КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методика решения задач статики на равновесие
Инварианты системы сил. Уравнение центральной оси системы сил
Поговорим о главном векторе системы сил. Он не зависит от центра приведения, следовательно,
 =const. (I)
=const. (I)
Главный вектор системы сил инвариантен к центру приведения.
На рис. 56 а видно  , где
, где  (cм. случай приведения 5, рис. 58 б).
(cм. случай приведения 5, рис. 58 б).
Эту запись можно записать в форме скалярного умножения:
 ,
, 
или
 . (1)
. (1)
Отсюда получается формула для вычисления наименьшего главного момента
 (2)
(2)
Обозначения составляющих см. на с.79, формулы (1а), (2а), где определяли главный вектор системы сил и главный момент через проекции на координатные оси. Из формулы (1) получим значение наименьшего главного момента  через проекции главного вектора и главного момента
через проекции главного вектора и главного момента  ,
,  на координатные оси.
на координатные оси.
Если будем выбирать любой центр приведения, то увидим, что
 (II)
(II)
Результат показывает, скалярное произведение главного вектора на главный момент данной системы сил инвариантно по отношению к центру приведения.
При приведении системы сил к любой из точек центральной оси получаются две инвариантные величины
и , они представляет собой динаму.
Так как и направлены по одной прямой, то одноименные их проекции пропорциональны:
 ,
,

Получили уравнение центральной оси системы сил.
Здесь постоянными величинами являются проекции главного вектора системы сил на координатные оси;
постоянными величинами являются проекции на те же оси главного момента системы сил относительно начала координат  ; а также наименьший момент на те же оси.
; а также наименьший момент на те же оси.
10. Равновесие объекта под действием системы сил:
10.1. Равновесие тела под действием произвольной системы сил в пространстве и на плоскости
Состояние объекта является покой или поступательное прямолинейное движение тела.
Главный вектор системы сил, действующих на объект, равен нулю. Главный момент сил, действующих на объект, равен нулю.
 (1)
(1)
(I)
 (2)
(2)
где k=1,2,….,n. Формула (I) означает векторную форму записи условия равновесия тела.
Главный вектор системы сил можно записать через её проекции:
 , (a)
, (a)
где  ,
,  ,
,  (1a),
(1a),
где проекции главного вектора системы сил представлены через алгебраические суммы проекций системы сил на те же координатные оси x, y, z. Следовательно, при равновесии главный вектор сил можно записать через три условия равновесия системы сил на координатные оси
 ,
,  (1*)
(1*)
Главный момент сил относительно заданного центра или вектор-момент главной пары можно записать через проекции по формуле:

 ,
,
или (б)
 .
.
Запишем проекции главного момента как алгебраические суммы моментов системы сил на те же координатные оси
 ,
,  (2б)
(2б)
Следовательно, при равновесии главный момент сил можно записать через три условия равновесия моментов системы сил на координатные оси x, y, z
 ,
,  (2*)
(2*)
1.Условия равновесия тела в пространстве под действием произвольной системы сил в координатной форме можно представить:



(II)

 .
.
Получили шесть условий равновесия тела под действием системы сил, т.к. тело в пространстве имеет шесть степеней свободы, которые закрываются. Первые три условия закрывают любые перемещения тела относительно координатных осей x, y, z. Вторая тройка условий равновесия тела закрывают любые повороты его относительно тех же координатных осей
2.Условия равновесия тела в плоскости под действием произвольной системы сил в координатной форме можно представить:
 (III)
(III)

Так как тело в плоскости имеет три степени свободы,
то получили три условия равновесия тела под действием системы сил и три степени свободы закрываются. Первые два условия закрывают любые перемещения тела относительно координатных осей x, y. Третье условие равновесия закрывает любой поворот тела относительно любой точки тела. Получили универсальную форму (III) условий равновесия в плоскости или соновную форму.
Есть еще две формы записи условий равновесия тела в плоскости, но они имеют частный характер и записываются при определенном условии. Рассмотрим их.
СЛУЧАЙ 1. Тело в плоскости находится в равновесии под действием произвольной системы сил.
При этом ось  не должна быть перпендикулярна прямой, проходящей через точки А и В.
не должна быть перпендикулярна прямой, проходящей через точки А и В.
Тогда система трех условий равновесия записывается:
 ,
,  ,
,  (IV)
(IV)
Покажем, что при этих условиях система сил, произвольно расположенная в пространстве удовлетворяет записи (IV).
Доказательство проведем от противного (см. рис. 63). Пусть система сил приводится к равнодействующей . Моменты этой силы относительно точек А и В равны нулю. Проекция равнодействующей силы на ось, которая перпендикулярна прямой, проходящей через две точки А и В, равна нулю. Тогда появляется противоречие: равновесия нет, но по записи равновесие есть. Следовательно, чтобы не было противоречия необходимо, чтобы выбранная ось х была не перпендикулярна прямой, проходящей через точки А и В, если нет равновесия. При равновесии системы сил равнодействующая на любую ось, например, u должна быть равна нулю:

