КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
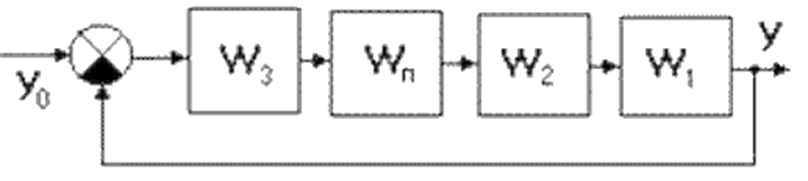
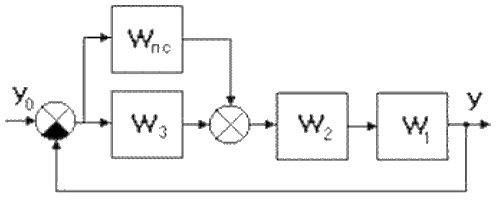
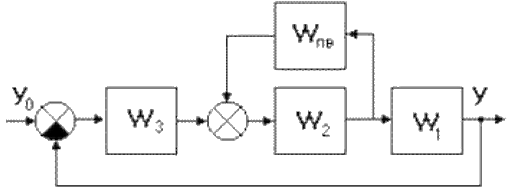
З наведених структурних схем визначити блок схему автоматичного керування по збуренню 3 страница
|
|
|
|

+ 
203. Збільшення аргументу функції, згідно принципу аргументу залежить від таких параметрів
кількість змінних
+ порядок полінома
+ кількість лівих коренів
+ кількість правих коренів
знак функції
порядок розташування коренів
204. Годограф Михайлова стійкої системи четвертого порядку завершується при  в такій чверті комплексної площини
в такій чверті комплексної площини
першій
другій
третій
+ четвертій
205. Годограф Михайлова стійкої системи третього порядку завершується за у такій чверті комплексної площини:
першій
другій
+ третій
четвертій
206. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система …
+ стійка
нестійка
на межі стійкості
неможливо визначити
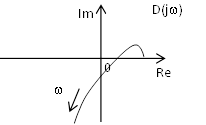
207. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система …
стійка
+ нестійка
на межі стійкості
неможливо визначити
208. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система
стійка
нестійка
+ на межі стійкості
неможливо визначити
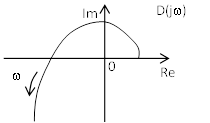
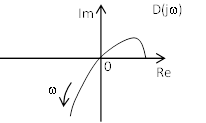
209. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система
+ стійка
нестійка
на межі стійкості
неможливо визначити
210. Годограф Михайлова D(jω) для системи четвертого порядку зображено на рисунку. Така система
+ стійка
нестійка
на межі стійкості
неможливо визначити
211. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
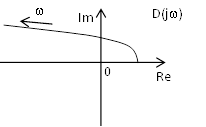
212. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система
стійка
+ нестійка
|
|
|
на межі стійкості
неможливо визначити
213. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
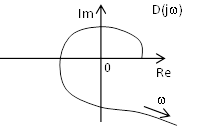
214. Годограф Михайлова D(jω) для системи четвертого порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
215. Стійка система третього порядку має такий годограф Михайлова D(jω)
1.
2. +
3.
4.
216. Стійка система четвертого порядку має такий годограф Михайлова D(jω)
1.
2.
3.+
4.
