глубокопазных двигателей за счет использования двух обмоток на роторе.
Большим преимуществом асинхронных двигателей с короткозамкнутым ротором является возможность их пуска от полного напряжения сети без специальных пусковых устройств и способность группы электродвигателей восстанавливать нормальный режим работы после глубоких понижений питающего напряжения (самозапуск).
Свойства асинхронных электродвигателей определяются их механическими характеристиками Меаъ — / (s) (рис. 3-7, а), зависимостями тока статора (кратности пускового тока Лпуск) от относительной частоты вращения (скольжения) (рис. 3-7, б), а также такими параметрами, как кратность максимального момента bn = Ме кратность пускового момента bпуск = = Ме а7СК/Мва, критическое скольжение sKp. Глубокопазные и в особенности двухклеточные двигатели обладают лучшими пусковыми характеристиками по сравнению с двигателями обычного исполнения, подороже последних и из-за большей сложности конструкции менее надежны.
При выборе мощности и типа электродвигателя соблюдаются определенные условия. Номинальная мощность электродвигателя РдВ. и должна быть больше расчетной мощности на валу механизма Ррасч; номинальные частоты вращения двигателя и механизма должны быть согласованы (с установкой в случае необходимости редуктора); развиваемый электродвигателем момент должен обеспечивать повышение частоты вращения механизма до номинальной при допустимом перегреве обмоток.
Возможность успешного пуска определяется совмещением на одном графике характеристик двигателя (рис. 3-7, а) и механизма (см. рис. 3-3). Необходимо, чтобы при п = 0 выполнялось условие /Иедв > /Иторм. Установившаяся частота вращения определяется точкой пересечения характеристик. Разность развиваемого двигателем момента и момента сопротивления механизма определяет динамический (избыточный) момент, от которого зависит время повышения частоты вращения двигателя до номинальной:

(3-10)
где TJm — механическая постоянная времени агрегата; Anlt...., Апп — приращение частоты вращения, в пределах которого средний динамический момент можно считать постоянным.
Формула (3-10) является приближенным выражением зависимости
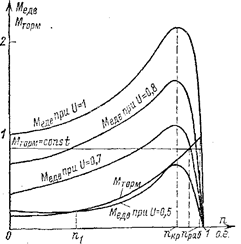
Рис. 3-8. Условия работы асинхронного двигателя при приводе механизмов с постоянным и вентиляторным моментом сопротивления в зависимости от питающего напряжения
Так как в процессе пуска электродвигатель потребляет ток, значительно превышающий номинальный ток (рис. 3-7, б), то при тяжелых условиях пуска (большие маховые моменты агрегата, малые избыточные моменты) время переходного процесса возрастает, что может явиться причиной недопустимого нагрева обмоток. На электростанциях наиболее тяжелые условия пуска имеют место для механизмов с постоянным моментом сопротивления (мельницы, дробилки, транспортеры, подъемно-транспортное оборудование) и для некоторых механизмов с вентиляторным моментом, но с большой маховой массой (тягодутьевые механизмы, резервный возбудитель, главные циркуляционные насосы АЭС). При выборе электродвигателей для этих механизмов дополнительно к условию р№. и > Ррасч Проверяют их на нагрев при пуске и в необходимых случаях устанавливают двигатели увеличенной мощности.
Так как электромагнитный момент асинхронного двигателя пропорционален квадрату питающего напряжения (рис. 3-8), то с уменьшением последнего точка пересечения механических характеристик смещается в сторону меньших частот вращения
и при некотором напряжении развиваемый двигателем момент станет меньше момента сопротивления. В случае постоянства момента сопротивления двигатель при этом затормаживается. Напряжение, при котором максимальный момент двигателя становится равным моменту сопротивления механизма при номинальной частоте вращения, называется критическим. Для механизма с моментом сопротивления, зависящим от частоты вращения, при U <
UKp точка пересечения механических характеристик двигателя и механизма оказывается лежащей слева от максимального момента двигателя, т. е. на неустойчивой части характеристики. Увеличение нагрузки или дальнейшее снижение напряжения может привести к его затормаживанию. При U > UKp точка пересечения характеристики даже при Мторм = const лежит справа от максимального момента и двигатель продолжает работать устойчиво. Отсюда следует, что двигатели с большей кратностью максимального момента фп) сохраняют устойчивость при больших понижениях напряжения.
Из рис. 3-8 видно, что при постоянном моменте сопротивления двигатель не может тронуться с места даже при сравнительно небольшом понижении питающего напряжения и для успешного пуска необходимо устанавливать электродвигатели с возможно большей кратностью пускового момента (bпуок) или даже увеличивать номинальную мощность по сравнению с расчетной на валу механизма.
