КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оптимальное передаточное число редуктора в электроприводе
|
|
|
|
Задача приведения к одному движению при меняющемся передаточном числе редуктора
Ряд электроприводов содержат нелинейные кинематические связи с меняющимся коэффициентом передач между двигателем и рабочим механизмом. Примером передаточного устройства с меняющимся коэффициентом передачи являются кривошипно-шатунный, кулисный и другие подобные механизмы. На рис. показана кинематическая схема электропривода с передаточным устройством в виде кривошипно-шатунного механизма (i≠const). Радиус приведения в них является переменной величиной, зависящей от положения механизма: 
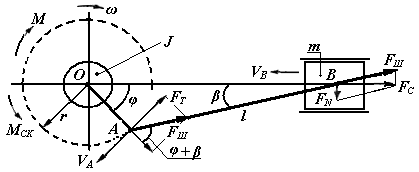
Рис. 2.8 Механическая система с нелинейными кинематическими связями
Представим рассматриваемую систему в виде двухмассовой, первая масса вращается со скоростью ω и имеет момент инерции J, а вторая движется с линейной скоростью V и представляет суммарную массу m элементов, жёстко и линейно связанных с рабочим органом механизма.
Рассмотрим вначале приведение статических усилий и моментов, сделав допущение о пренебрежимо малой величине потерь в кривошипном механизме, т.е. считая его к.п.д. η=1. В этом случае уравнение баланса мощности в кривошипном механизме запишется следующим образом:
 , (2.29)
, (2.29)
где FT – тангенциальное усилие, действующее на конце кривошипа с радиусом r и полученное путем разложения и переноса исходного усилия сопротивления движению FС (рис. 2.8).
Тогда момент сопротивления на валу кривошипа без учета сопротивления трения будет: 
Из разложения сил на рис.2.8 следует, что 
тогда  (2.30)
(2.30)
Момент сопротивления, приведенный к валу двигателя при наличии редуктора в электроприводе с передаточным числом i:
 (2.31)
(2.31)
При большой длине шатуна l, когда l/r ≥ 5 можно принять, что β≈0,  и упростить выражение (2.30):
и упростить выражение (2.30): 
|
|
|
Таким образом, величина МСК меняется в функции углового пути кривошипного вала φ и имеет небольшую постоянную составляющую, определяемую потерями на трение в кривошипном механизме.
Для приведения моментов инерции и движущихся масс к вращающемуся валу (точка «О») кривошипа составим уравнение баланса кинетической энергии кривошипного механизма в реальной и эквивалентной системах:
 (2.32)
(2.32)
где Jпр.к – момент инерции кривошипного механизма, приведенный к валу кривошипа; JК.0 – момент инерции собственно кривошипа, т.е. деталей, вращающихся вокруг центра кривошипа; m – масса ползуна; VB – скорость движения ползуна.
В данном выражении ввиду малости массы момента инерции шатуна составляющая запаса кинетической энергии шатуна при его вращательном и поступательном движениях не учитывается. С учетом известной зависимости V=ω·r приведенный момент инерции кривошипного механизма будет
 (2.33)
(2.33)
Это соотношение упрощается для кривошипных механизмов при β≈0:
 (2.34)
(2.34)
С учетом наличия в электроприводе редуктора момент инерции электропривода, приведенный к валу двигателя, имеющего собственный момент инерции JД, будет равен:
 (2.35)
(2.35)
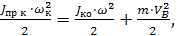
Примерный график изменения приведенного момента инерции JПР.Д=f(φ) показан на рис.2.9.