217. Критерій стійкості Найквіста дозволяє визначити стійкість …
замкненої системи за її АФЧХ
+ замкненої системи за АФЧХ розімкненої
розімкненої системи за АФЧХ замкненої
розімкненої системи за її АФЧХ
218. Які координати має критична для стійкості точка на комплексній площині, яку не повинна охоплювати АФЧХ розімкненої системи згідно з критерієм Найквіста:
(0; j1)
(0; -j1)
+ (-1; j0)
(1; j0)
219. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
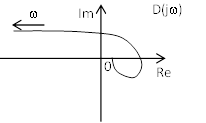
220. АФЧХ розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
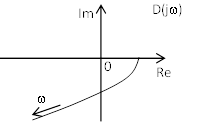
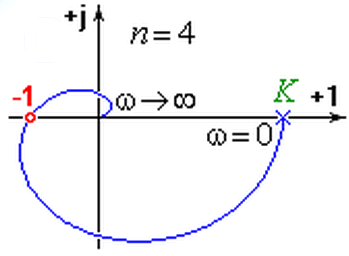
221. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
|
|
|
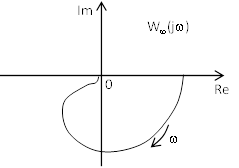
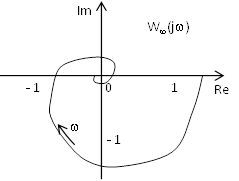
222. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
Система буде стійкою після замикання
+ Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
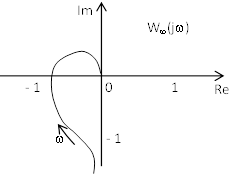
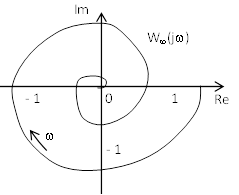
223. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
Система буде стійкою після замикання
Система буде нестійкою після замикання
+ Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
224. З представлених АФЧХ стійких розімкнених систем виберіть ті, які будуть нестійкими в замкненому стані:
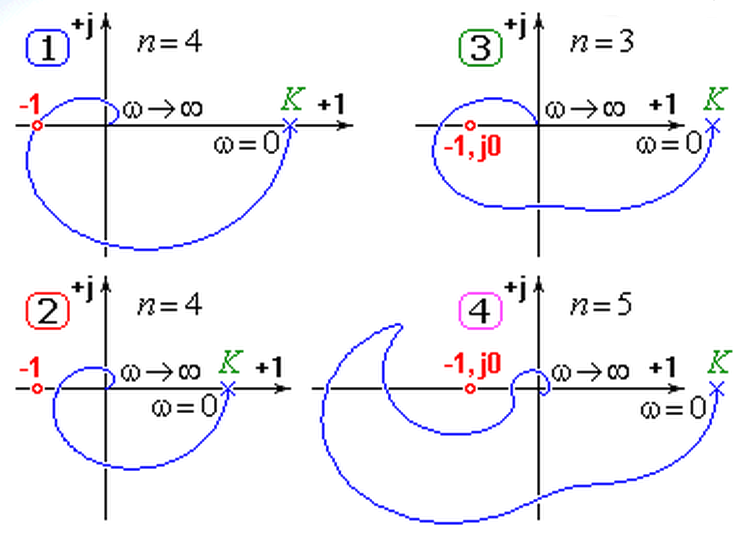
Система №1
Система №2
+ Система №3
Система №4
225. Логарифмічнй крітерій стійкості дозволяє визначити стійкість:
замкненої системи за її ЛАЧХ та ЛФЧХ
+ замкненої системи за ЛАЧХ та ЛФЧХрозімкненої
розімкненої системи за ЛАЧХ та ЛФЧХ замкненоїї
розімкненої системи за її ЛАЧХ та ЛФЧХ
226. На рисунку позначено:
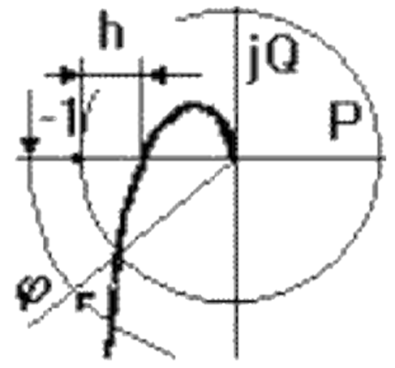
h – запас стійкості за фазою,  – запас стійкості зао амплітудою;
– запас стійкості зао амплітудою;
h – висота амплітуди,  – запізнювання за фазою;
– запізнювання за фазою;
h – амплітудна відстань, 6. – фазовий зсув;
+ h – запас стійкості за амплітудіою, – запас стійкості за фазою.
