КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Свойства силы и пар сил
Статика
В статике изучают свойства сил и определяют условия равновесия тел.
Сила есть мера механического действия одного тела на другое, которая проявляется в виде деформации или изменения движения тела.
Сила есть приложенный вектор, изображаемый из точки приложения силы, определяемый двумя векторами: вектором  и радиус-вектором
и радиус-вектором  точки её приложения.
точки её приложения.
Силу можно задавать в декартовой системе отсчета шестью скалярами: тремя проекциями силы на оси координат X, Y, Z и тремя координатами x,y,z точки приложения силы.
Силу, приложенную к абсолютно твердому телу можно считать скользящим вектором, т.е. силу можно перемещать вдоль линии её действия, минуя точку приложения, поскольку известно, что при этом механическое действие силы на тело, способность разгонять и раскручивать тело не меняются. Параллельный перенос силы не допустим - при переносе силы на параллельную линию, изменяется её вращательная способность. Силу можно раскладывать на составляющие, т.е. – заменять несколькими силами, приложенными в прежней точке тела.
Нередко, заменяют тремя составляющими:
 .
.
Пару сил можно считать приложенной в любом месте твердого тела, момент пары есть свободный вектор, который обычно изображается из точки приложения одной из двух сил, либо – из середины плеча пары.
Внешние силы, приложенные к телу, разделяют на неизвестные силы (реакции опор, связей) и известные силы (приложенные нагрузки). В некоторых случаях известно направление реакции опоры, тогда имеем только одну неизвестную – модуль реакции опоры.
