КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение реакций опор твердого тела, закрепленного при помощи шарниров
|
|
|
|
Исходные данные
Розрахунково-графічна робота
«Статика твердого тіла»
 Роботу виконав студент групи ТМ-71Б
Роботу виконав студент групи ТМ-71Б
Індекс групи
Дига В.В 4.12.2012
Прізвище, ініціали Дата Підпис
Роботу перевірив
Доц. Ромашов Ю.В
Посада Прізвище, ініціали Дата Підпис
Харків - 2012
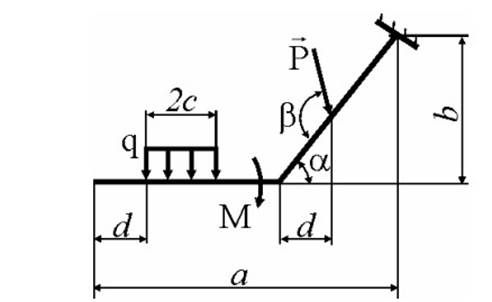
Определить реакции опор изогнутого невесомого стержня, нагруженного сосредоточенной силой  , равномерно распределенной нагрузки постоянной интенсивности q и парой сил с моментом, равным М. Рассмотреть случаи закрепления стержня при помощи подвижного и неподвижного шарниров (рис. 1), а также закрепленного при помощи жесткой заделки(рис. 2). Геометрические параметры конструкции и действующие на тело активные силы приведены ниже:
, равномерно распределенной нагрузки постоянной интенсивности q и парой сил с моментом, равным М. Рассмотреть случаи закрепления стержня при помощи подвижного и неподвижного шарниров (рис. 1), а также закрепленного при помощи жесткой заделки(рис. 2). Геометрические параметры конструкции и действующие на тело активные силы приведены ниже:
a = 5 (м)
b = 2 (м)
c = 3 (м)
d = 0,5 (м)
α = 60
β = 120
M = 4000 (H*м)
 q = 3000 (H/м)
q = 3000 (H/м)
Рассмотрим равновесие стержня, закрепленного при помощи неподвижного и подвижного шарниров. Для этого стержень будем считать свободным, отброшенных связи и заменив их действие реакциями. В рассматриваемой задаче число неизвестных реакций равно трем: Реакции  и
и  в неподвижном шарнире А и реакция
в неподвижном шарнире А и реакция  в подвижном шарнире В. Направление реакций выбраны произвольно. Распределенную нагрузку заменим статически эквивалентной сосредоточенной силой
в подвижном шарнире В. Направление реакций выбраны произвольно. Распределенную нагрузку заменим статически эквивалентной сосредоточенной силой  , приложенной посередине участка, на котором действуют распределенный силы, и имеющей модуль:
, приложенной посередине участка, на котором действуют распределенный силы, и имеющей модуль: 
Введем декартову систему координат, начало О которой совместим с осью А неподвижного шарнира, ось Ох направим по горизонтали вправо, ось Оу – по вертикали вверх, а ось Оz – перпендикулярно плоскости, так чтобы система координат Oxyz была правой. Условия равновесия стержня имеют вид:

Где моменты всех сил вычисляются относительно точки А – оси неподвижного шарнира. Чтобы записать условия равновесия, определим проекции на оси Х и У действующих на тело сил. Составим таблицу:
|
|
|
| Силы и пары сил | Проекции сил на координатные оси | Координаты точек приложения сил | Моменты сил та пар сил
(x*  -y* -y*  ) )
| ||
|
|
| x | y | ||

| P*cos(α+γ) | -P*sin(α+γ) | a | -a*Psin(α+γ) | |
|
| Q*cos(β-90) | -Q*sin(β-90) | m-2*d*cos60 | b-2*d*sin60 | -Q*sin(β-90)*(m-2*d*cos60)- Q*cos(β-90)*(b-2*d*sin60) |

| - | - | - | - | -M |

| 
| ||||

| 
| ||||

|  *cos(90-γ) *cos(90-γ)
| *sin(90-γ)
| c | tgγ*g | *sin(90-γ)*c- *cos(90-γ)* tgγ*g
|
Примечание:
m= 