227. Згідно з критерієм Найквиста, чим далі графік АФЧХ від точки
(-1, j0), тим запас стійкості:
менше
слабше
+ більше
потужніше
228. Згідно з критерієм Найквиста, чим ближче проходить графік АФЧХ від точки (-1, j0), тим запас стійкості:
+ менше
слабше
більше
потужніше
229. Запас стійкості за модулем визначається відстанню від критичної точки до точки перетинання годографом:
одиничного кола
+ осі абсцис
осі ординат
проміня під кутом
230. Запас стійкості за фазою визначається кутом між ______________ і променем, проведеним з початку координат у точку перетину годографа з одиничним колом:
+ від’ємним напрямом дійснної осі
додатнім напрямом дійснної осі
від’ємним напрямом уявної осі
додатнім напрямом уявної осі
231. Для забезпечення вказаних запасів стійкості h та для системи, її АФЧХ у розімкненому стані повинна …
|
|
|
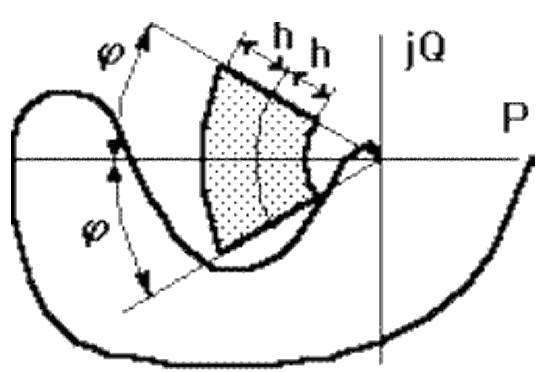
торкатися заштрихованої області
пересікати заштриховану область
ділити заштриховану область навпіл
+ не пересікати заштриховану область
232. Як впливає присутність ланки чистого запізнення в системі на її стійкість?
не впливає
покращує стійкість
+ погіршує стійкість
233. Як впливає присутність ланки чистого запізнення в системі на її АЧХ?
збільшує амплітуду
зменшує амплітуду
+ не впливає
234. Як впливає присутність ланки чистого запізнення в системі на її запас за фазою?
збільшує запас за фазою
+ зменшує запас за фазою
не впливає
235. Як впливає підвищення коефіцієнта підсилення системи на її запаси стійкості?
збільшує
+ зменшує
не впливає
236. Як впливає підвищення порядку астатизму системи на її запаси стійкості?
збільшує
+ зменшує
не впливає
237. D-розбиття використовується для …
+ побудови областей стійкості системи
підвищення точності системи на низьких частотах
розрахунку показників якості системи
+дослідження впливу параметрів на стійкість системи
+контролю допустимого діапазону зміни параметрів
підвищення швидкодії системи
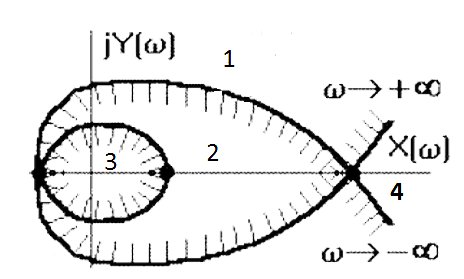
238. Укажіть номер області-претендента для D-розбиття за одним параметром:
1.
2.
+3.
4.
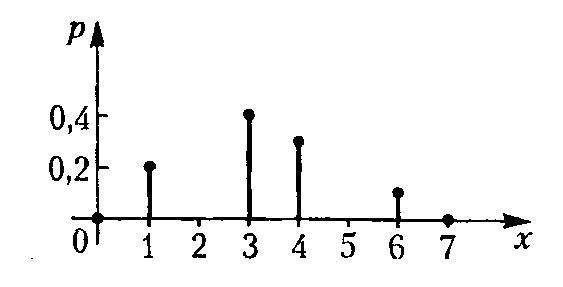
239. Усталене значення вихідного сигналу для системи  дорівнюватиме:
дорівнюватиме:
+ 2,5
0,4
240. Усталене значення вихідного сигналу для системи  дорівнюватиме:
дорівнюватиме:
+ 5
2,5
0,4
241. Усталене значення вихідного сигналу для системи  дорівнюватиме
дорівнюватиме
+ 3
0,6
0,3
242. Яких методів побудови перехідних процесів САР не існує?