Применяется следующий прием: если в каком-либо направлении связь не препятствует бесконечно малому перемещению тела, то реакция этой связи перпендикулярна этому направлению. Система сил, приложенных к телу, называется плоской, если все неизвестные и известные силы расположены в некоторой одной плоскости 0xy.
Скалярным моментом силы относительно точки O называется произведение модуля силы и плеча силы со знаком, определяющим направление кажущегося вращения силы вокруг точки
Теорема. Если тело находится в состоянии равновесия (не движется), то система всех приложенных к нему внешних сил удовлетворяет трем алгебраическим уравнениям равновесия, а именно, равны нулю сумма моментов всех приложенных сил и суммы проекций сил на две оси координат:

Пример 1
|
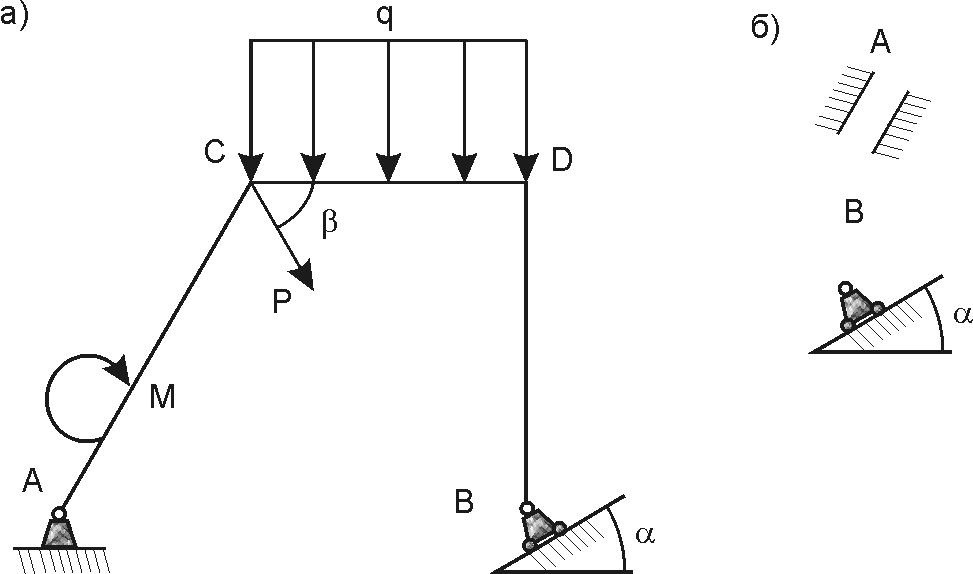
| Рис.1 Рисунок к задаче |
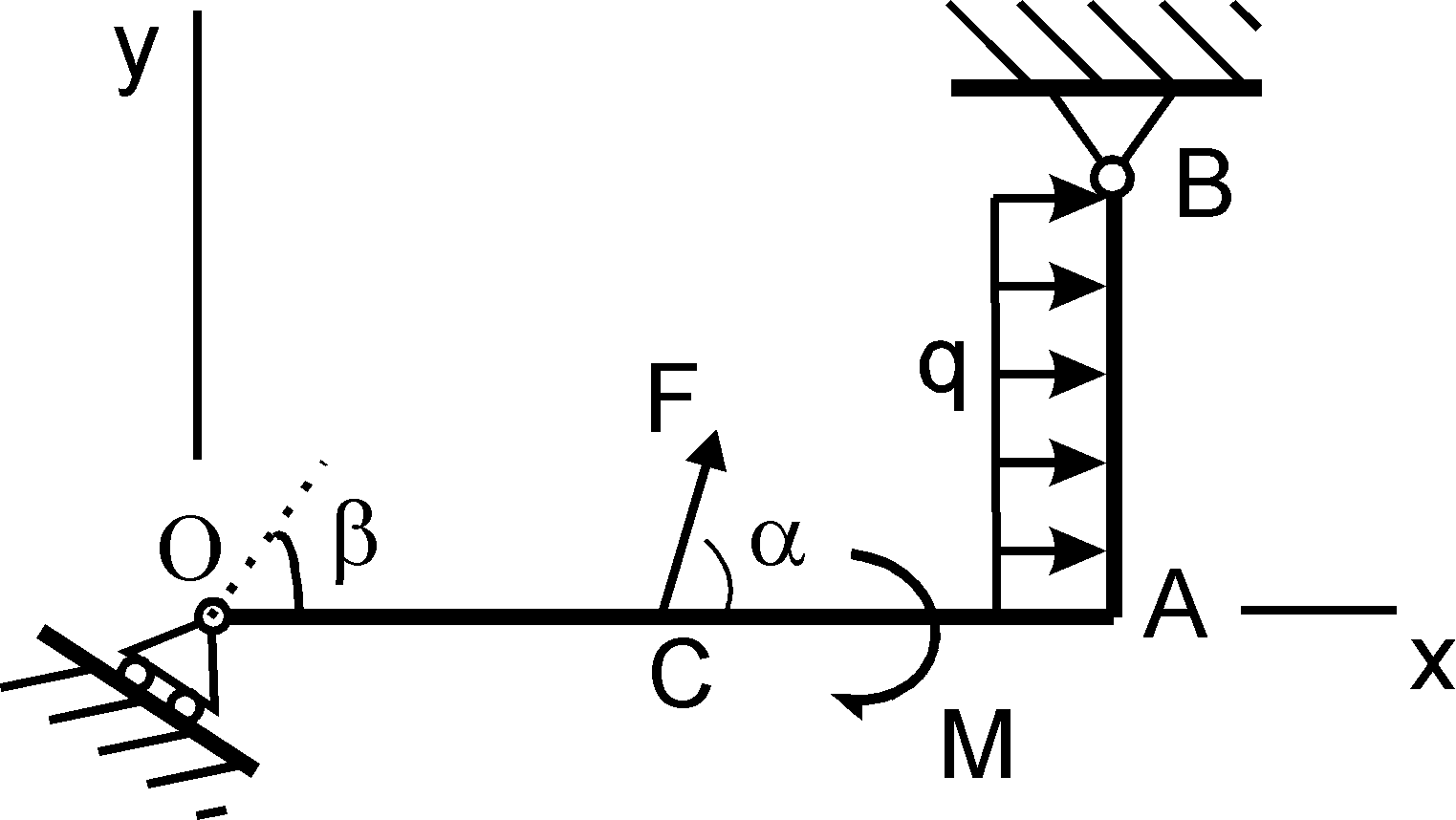
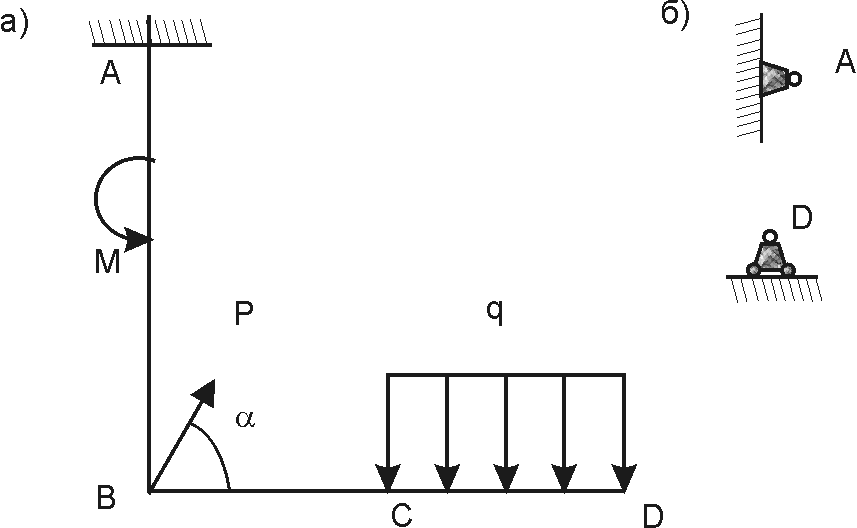
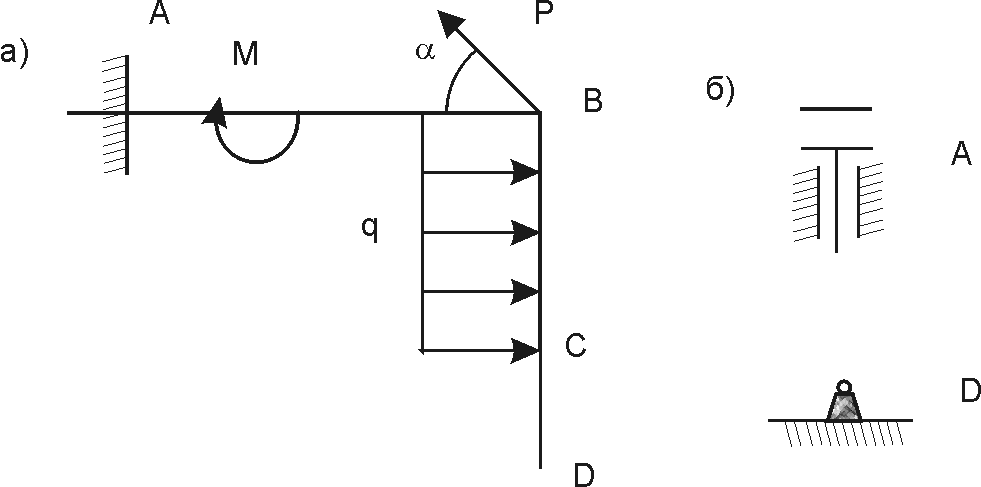
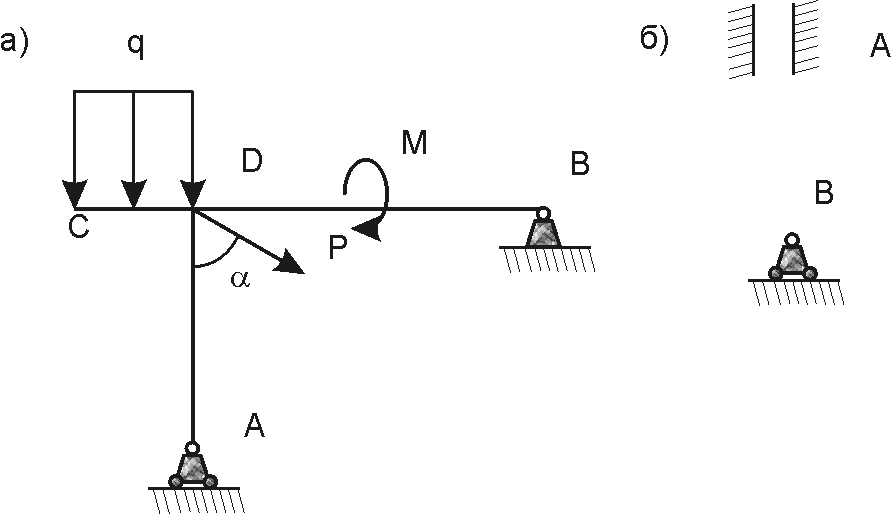
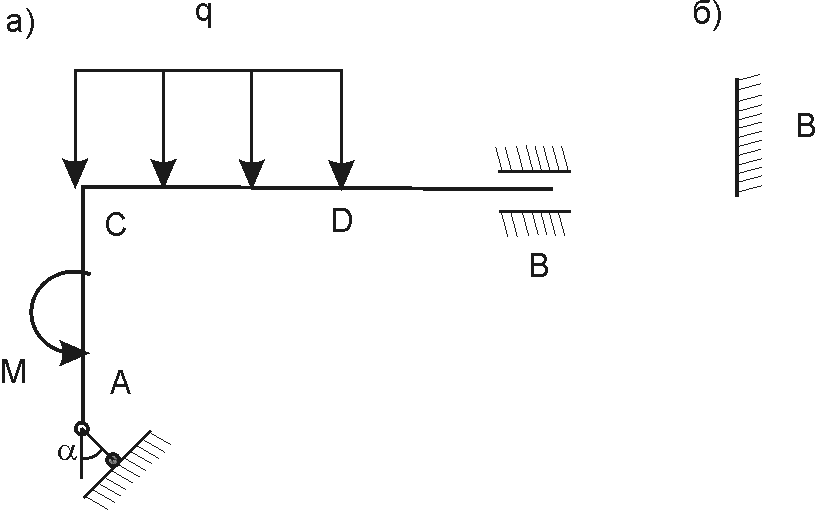
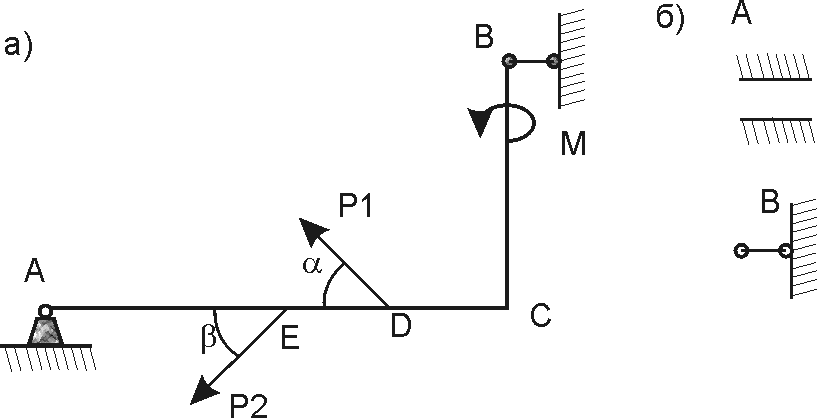
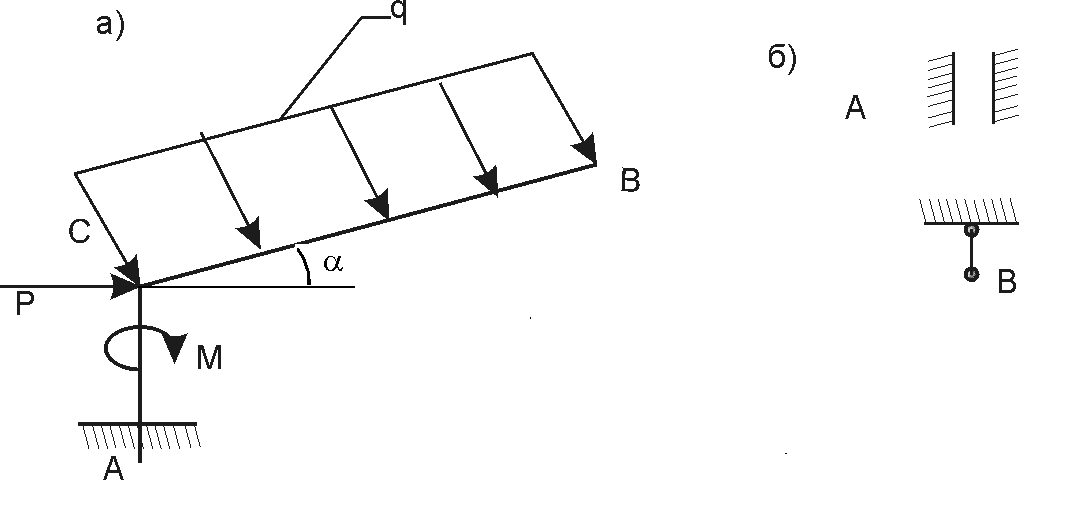
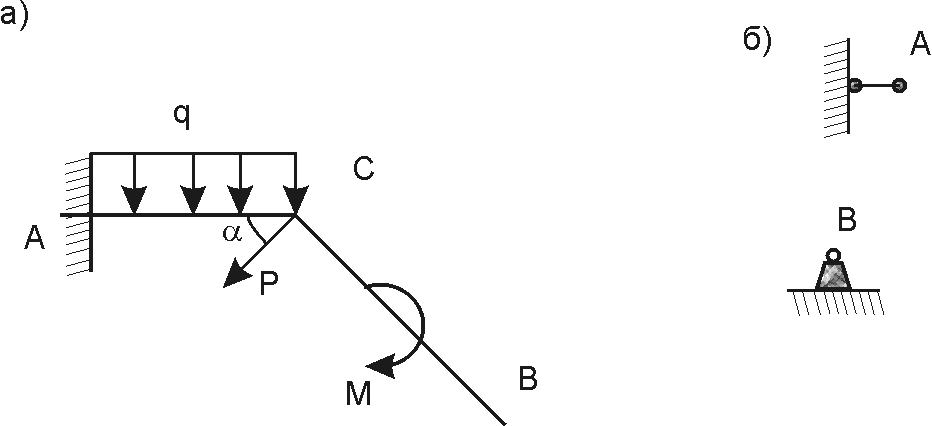
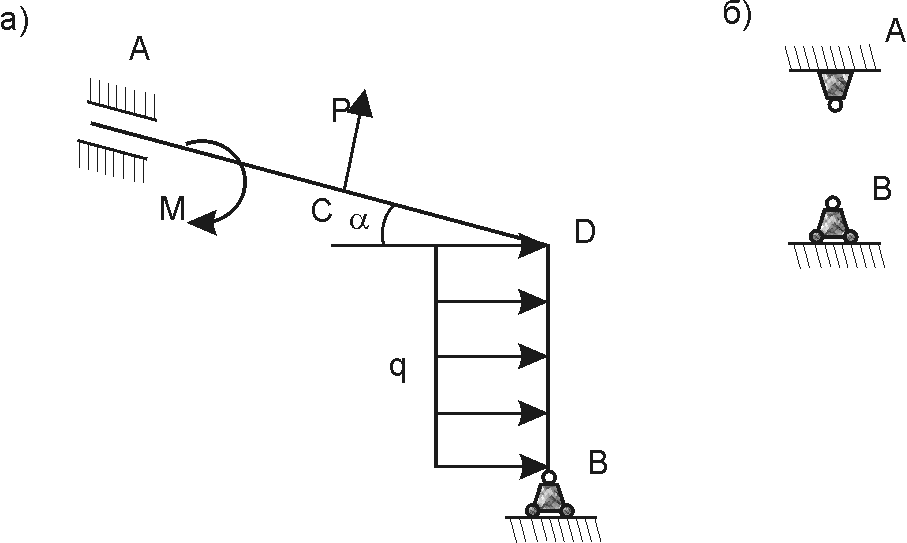
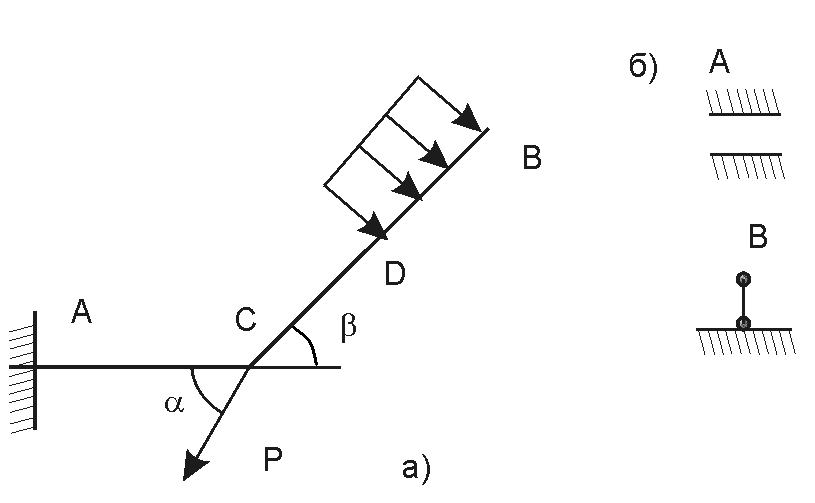
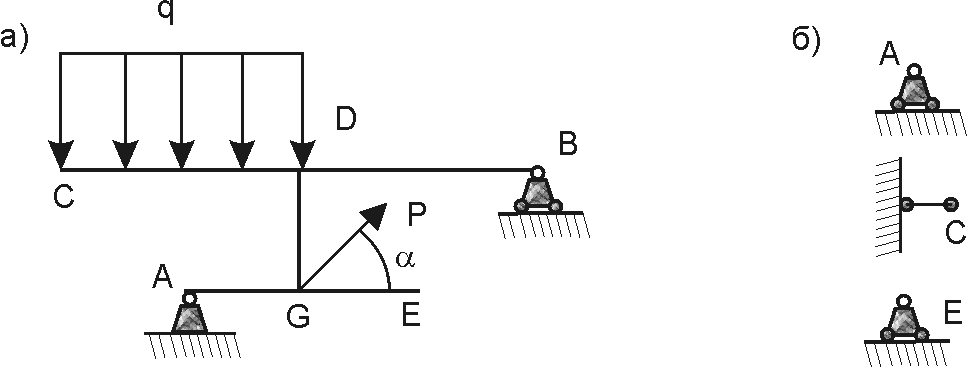
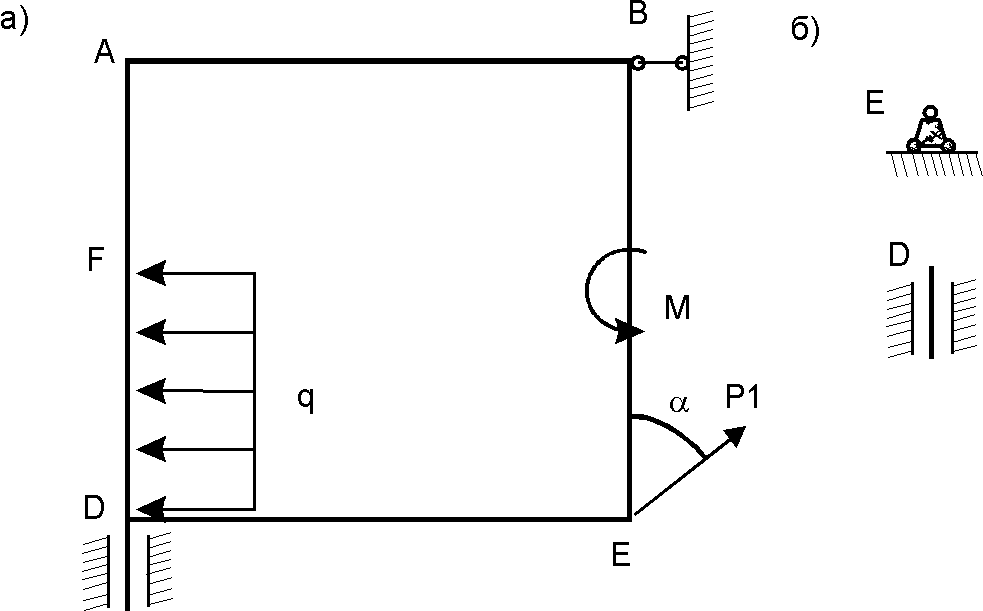
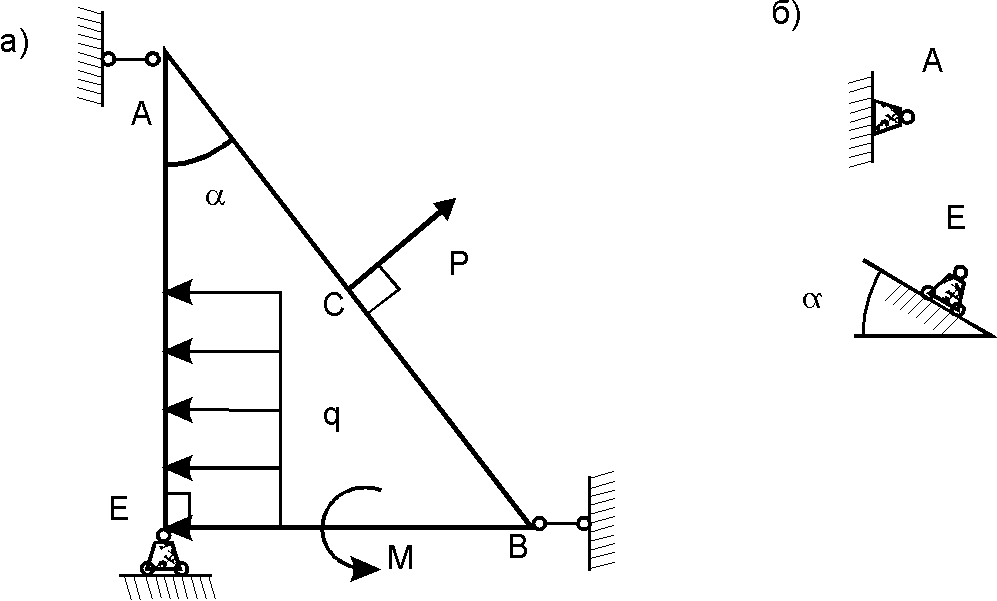
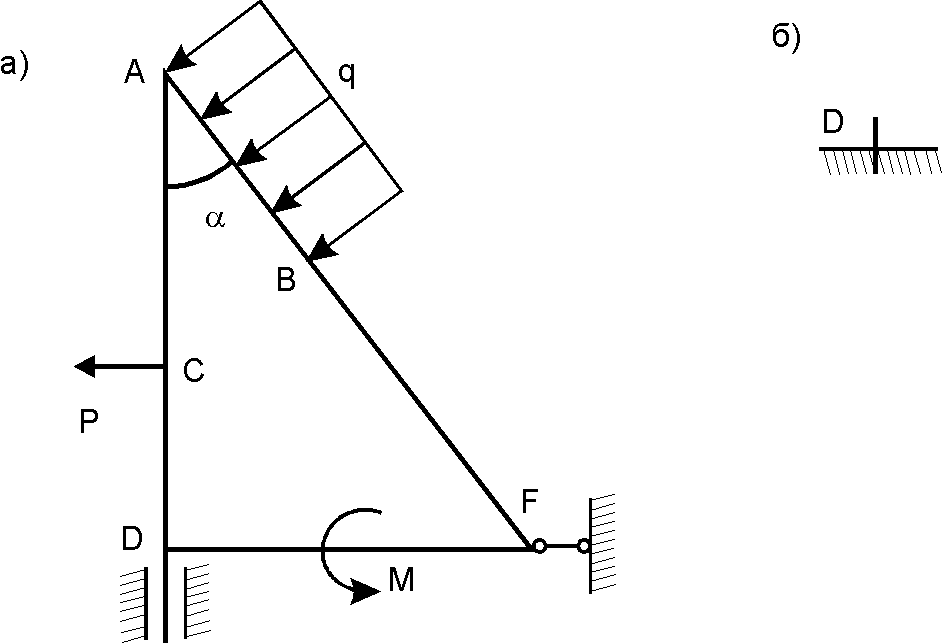
