КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Первые поколения контурных СЧПУ
|
|
|
|
Частичная инвариантность по управлению
Контурные СЧПУ
В предыдущей главе рассматривались две системы контурных СЧПУ, где обязательно требуется интерполятор. Первая – с аппаратной реализацией функций интерполяции и унитарным выходным кодом. Вторая – с программной реализацией функций интерполяции и цифровым двоичным кодом. Соответственно, различаются и системы связи со следящим электроприводом.
В позиционных системах можно перемещение по осям осуществлять поочередно. В контурных работают одновременно несколько координат. Следует учитывать разнообразие датчиков положения. Наиболее употребляемые: фотоэлектрические фазоимпульсные, индуктивные фазоимпульсные (вращающиеся трансформаторы, индуктосины).
Во всех контурных системах СЧПУ обязателен скоростной канал задания для реализации частичной инвариантности по управлению.
На рис. 10.3 представлена структурная схема САУ с корректирующим звеном для инвариантности по управлению.
Оператор Лапласа по ошибке из рис 10.3:
δ = Х З – Х вых = Х З – W К W 2 Х З – W 1 W 2 δ.
Передаточная функция ошибки по управлению: 
Чтобы была полная инвариантность по управлению, требуется
W К(p)=  .
.

Рис. 10.3. Структурная схема САУ с корректирующим
звеном для инвариантности по управлению
Применим этот общий вывод к следящему электроприводу, структурная схема которого приведена на рис. 10.4.
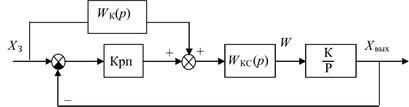
Рис. 10.4. Структурная схема следящего электропривода
с корректирующим звеном для инвариантности по управлению
Регулятор положения в следящем электроприводе может быть только пропорциональным для исключения перерегулирования по выходной координате. Применение ПИ-регулятора положения приводит к недопустимому в траекторных задачах перерегулированию. Однако П-регулятор положения не позволяет исключить скоростную ошибку X вых1 (рис. 10.5).
|
|
|
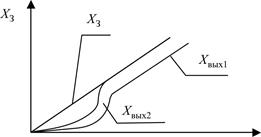
Рис. 10.5. Переходный процесс в следящем
электроприводе при линейной заводке:
Х вых1 – с П-регулятором положения без коррекции;
Х вых2 – с П-регулятором положения с коррекцией
Чтобы получить полную инвариантность по управлению, требуется корректирующее звено
W K (p) =  ,
,
где передаточная функция контура скорости при настройке на «симметричный оптимум»
W KC(p)=  ×(1/ K дс),
×(1/ K дс),
где T c – малая постоянная контура скорости. Тогда
W K(p)= K дс ×  (p+ 4 Tcp 2 + 8 Tc 2 p 3 + 8 Tc 3 p 4).
(p+ 4 Tcp 2 + 8 Tc 2 p 3 + 8 Tc 3 p 4).
Реализация корректирующего звена в микропроцессорной системе приведена на рис. 10.6, где ВЧС – рассчитывает задание X З' и корректирующий сигнал Х к по координатам  ,
,  ,
,  ,
,  с учетом их ограничений, т.е.
с учетом их ограничений, т.е.
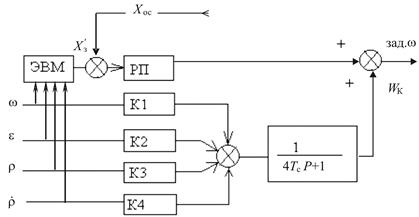
Рис. 10.6. Реализация полной инвариантности по управлению
в микропроцессорной следящей системе
Реально можно ввести в цифровых системах первую производную (скорость), вторую производную (ускорение), третью производную (рывок), существенно снизив ошибку по управлению. В ряде случаев вводится коррекция по 1-й и 2-й производным или только по 1-й производной.
В аппаратных стойках ЧПУ унитарный код уже несет в себе информацию о скорости.
После введения коррекции скоростная ошибка исключается (см. рис. 10.5).
В первоначальных системах ЧПУ широко использовались шаговые двигатели, на систему управления которых поступает сразу унитарный код с интерполятора.* Данные разомкнутые системы в настоящее время вытесняются следящими электроприводами, рассмотренными ниже.
10.6. Фазовый индикаторный и разностный
режимы работы устройства связи с электроприводом
В СЧПУ типа CNC индикаторный режим реализуется по структуре, показанной на рис. 10.7, где ПКФ, ЦАП, ФД (ПФН) – преобразователи информации, принципы работы которых описаны в предыдущих главах. В этом случае a*, ω* – двоичный код, поступающий с интерполятора и блока задания скорости.
|
|
|
Делители частоты ДЧ имеют коэффициент деления N.
Режим работы датчика положения в фазовом индикаторном режиме называют режимом фазовращателя. Это основной режим работы в большинстве аппаратных стоек ЧПУ.
Данная же структура используется и при унитарном коде (перемещение – количество импульсов и задание скорости – частота по данной координате), но вместо ПКФ и ЦАП используются ПЧФ и ПЧН.
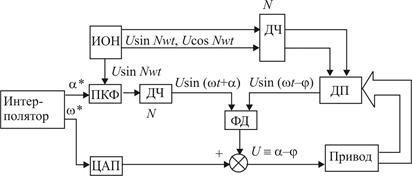
Рис. 10.7. Структура следящего электропривода
с фазовым индикаторным регулятором положения
Фазовый разностный режим работы устройства связи с электроприводом представлен на рис. 10.8. В данной структуре за счет уменьшения зоны работы ФД и того, что ФД работает на постоянной частоте w, итоговая точность СЧПУ возрастает.
Недостаток данной структуры – датчик положения не дает информации об истинном положении привода (для индикации, например), а сразу рассогласование по положению.
Есть системы связи, работающие при амплитудно-индикаторном или амплитудно-разностном режиме работы измерителей рассогласования и датчиков положения*. Такие СЧПУ не нашли распространения, хотя обеспечивают повышенную точность в фазоимпульсных СЧПУ.
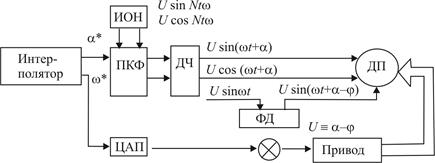
Рис. 10.8. Структура следящего электропривода
с фазовым разностным регулятором положения
В амплитудно-индикаторном режиме на датчик подают
U c1= U 1sinω t, U c2 = 0.
C датчика получаем Up 1 = U 2 sinj sinω t, Up 2 = U 2cosj sinω t.
В амплитудно-разностном режиме
Uc 1 = U 1sinasinω t, Uc 2 = U 1cosasinω t,
Up 1 = U 2sin(j–a)sinω t, Up 2 = U 2 cos(j–a)sinω t.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 726; Нарушение авторских прав?; Мы поможем в написании вашей работы!