Метод трапецій і трикутників
Рішення діференціальних рівнянь стану системи
Метод зворотного перетворення Лапласа
+ Метод мінімальних квадратів
243. В якому методі для побудови перехідних процесів САР використовується дійсна частотна характеристика?
+ Метод трапецій і трикутників
Рішення диференціальних рівнянь стану системи
Метод зворотного перетворення Лапласа
Метод мінімальних квадратів
244. Яких показників якості систем автоматичного керування не існує?
Кореневих
+ Амплітудних
|
|
|
Інтегральних
Частотних
245. На рисунку поз. 3 позначено:
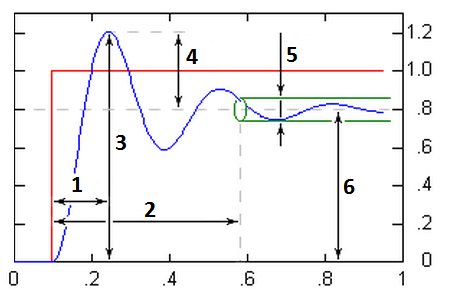
+ ymax
tmax
σmax
ууст
246. На рисунку поз. 4 позначено:
ymax
tmax
+ σmax
ууст
247. На рисунку поз. 6 позначено:
ymax
tmax
σmax
+ ууст
248. На рисунку поз. 2 позначено:
+ час регулювання
перерегулювання
5% трубка
усталене значення виходу
249. На рисунку поз. 5 позначено:
час регулювання
перерегулювання
+ 5% трубка
усталене значення виходу
250. На рисунку перерегулювання позначено номером позиції:
+4
251. На рисунку час регулювання позначено номером позиції:
+2
252. На рисунку усталене значення вихідного сигналу позначено номером позиції:
+6
253. Перерегулювання може бути обчислене за графіком за формулою:
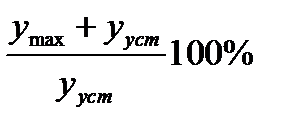
+ 
254. Перерегулювання σ відносять до показників якості:
+ прямих
кореневих
частотних
інтегральних
255. Час регулювання відносять до показників якості:
+ прямих
кореневих
частотних
інтегральних
256. Статичну похибку εст = х - ууст відносять до показників якості:
+ прямих
кореневих
частотних
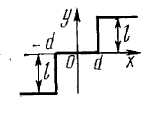
інтегральних
257. Показник  відносять до ___________ показників якості:
відносять до ___________ показників якості:
прямих
кореневих
частотних
+ інтегральних
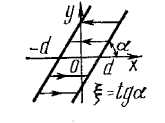
258. Якою літерою на рисунку позначено кореневий показник якості – степінь стійкості?
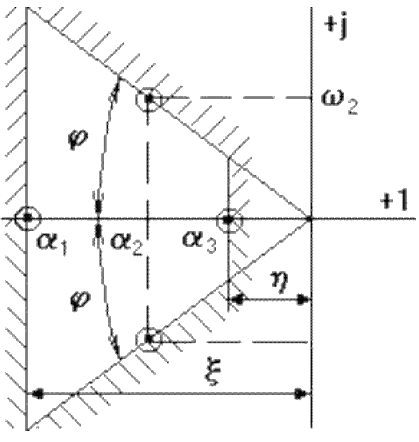
+ η
ξ
α3
259. Максимальне припустиме відхилення Δ для визначення часу регулювання визначається за формулою:
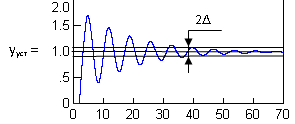
+ Δ=0,05yуст
Δ=0,05ymax
Δ=0,95
Δ=0,05ymin
260. За якою з точок за графіком АЧХ визначається показник якості – полоса пропускання?