Криволинейный стержень ОАВ, опирающийся на каток и шарнир находится в состоянии равновесия. Определить реакции связей. Задан линейные размеры, и величины сосредоточенной силы  и интенсивность распределенной нагрузки
и интенсивность распределенной нагрузки  , а также - момент
, а также - момент  пары приложенных сил (Рис.1)
пары приложенных сил (Рис.1)
Решение.
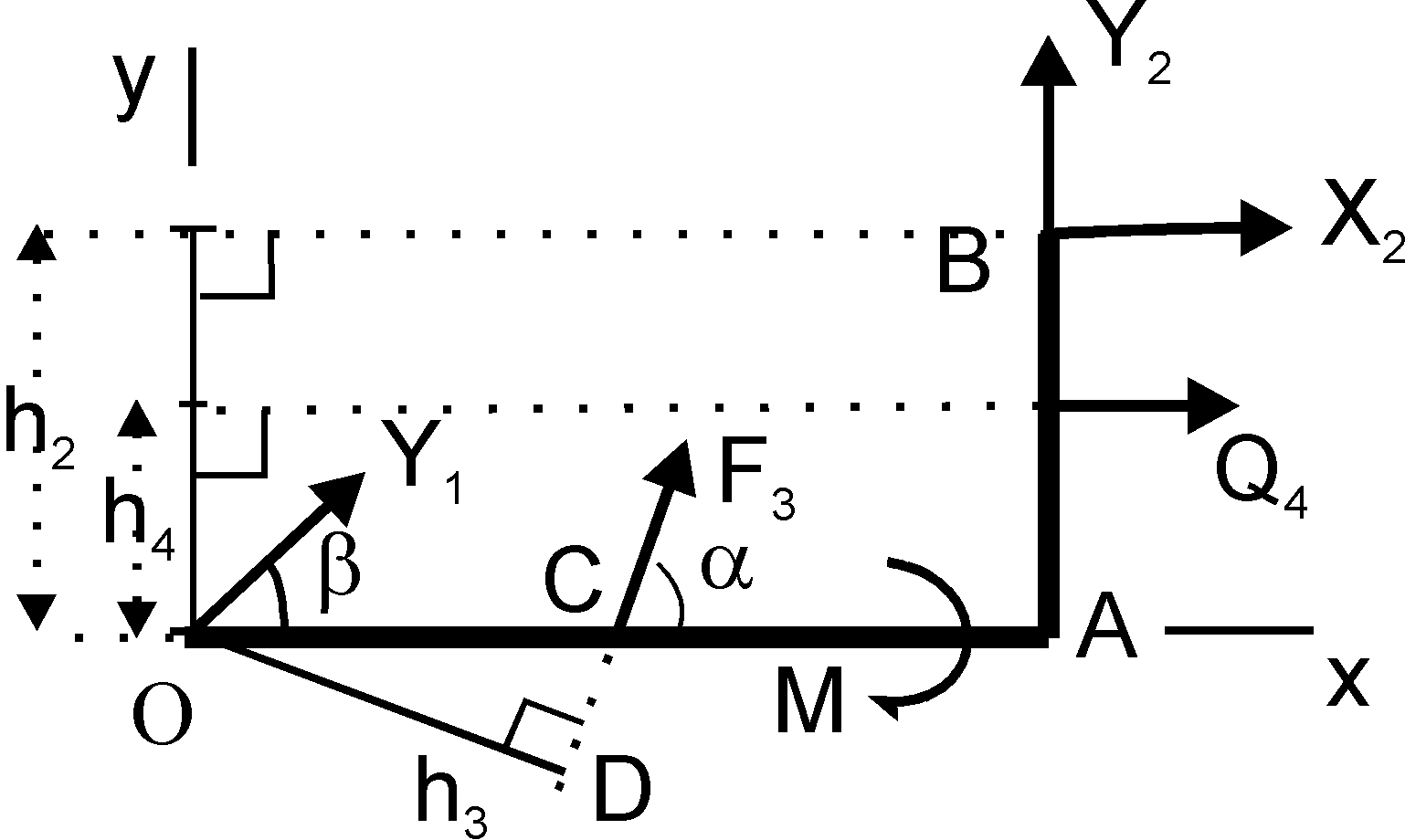
Освободим тело от связей, но сохраним действие связей и заменим нагрузку интенсивностью на равнодействующую  , приложенную к середине участка приложения распределенной нагрузки (рис. 2). Неизвестные реакции связей
, приложенную к середине участка приложения распределенной нагрузки (рис. 2). Неизвестные реакции связей  направляем в положительную сторону. Продолжим пунктиром линии действия сил и покажем плечи