Используя данные из таблицы, получаем условия равновесия стержня:
P*cos(α+γ)+ Q*cos(β-90) + *cos(90-γ)=0
*sin(90-γ) -P*sin(α+γ) -Q*sin(β-90) + =0
-a*Psin(α+γ) -Q*sin(β-90)*(m-2*d*cos60)- Q*cos(β-90)*(b-2*d*sin60) –M+ *sin(90-γ)*c- *cos(90-γ)* tgγ*g =0
Условия равновесия представляют собой систему уравнений для определения неизвестных реакций:
 =P*cos(α+γ) + Q*cos(β-90)+ *cos(90-γ)
=P*cos(α+γ) + Q*cos(β-90)+ *cos(90-γ)
=  *sin(90-γ) +P*sin(α+γ) +Q*sin(β-90)
*sin(90-γ) +P*sin(α+γ) +Q*sin(β-90)
= (a*Psin(α+γ) +Q*sin(β-90)*(m-2*d*cos60)+ Q*cos(β-90)*(b-2*d*sin60) +M)/(sin(90-γ)*c- cos(90-γ)* tgγ*g)
Вычислим величины, входящие в уравнение равновесия:
 =3000 (Н)
=3000 (Н)
m= =  )
)

γ= 27,1 
= (a*Psin(α+γ) +Q*sin(β-90)*(m-2*d*cos60)+ Q*cos(β-90)*(b-2*d*sin60) +M)/(sin(90-γ)*c- cos(90-γ)* tgγ*g)
 =(5*3500*0,998+3000*0,5*0,65+3000*0,86*1,14+4000)/(0,89*3-0,45*0,52*2)=(17465+975+2941,2+4000)/(2,67-0,464)=25381,2/2,206= 11524 (H)
=(5*3500*0,998+3000*0,5*0,65+3000*0,86*1,14+4000)/(0,89*3-0,45*0,52*2)=(17465+975+2941,2+4000)/(2,67-0,464)=25381,2/2,206= 11524 (H)
 =
=  -5263,3 (H)
-5263,3 (H)
 =3500*0,05+3000*0,86+11524*0,45= 175+ 2580 + 5177,5= 7940,8 (H)
=3500*0,05+3000*0,86+11524*0,45= 175+ 2580 + 5177,5= 7940,8 (H)
| Силы и пары сил | Проекции сил на координатные оси | Координаты точек приложения сил | Моменты сил та пар сил
(x* -y* )
| ||
|
|
| x | y | ||
|
| P*cos(α+γ) | -P*sin(α+γ) | g | -B | -g*Psin(α+γ)+B*Pcos(α+γ) |
|
| Q*cos(β-90) | -Q*sin(β-90) | -(c-m+2*d*cos60) | b-2*d*sin60-B | Q*sin(β-90)*(c-m+2*d*cos60)-Q*cos(β-90)*(b-2*d*sin60-B) |
|
| - | - | - | - | -M |
|
|
| -c | -B | -B*Ha | |
|
|
| -c | -B | -c*Va | |
|
| *cos(90-γ)
| *sin(90-γ)
| 
|
-g*Psin(α+γ)+B*Pcos(α+γ)+ Q*sin(β-90)*(c-m+2*d*cos60))- Q*cos(β-90)*(b-2*d*sin60-B) –M -B*Ha -c*Va = -2*3500*0,998 + 1,04*3500*0,05 + 3000*0,5*2,35 -3000*0,86*0,114 – 4000 – 1,04*7940+ 3*5263,3 = -6986 + 182 + 3525 – 258 – 4000 – 8258 + 15790 = - 5 (H)
|
|
|
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 704; Нарушение авторских прав?; Мы поможем в написании вашей работы!