Таким образом, форма записи (IV) справедлива.
Рис. 63
Случай 2. Тело в плоскости находится в равновесии под действием произвольной системы сил.
При этом точки А, В, С не должны лежать на одной прямой.
Тогда система трех условий равновесия записывается:
, ,  , (V)
, (V)
Покажем, что при этих условиях система сил, произвольно расположенная в пространстве удовлетворяет записи (V).
Доказательство проведем от противного (см. рис. 64).
Пусть система сил приводится к равнодействующей . Моменты равнодействующей силы относительно точек А и В равны нулю. Если бы точка С принадлежала прямой х, на которой находятся точки А и В, то момент равнодействующей силы также был бы равен нулю, что
невозможно, т.к. равновесия нет. В случае не равновесия
системы сил нужно выбрать точку С не на прямой, проходящей через точки А и В, тогда 
При равновесии системы сил равнодействующая относительно любой точки С, не лежащей на прямой, проходящей через две точки А и В, должна быть равна нулю .
Таким образом, форма записи (V) справедлива.
Рис. 64
10.2. Равновесие тела под действием параллельных сил в пространстве и на плоскости
А. Равновесие объекта под действием параллельных
сил в пространстве
Условия равновесия тела в пространстве под действием параллельной системы сил в координатной форме можно представить (см. рис. 65):

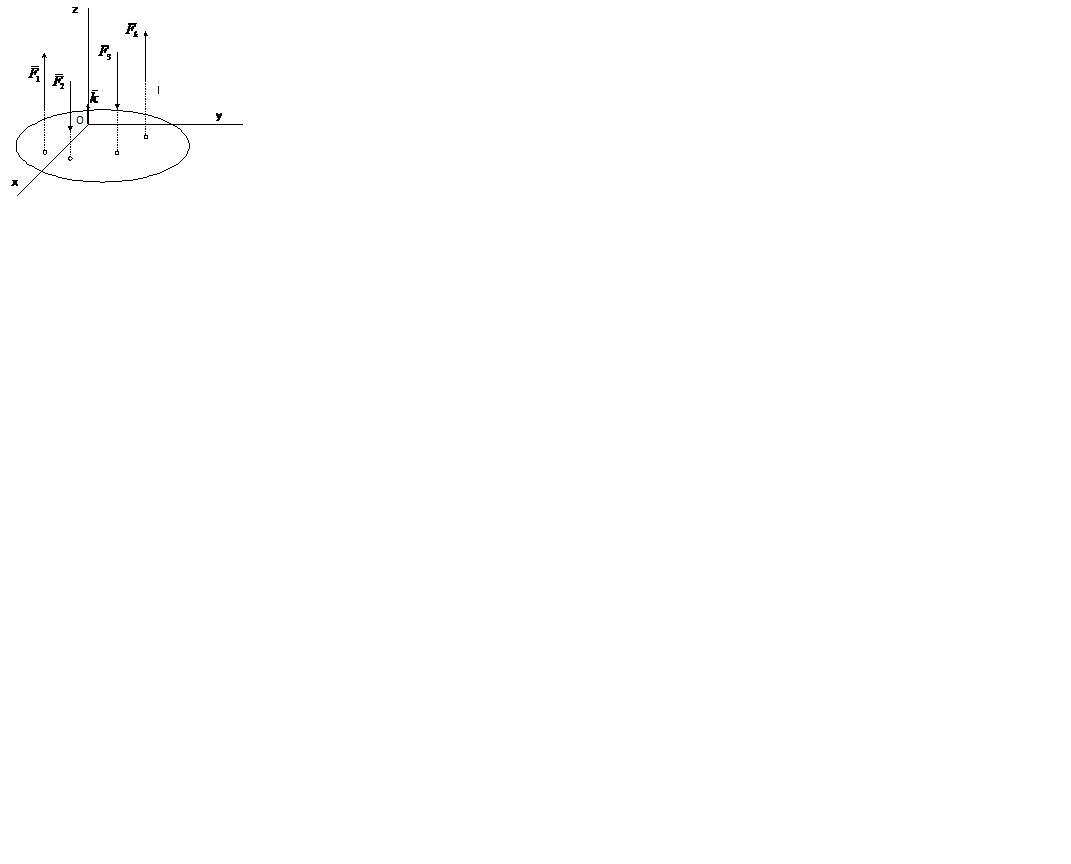
 (VI)
(VI)

Рис. 65
На рис. 65 даны параллельные силы  ,
,
k=1, 2,…,.n и они параллельны оси z, т.е.
 .
.
Данные силы в общем случае приводятся к главному вектору и к главному моменту  (см. приведение параллельных сил в теме «Центр тяжести»).
(см. приведение параллельных сил в теме «Центр тяжести»).
Получили три условия равновесия (VI), потому что линии действия сил параллельны оси z, следовательно, они не дают проекции на другие координатные оси х и у и создают осевые моменты сил относительно осей х и у.
В. Равновесие тела под действием параллельных
сил на плоскости
Условия равновесия тела на плоскости под действием параллельной системы сил в координатной форме можно представить (см. рис. 66):

(VII)

Рис. 66
Данные параллельные силы , k=1, 2,…,.n и они параллельны оси y, т.е.
 .
.
Получили два условия равновесия (VII), потому что линии действия сил параллельны оси y, следовательно, они не дают проекции на ось х и создают моменты заданных сил относительно любой точки, например, точки А.
10.3. Равновесие тела под действием
сходящихся сил в пространстве и на плоскости
Все сходящиеся силы приводятся к равнодействующей. Если тело под действием сходящихся сил находится в равновесии, главный вектор системы сходящихся сил, или равнодействующая  равен нулю.
равен нулю.
Условия равновесия тела в пространстве под действием сходящейся системы сил в координатной форме можно представить:
 (VIII)
(VIII)
Получили три условия равновесия, т.к. сходящиеся силы приводятся к равнодействующей, а главный момент системы сил не рассматривается, потому что моменты всех сил относительно точки их пересечения равны нулю (см. рис. 67).
Рис. 67
 ,
,

Получили три условия равновесия (VIII).
|
|
Дата добавления: 2015-06-04; Просмотров: 1095; Нарушение авторских прав?; Мы поможем в написании вашей работы!