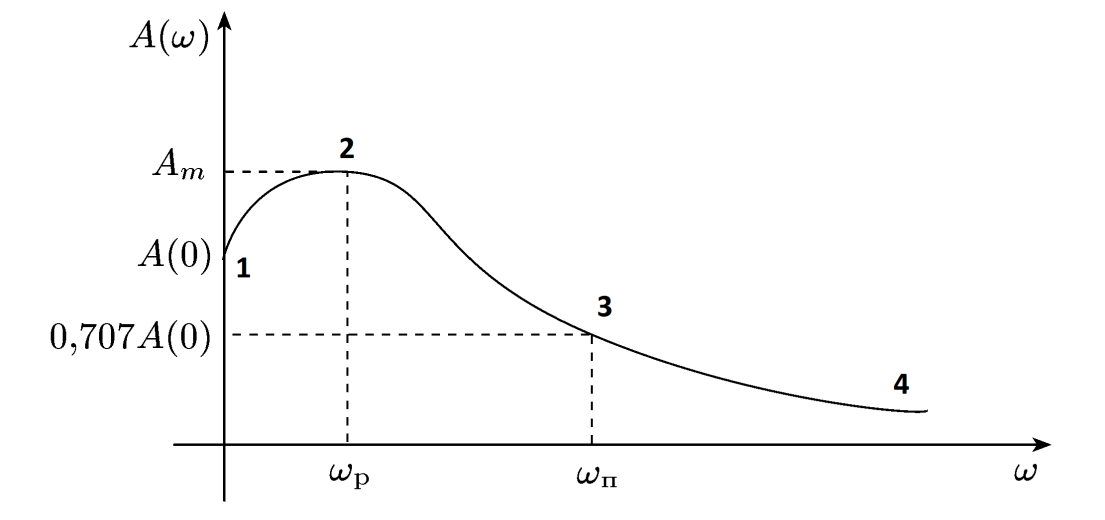
1.
2.
+3.
4.
261. За якою з точок за графіком АЧХ визначається показник коливальності системи?
1.
+2.
3.
4.
262. Коефіцієнти похибок використовуються для оцінювання __________ системи:
стійкості
надійності
+ точності
коливальності
263. Знайдіть відповідність законів регулювання та їх передатних функцій.
 П
П
 ПІ
ПІ
 ПД
ПД
 ПІД
ПІД
264. При використанні пропорційного закону регулювання підвищення коефіцієнту призводить до …
+ підвищення точності системи
підвищення швидкодії системи
покращення перехідного процесу
підвищення запасу стійкості
265. Використання інтегрального закону регулювання призводить до …
+ підвищення точності системи
підвищення швидкодії системи
покращення перехідного процесу
підвищення запасу стійкості
266. Використання диференціального закону регулювання призводить до …
підвищення точності системи
+ підвищення швидкодії системи
покращення перехідного процесу
зменшення запасу стійкості
267. Укажіть відповідність схем вмикання коректуючих ланок W в систему та їх назв.
 послідовне
послідовне
 паралельне
паралельне
 зворотній зв’язок
зворотній зв’язок
268. Ймовірність випадкової події може змінюватись в межах:

+ 
269. Як пов’язані між собою ймовірності протилежних подій p та q?