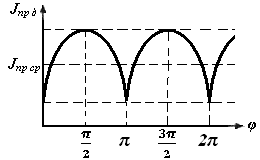
Рис.2.9 Зависимость приведенного момента от угла поворота шатуна
При проектировании электропривода необходимо обеспечить требования технологического процесса и, в частности, необходимую скорость рабочей машины. Таким технологическим требованием может быть и максимальное быстродействие привода в неустановившихся режимах. Обеспечить это требование можно, в частности, изменением передаточного числа редуктора между двигателем и рабочей машиной при выборе двигателя с различной номинальной скоростью без учета системы управления.
|
|
|
Для электроприводов, работающих в длительном режиме работы, при выборе электродвигателя передаточное число редуктора является определяющим значение одного из критериев оптимальности – минимума стоимости оборудования. Действительно, чем выше передаточное число редуктора, т. е. чем он оказывается более сложным по конструкции, например, с червячным зацеплением, большим числом кинематических пар, тем стоимость редуктора оказывается выше. Используя редуктор с меньшим передаточным числом (при неизменной технологической скорости рабочей машины) требуется применение электродвигателя с большей стоимостью из-за технологических особенностей конструкции и стоимости их компонент.
Таким образом, уменьшение передаточного числа ведет к увеличению стоимости двигателя и уменьшению стоимости редуктора. Оптимальное передаточное число iопт находится на пересечении кривых стоимости редукторов и двигателей, как показано на рис.2.10. При реальном проектировании электропривода необходимо построить кривые С=f(i) для двигателей выбранного типа и ряда серийных редукторов. Двигатель и редуктор выбираются по передаточному числу в окрестностях точки пересечения кривых С=f(i) путем выполнения сравнительных технико-экономических расчетов.
Рис. 2.10 К выбору оптимального передаточного числа редуктора ЭП
При повторно-кратковременном режиме работы электропривода выбор скорости двигателя и передаточного числа редуктора оказывается более сложным. Экономическая эффективность электропривода в режиме определяется не столько капитальными затратами, сколько производительностью рабочей машины, прямо зависящей от быстродействия пусковых и тормозных режимов работы двигателя.
Продолжительности пуска и торможения электропривода существенно зависят от величины передаточного числа редуктора.
Время движения при пуске и торможении механизма tм определяются через приведенные к валу механизма переменные как:
 , (2.36)
, (2.36)
где Jм.пр – момент инерции всех вращающихся частей (двигатель, рабочая машина), приведенный к валу механизма;
Мм – пусковой или тормозной момент двигателя, приведенный к валу механизма;
Мсм – момент статического сопротивления на валу механизма (знак (+) в (2.36) - для режима торможения, а знак (-) – для режима пуска рабочей машины.
|
|
|
С учетомпотери в передачах через к.п.д. (η) получим значения времени пуска и торможения электропривода:
 (2.37)
(2.37)
 (2.38)
(2.38)
где JМ – момент инерции механизма;
J'Д – момент инерции двигателя и элементов на его валу (муфта, датчики, быстроходный вал редуктора);
М – пусковой или тормозной момент двигателя (при ступенчатом пуске – среднее значение момента).
Из полученных уравнений видно, что tП=f(i) и tТ=f(i) - экстремальные функции, имеющие минимальное значение при i=iопт. Оптимальные значения iопт.п при пуске или iопт.т при торможении определяются исследованием уравнений (2.37) и (2.38) на экстремум из условия:

Приравняв нулю числитель, получим  решениякоторого для режимов пуска и торможения будут:
решениякоторого для режимов пуска и торможения будут:
 (2.39)
(2.39)
Перед корнем надо учитывать при расчетах лишь знак (+). При знаке (-) iрпт.п не имеет физического смысла (iопт.п<0).
Аналогично можно получить выражение для расчета оптимального передаточного числа при торможении:
 (2.40)
(2.40)
Так как iопт.п ≠ iопт.т, то при реальных расчетах принимают среднее, либо средневзвешенное значение по известным выражениям.
Если привод имеет большие моменты инерции и незначительную статическую нагрузку, т.е. при  , величина оптимального передаточного числа приближенно может быть найдена по упрощенной формуле:
, величина оптимального передаточного числа приближенно может быть найдена по упрощенной формуле:
 . (2.41)
. (2.41)
Расчетное значение iопт, как правило, не совпадает с конкретными передаточными числами серийных редукторов. В этом случае при выборе передаточного числа лучше принимать ближайшее большее значение, так как при этом потери ускорения механизма будут меньше.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 4195; Нарушение авторских прав?; Мы поможем в написании вашей работы!