сил относительно точки О, отметим знаком (±) направления вращения силы вместе с плечом вокруг точки О. А также перенумеруем все силы, в частности переобозначим:
направляем в положительную сторону. Продолжим пунктиром линии действия сил и покажем плечи сил относительно точки О, отметим знаком (±) направления вращения силы вместе с плечом вокруг точки О. А также перенумеруем все силы, в частности переобозначим: 
|
| Рис.1 Реакции опор и плечи сил |
 плечо силы
плечо силы 
 – плечо силы
– плечо силы  , знак (-)
, знак (-)
 – плечо
– плечо  , знак (+)
, знак (+)
 – плечо
– плечо  , знак (+), где
, знак (+), где 
 – плечо
– плечо  , знак (-)
, знак (-)
Составим в табличной форме два уравнения проекций и уравнение моментов относительно точки  :
:

| 
| 
| 
| 
| M | ||
|
| +0 | + 
| +
| + 0 | = 0 | |
|
| +
| 
| + 0 | + 0 | = 0 | |
| - 
| + 
| 
| 
| 
| = 0 |
Далее, выражая длину плеч сил через известные размеры и углы, получим систему трех линейных алгебраических уравнений относительно трех неизвестных реакций опор 

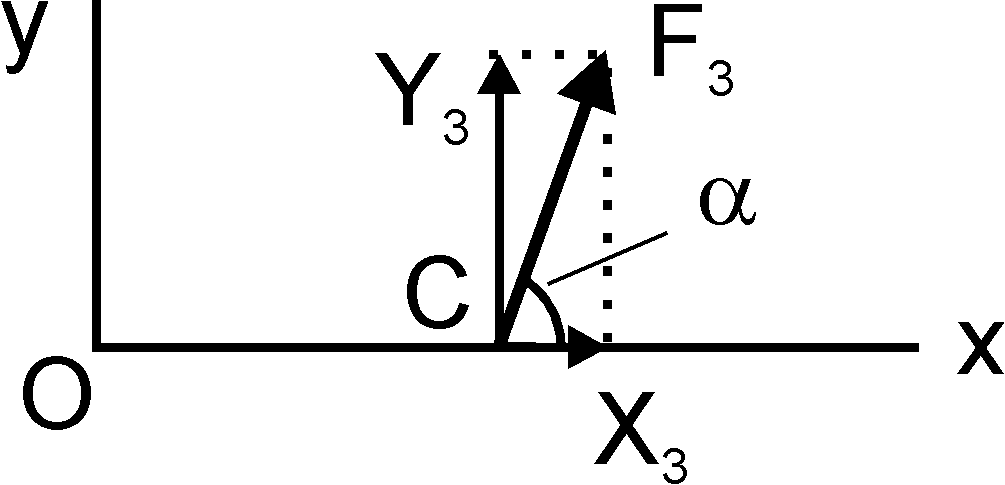
Замечание: момент любой силы можно также находить и методом разложения на составляющие, что упрощает вычисление плеч сил.
Например, имеем (рис. 3)
|
| Рис. 3 Момент силы как сумма моментов ее проекций |

Пример 2
|
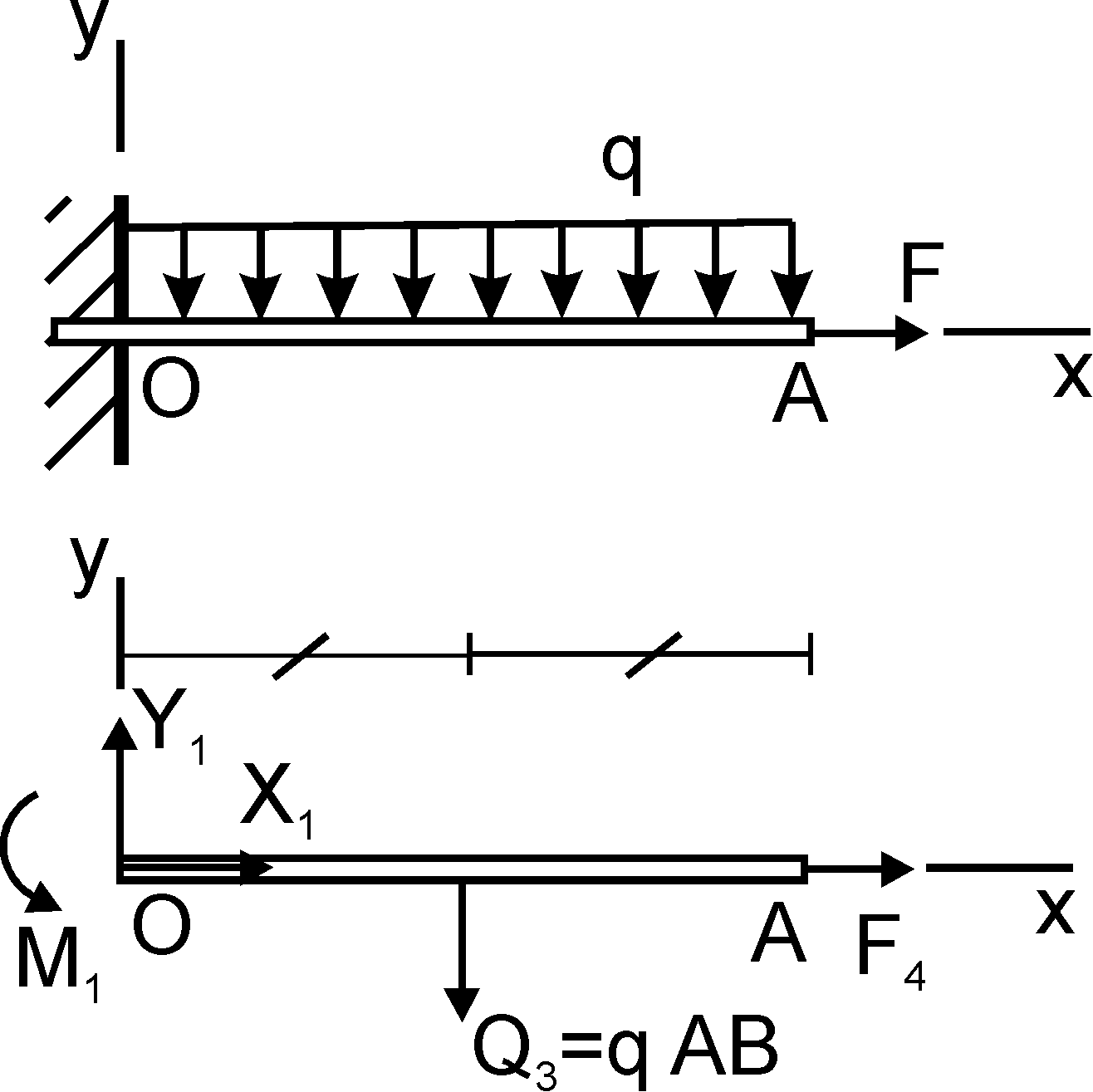
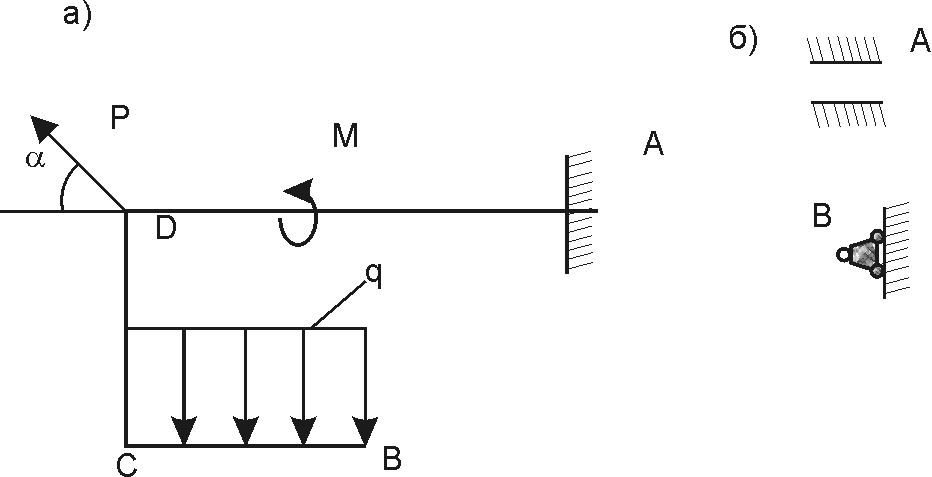
| Рис. 4 Рисунок к задаче |
Консольная балка, закрепленная в стене. (рис. 4), нагруженная растягивающей силой F и поперечной расперделенной нагрузкой q (например - собственным весом).