Электродвигатели механизмов с моментом сопротивления, зависящим от частоты вращения, успешно запускаются и при больших понижениях напряжения, но следует считаться с возможностью их неполного разворота при работе на неустойчивой части характеристики (на рис. 3-8 — с частотой вращения пг при U = = 0,5). Работа с пониженной частотой вращения на неустойчивой ветви характеристики будет продолжаться до тех пор, пока напряжение не станет выше критического, при условии, конечно, что двигатель не будет отключен защитой от перегрузки.
Отсюда следует, что для привода механизмов собственных нужд нужно по возможности стремиться применять двигатели с одной короткозамкнутой обмоткой на роторе и лишь при особо тяжелых условиях пуска — с двумя беличьими клетками.
При выборе электродвигателей следует учитывать условия внешней среды в месте их установки. В сухих помещениях применяют электродвигатели открытого исполнения, т. е. с открытыми торцевыми подшипниковыми щитами, через которые поступает воздух для охлаждения машины.
На электрических станциях большей частью приходится устанавливать электродвигатели закрытого исполнения, которые защищены от проникновения в них капель и брызг воды и имеют влагозащищенную изоляцию обмоток.
Для механизмов на открытых площадках (например, открытые дымососные отделения) выбирают закрытые двигатели наружной установки. Особенно важно применение закрытых пылезащищенных двигателей на топливоподачах мощных ТЭС, на которых транспортирование большого количества угля при высоких скоростях ленты и больших перепадах высот в узлах пересыпки сопровождается образованием угольной пыли по всему тракту. Хотя для борьбы с пылью предусматриваются аспирационные установки, пылеподавление и гидросмыв, все же полностью устранить пиление не удается.
Во взрывоопасных помещениях (мазутные насосные, пылезаводы) применяют специальные типы закрытых электродвигателей.
Напряжение асинхронных электродвигателей выбирают в зависимости от их единичной мощности и номинального напряжения системы собственных нужд. Обычно на станциях имеются два напряжения собственных нужд: высшее (6 или 3 кВ) и низшее (0,4/0,22 кВ) ори заземленной нейтрали трансформаторов. В отдельных случаях для питания отдельных автономных потребителей используют напряжение 0,66/0,38 кВ.
На ТЭС, ТЭЦ и АЭС высшее напряжение собственных нужд, как правило, принимается равным 6 кВ. Напряжение 3 кВ допускается на расширяемых электростанциях, уже имеющих это напряжение, а также на электростанциях средней мощности с генераторами напряжением 10 кВ.
На ТЭС с мощными агрегатами и крупными механизмами собственных нужд может быть экономически оправдано напряжение 10 кВ. Препятствием к применению этой ступени напряжения может быть высокая стоимость электродвигателей 10 кВ и нежелательность в системе питания собственных нужд третьего напряжения (0,66 или 3 кВ).
Следует учитывать, однако, что электродвигатели собственных нужд совершенствуются. Все шире применяется для высоковольтных обмоток термореактивная изоляция, что улучшает параметры двигателей и повышает их надежность. Термореактивная изоляция в перспективе облегчит переход с напряжения собственных нужд 6 кВ на напряжение 10 кВ.
При выборе двигателей должны учитываться изменения в конструкции приводимых механизмов. Например, для новых конструкций вертикальных циркуляционных насосов ТЭС следует использовать специально для них разработанные вертикальные асинхронные двигатели с короткозамкнутым ротором единичной мощностью 2000—5000 кВт и с частотой вращения 250 и 300 об/мик. Специальные вертикальные двигатели большой мощности используются также для привода главных циркуляционных насосов АЭС.
Новые типы углеразмольных мельниц и мельничных вентиляторов также требуют специально для них разработанных электродвигателей.
Выбор типа электродвигателя связан также со способом регулирования производительности механизмов собственных нужд Например, на пылеугольных ТЭС для питателей пыли применяются электродвигатели постоянного тока. На более старых ТЭС питание электродвигателей производится от двигатель-генераторов, а регулирование частоты их вращения — изменением тока возбуждения двигателей. Электродвигатели постоянного тока имеют ряд недостатков, главным из которых является трудность поддержания постоянства частоты вращения всех питателей пыли. Скоростные характеристики двигателей постоянного тока изменяются от срабатывания ресурса, при смене щеток, при нагреве электродвигателей и регулирующей аппаратуры, при ухудшении неподвижных и скользящих контактов, повреждении и скрутках проволоки регулирующих реостатов, под влиянием магнитного гистерезиса, изменений зазоров полюсов и т. п. При наладке удается получить расхождение частот вращения двигателей во всем диапазоне регулирования, равное 4—5 %, но уже через два-три месяца оно доходит до 15—20 %, а затем до 50—70 % и более.
Расхождение частот вращения питателей пыли приводит к ухудшению процесса горения в топке котла, снижению к. п. д. котла, а иногда и к аварийным последствиям (шлакованию или пережогу трубных поверхностей' нагрева котла).
