КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Напишите и сформулируйте три формы условий равновесия произвольной плоской системы сил
|
|
|
|
I. 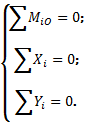
Для равновесия плоской системы сил, необходимо и достаточно, чтобы суммы проекций этих сил на каждую их двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равная нулю.
II. 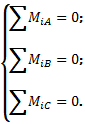
Для равновесия плоской системы сил, необходимо и достаточно, чтобы суммы моментов всех сил относительно любых трёх точек, не лежащих на одной прямой, были равны нулю.
III. 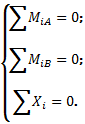
Для равновесия плоской системы сил, необходимо и достаточно, чтобы суммы моментов всех сил относительно любых двух точек А и В и сумма проекций всех сил на ось Ох, не перпендикулярную прямой, проходящей через точки А и В, были равны нулю.
20. Какие статические инварианты вам известны? Запишите статистические формулы.
Инвариант – величина, которая не изменяется при любом ее преобразовании.
Первый инвариант системы сил – главный вектор системы сил.  .
.
Второй инвариант системы сил – скалярное произведение главного вектора на главный момент этой системы.  .
.
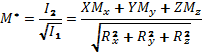
21. Каков геометрический смысл второго инварианта? Что такое минимальный момент и чему он равен?
Второй инвариант – это проекция главного момента на направление главного вектора системы, то есть он является наименьшим главным моментом системы сил.
22. Как зависит главный момент системы сил от выбора центра приведения? Запишите соответствующую формулу и ее формулировку.
Главный момент системы сил относительно нового центра приведения  равен сумме главного момента относительно старого центра приведения
равен сумме главного момента относительно старого центра приведения  и момента главного вектора относительно нового центра в предположении, что он приложен в старом центре .
и момента главного вектора относительно нового центра в предположении, что он приложен в старом центре .
|
|
|

Случай 1. Если главный вектор данной системы сил равен нулю, то главный момент не зависит от выбора центра приведения.
Случай 2. Если главный вектор равен нулю и существует точка, относительно которой главный момент равен нулю, то главный момент будет равен нулю относительно любого другого центра приведения.
Случай 3. Главный момент данной системы сил одинаков для всех точек прямой, параллельной главному вектору.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1504; Нарушение авторских прав?; Мы поможем в написании вашей работы!