Решение
В заделке возникает реакция в виде составляющих  , а так же - пара сил с неизвестным моментом
, а так же - пара сил с неизвестным моментом  удерживающие балку от вращения. Относительно О имеем плечи сил (со знаком) и уравнения равновесия в табличной форме:
удерживающие балку от вращения. Относительно О имеем плечи сил (со знаком) и уравнения равновесия в табличной форме:

|
| 
| 
| 
| 
| ||
|
| 
| + 
| + 0 | + 0 | = 0 | |
|
|
| +0 | +0 | 
| + 0 | = 0 |
|
| 
| 
|
| = 0 |
В результате получаем систему уравнений вида
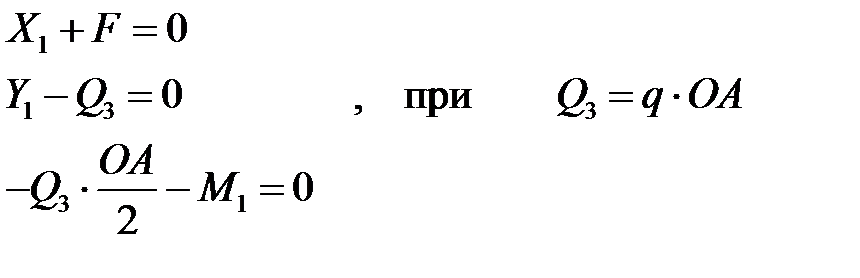
Отсюда окончательно получаем неизвестные реакции опоры:

|
|
|
|

|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 552; Нарушение авторских прав?; Мы поможем в написании вашей работы!