Рекомендуется использовать для привода питателей пыли короткозамкнутые асинхронные двигатели с частотным регулированием скорости, которая на отдельных пылепитателях при одинаковой их частоте будет отличаться только за счет индивидуальных отклонений скольжения, что не превышает в рабочем диапазоне частот 1—2 %. При этом способе можно отказаться от разделения электропривода на несколько частей и питать все двигатели от одного тиристорного преобразователя частоты, т. е. значительно упростить всю схему питания.
Привод дымососов и вентиляторов центробежного типа осуществляется обычно двухскоростными асинхронными двигателями. Двухскоростные двигатели требуют установки на каждый агрегат двух выключателей и прокладки двух питающих кабелей. Регулирование при этом получается ступенчатым, и для достижения нужной производительности в интервале между ступенями приходится применять дополнительные средства, например направляющие аппараты. Для привода тягодутьевых машин осевого типа применяют односкоростные двигатели, а производительность изменяют изменением поворота лопастей рабочего колеса или направляющего аппарата. Следует учитывать, однако, что направляющие аппараты имеют весьма низкий к. п. д., снижающийся при глубоком регулировании до 45—50 %. Применение двухскоростных двигателей также не решает проблемы надежности и экономичности работы тягодутьевых машин в той мере, в какой это необходимо в современных условиях.
Рекомендуется внедрение более совершенных и экономичных тиристорных электроприводов с регулированием производительности тягодутьевых машин путем изменения их скорости. Такие электроприводы позволяют исключить дросселирование при регулировании производительности тягодутьевых агрегатов, реализовать зону оптимальных к. п. д. агрегатов, облегчить режимы пуска и самозапуска, снять ограничения подобных режимов по частоте.
В последнее время на крупных ТЭС начинают внедряться электроприводы по схеме асинхронно-вентильного каскада, дающие заметную экономию электроэнергии. Рекомендуется также более простая и надежная схема регулируемого привода на основе асинхронизированного синхронного двигателя (АСД).
По сравнению с асинхронно-вентильным каскадом схема с АСД является более экономичной, требует меньшей установленной мощности преобразователя частоты при одном и том же диапазоне регулирования частоты вращения тягодутьевых механизмов.
Циркуляционные насосы центробежного типа для ступенчатого регулирования производительности обычно снабжают двухскоростными асинхронными электродвигателями с переключением числа полюсов. Насосы осевого типа снабжают односкоростными асинхронными или синхронными двигателями, а их производительность регулируют поворотом лопастей рабочего колеса.
Для питательных электронасосов используют асинхронные электродвигатели с короткозамкнутым ротором нормального исполнения, поскольку при большом противодавлении достаточно экономичным оказывается дроссельное регулирование производительности и регулирование с помощью гидромуфты.
Большинство механизмов для приготовления и транспорта топлива и почти все подъемно-транспортные устройства имеют практически независимую от частоты вращения механическую характеристику и требуют значительных пусковых моментов. Поэтому для их привода используют асинхронные двигатели с двойной беличьей клеткой на роторе. Для шаровых мельниц с небольшой частотой вращения оказывается выгодной установка тихоходных синхронных двигателей. При этом удается отказаться от редуктора, необходимого при быстроходном, асинхронном приводе. Мельницы не требуют регулирования производительности и при наполненном бункере могут быть отключены без ущерба для технологического процесса. Параметры подобных синхронных двигателей обычно таковы, что их ресинхронизация после восстановления напряжения при перерывах питания более 0,5 с в условиях группового самозапуска оказывается неуспешной, а быстрое автоматическое снижение нагрузки — невозможным.
Поэтому из соображений устойчивости технологического режима блока на ответственных механизмах можно применять лишь синхронные двигатели с такими параметрами, которые при данном типе механизма обеспечивают устойчивую ресинхронизацию после восстановления напряжения и успешный самозапуск асинхронной нагрузки. Там, где эти условия не обеспечиваются, а также на неответственных механизмах синхронные электродвигатели при перерывах питания должны отключаться защитой минимального напряжения с последующим ручным пуском.
Вентиляторы горячего дутья имеют механическую характеристику вентиляторного типа и в зависимости от нагрузки котла и вида топлива требуют регулирования производительности в относительно узких пределах, в среднем на 20—25 % номинальной частоты вращения. Исходя из этого, для их привода используют односкоростные асинхронные электродвигатели, а их производительность регулируют с помощью направляющих аппаратов или дросселей.
На ГЭС основная часть механизмов питается от сети 0,4/0,22 кВ, а отдельные крупные механизмы — от сети 6 кВ. На подстанциях напряжение, как правило, равно 0,4/0,22 кВ. Соответственно для двигателей до 170 кВт принимают напряжение 0,4 кВ, а для более крупных — 3,6 или 10 кВ в зависимости от высшего напряжения собственных нужд станции.
|
|
Дата добавления: 2015-05-08; Просмотров: 1581; Нарушение авторских прав?; Мы поможем в написании вашей работы!