p=q
p=-q
p =1/ q
+ p =1- q
270. В теорії ймовірності середнє значення випадкової величини називають:
дисперсією
+ математичним сподіванням
кореляцією
центральним моментом
271. Середній квадрат відхилення випадкової величини від її середнього значення називається …
+ дисперсія
математичне сподівання
кореляція
центральний момент
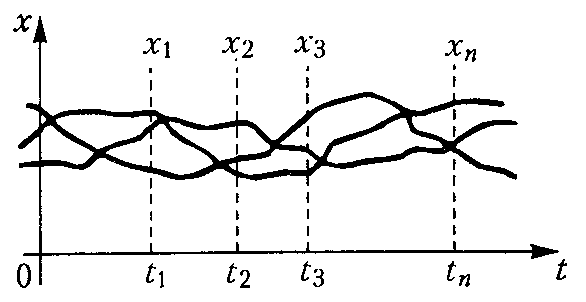
272. Випадковим процесом називається така випадкова величина, яка …
не змінюється з часом t
+ змінюється з часом t
не залежить від стану системи
залежить від зовнішніх сигналів
273. На якому з малюнків зображено безперервний випадковий процес?
| 
| |
| 1+. | 2. | |
| 
| |
| 3. | 4. | |
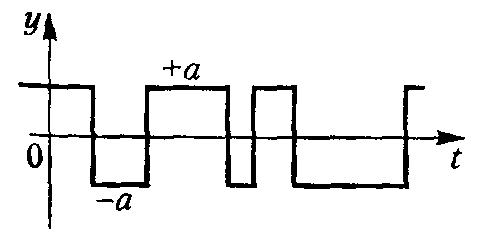
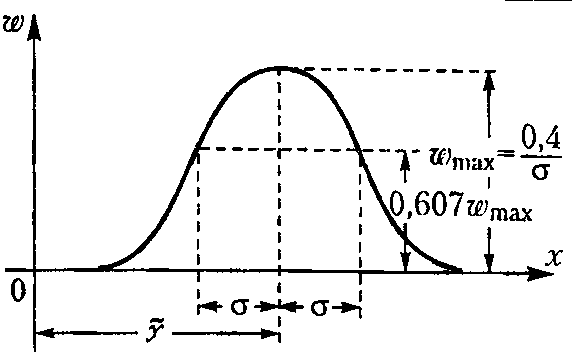
274. "Білим шумом" називається випадковий процес, який має ______ спектральної щільності в діапазоні частот від  до
до  .
.
+ однакове значення
нульове значення
куполоподібний розподіл
лінійний розподіл
275. Чи правильним є твердження: до нелінійних систем автоматичного керування відносять такі, які описуються нелінійними диференціальними рівняннями.
+так; ні
276. Для дослідження нелінійних систем автоматичного керування використовують ___________ методи дослідження.
прямі;
точні;
+ наближені;
непрямі
277. Чи правильним є твердження: нелінійні елементи поділяють на дві групи – це гладкі несуттєві та істотні.
+так; ні
278. Чи правильним є твердження: істотні нелінійні елементи поділяють на три групи – це сумлінні, однозначні та неоднозначні.
так + ні
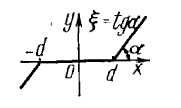
279. Визначити вид нелінійності за статичною характеристикою:

| + зона насичення зона нечутливості зона насичення та нечутливості ідеальне двопозиційне реле |
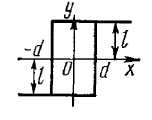
280. Визначити вид нелінійності за статичною характеристикою:
| зона насичення + зона нечутливості зона насичення та нечутливості ідеальне двопозиційне реле |
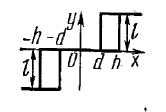
281. Визначити вид нелінійності за статичною характеристикою:
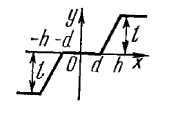
| зона насичення зона нечутливості + зона насичення та нечутливості ідеальне двопозиційне реле |
282. Визначити вид нелінійності за статичною характеристикою:
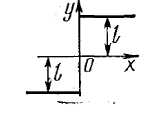
| зона насичення зона нечутливості зона насичення та нечутливості + ідеальне двопозиційне реле |
283. Визначити вид нелінійності за статичною характеристикою:
| + ідеальне реле із зоною нечутливості двопозиційне реле трипозиційне реле люфт |
284. Визначити вид нелінійності за статичною характеристикою:
| ідеальне реле із зоною нечутливості + двопозиційне реле трипозиційне реле люфт |
285. Визначити вид нелінійності за статичною характеристикою:
| ідеальне реле із зоною нечутливості двопозиційне реле + трипозиційне реле люфт |
286. Визначити вид нелінійності за статичною характеристикою:
| ідеальне реле із зоною нечутливості двопозиційне реле трипозиційне реле + люфт |
287. Для дослідження нелінійних систем автоматичного керування існують такі наближені методи:
критерій Михайлова
+ метод фазової площини;
критерій Гурвіца
+ метод припасовування;
критерій Рауса
+ метод гармонічної лінеаризації;
288. Чи правильним є твердження: статична характеристика електричного підсилювача автоматики може бути представлена як зона нечутливості.
так; + ні;
289. Чи правильним є твердження: статична характеристика механічного підсилювача автоматики може бути представлена як ідеальне двопозіційне реле.
так; + ні;
290. Чи правильним є твердження: характер руху нелінійних систем автоматичного керування залежить від початкових умов
+так;
ні;
немає значення
291. Чи правильним є твердження: метод гармонійної лінеаризації для дослідження нелінійних САК раціонально застосовувати тільки в тому випадку, коли в усталеному процесі система автоматичного керування робить автоколивання.
+так;
ні;
неповна відповідь
292. Чи правильним є твердження: метод гармонійної лінеаризації для дослідження нелінійних САК є точний метод.
так; + ні;
293. Чи правильним є твердження: метод припасовування полягає у тому, що рівняння руху нелінійної САК розбивається на ряд лінійних рівнянь які відповідають деяким ділянкам руху системи.
+так;
ні;
неповна відповідь
294. Чи правильним є твердження: метод припасовування використовується тільки для кусково-лінійних статичних нелінійностей.
+так;
ні;
неповна відповідь
295. Чи правильним є твердження: метод припасовування використовується тільки для істотних неоднозначних нелінійностей.
+так;
ні;
неповна відповідь
296. Чи правильним є твердження: метод фазової площини – це метод аналітичного розв`язку нелінійних диференціальних рівнянь.
так;
+ ні;
неповна відповідь
297. Чи правильним є твердження: метод фазової площини використовується для дослідження нелінійних САК, у яких лінійна частина з задовільненою точністю може бути представлена диференціальним рівнянням другого порядку.
+так;
ні;
неповна відповідь
298. Чи правильним є твердження: метод фазової площини використовується для дослідження нелінійних САК, у яких лінійна частина із задовільненою точністю може бути представлена диференціальним рівнянням будь-якого порядку.
так;
+ ні;
неповна відповідь
299. Чи правильним є твердження: фазова площина або площина стану – це площина, на якій зображується зміна будь-якої величини та її похідної.
+так;
ні;
неповна відповідь
300. Частотний метод Попова дозволяє досліджувати абсолютну стійкість нелінійної системи керування з ___________.
будь-якою нелінійністю в прямої гілки
обмеженим числом нелінійностей
+ одною однозначною статичною нелінійністю
будь-якою нелінійністю в гілки зворотного зв'язку
301. Чи правильним є твердження: абсолютна стійкість нелінійної системи керування – це стійкість загалом за будь-якої форми нелінійності.
+ так; ні
302. Чи правильним є твердженняження: метод послідовних наближень дозволяє знайти розв`язок диференціального рівняння або системи рівнянь будь якого порядку, що задовольняє умови існування і єдності.
+так; ні;
303. Чи правильним є твердження: під час визначення якості перехідного процесу нелінійних систем автоматичного керування оцінювання відбувається аналогічно як і для лінійної системи, але з урахуванням величини зовнішнього впливу.
+так; ні;
|
|
|
|
|
Дата добавления: 2015-06-26; Просмотров: 5227; Нарушение авторских прав?; Мы поможем в написании вашей работы!