КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Связи и их реакции. Принцип освобождаемости от связей
|
|
|
|
Рассмотрим примеры воздействий одних тел на другие тела. Эти примеры познакомят нас с различными видами связей, которые используются при закреплении тел в реальных конструкциях.
На Рис.1 показано тело, подвешенное на нерастяжимой нити. Это тело несвободно, на него наложена связь в виде нерастяжимой нити. Активная сила тяжести  стремится сместить тело вниз по вертикали. При этом возникает сила
стремится сместить тело вниз по вертикали. При этом возникает сила  реакции связи, которую называют натяжением нити. Она парирует (уравновешивает) активную силу .
реакции связи, которую называют натяжением нити. Она парирует (уравновешивает) активную силу .
 Из этого примера видно, что реакция связи всегда противоположна тому направлению, в котором связь ограничивает перемещение тела.
Из этого примера видно, что реакция связи всегда противоположна тому направлению, в котором связь ограничивает перемещение тела.
На Рис.2 тело 1, лежит на опорном теле 2 и удерживается
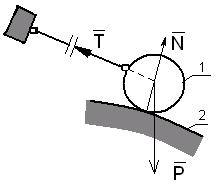 нерастяжимой нитью. Точка соприкосновения тел 1 и 2 не может перемещаться по нормали к опорной поверхности внутрь тела 2. Рис.1. Тело, подвешенное на нерастяжимой нити. Следовательно, если мысленно отбросить связь 2, к телу 1 в точке соприкосновения тел следует приложить реакцию
нерастяжимой нитью. Точка соприкосновения тел 1 и 2 не может перемещаться по нормали к опорной поверхности внутрь тела 2. Рис.1. Тело, подвешенное на нерастяжимой нити. Следовательно, если мысленно отбросить связь 2, к телу 1 в точке соприкосновения тел следует приложить реакцию  этой связи. Именно эта сила противодействует проникновениютела 1 внутрьтела 2. Рассекая мысленно нить и отбрасывая верхнюю её часть, мы должныприложить к телу силу натяжения , которая не допускает смещениятела 1 вдоль нити.
этой связи. Именно эта сила противодействует проникновениютела 1 внутрьтела 2. Рассекая мысленно нить и отбрасывая верхнюю её часть, мы должныприложить к телу силу натяжения , которая не допускает смещениятела 1 вдоль нити.
На Рис.1-3 - сила тяжести. В целях экономии времени и места в дальнейшем будем показывать
 реакции связей Рис.2. Связи в виде опорного тела 2 и нерастяжимой нити на исходных рисунках, (как на Рис.2), мысленно полагая связи уже отброшенными.
реакции связей Рис.2. Связи в виде опорного тела 2 и нерастяжимой нити на исходных рисунках, (как на Рис.2), мысленно полагая связи уже отброшенными.
Если соприкосновение тел осуществляется в угловых точках, как на Рис.3, то реакция связи направляется по нормали к поверхности того тела, для которого эта нормаль в данной точке существует. В опорных точках B и D реакции  и
и  расположены на нормалях к опорной поверхности, а в точке E- реакция
расположены на нормалях к опорной поверхности, а в точке E- реакция
|
|
|
 перпендикулярна поверхности стержня.
перпендикулярна поверхности стержня.
Во всех рассмотренных случаях
Рис.3. Соприкосновение тел в угловых точках соприкасающиеся поверхности предполагаются идеально гладкими (силы трения отсутствуют).
 На Рис.4показан стержень
На Рис.4показан стержень
АВ, закреплённый по концам на опорном теле, (которое выделено заливкой) с помощью неподвижного (вточке A) и подвижного – (в точке B) цилиндрических шарниров. Заданная сила  стремится сдвинуть точку A и тело AB Рис.4. Закрепление тела с помощью цилиндрических в горизонтальном и в вертикальном направлениях. шарниров
стремится сдвинуть точку A и тело AB Рис.4. Закрепление тела с помощью цилиндрических в горизонтальном и в вертикальном направлениях. шарниров
Однако при таком закреплении указанные смещенияневозможны. Поэтому в точке А на стержень должны действовать реакции  опорного тела, парирующие действие активной силы , причёмгоризонтальнаяреакция
опорного тела, парирующие действие активной силы , причёмгоризонтальнаяреакция  парирует смещениеточки Ав горизонтальном направлении, а сила
парирует смещениеточки Ав горизонтальном направлении, а сила  - в вертикальном направлении.
- в вертикальном направлении.
Точка B не может перемещаться по нормали внутрь опорной наклонной плоскости.Запрет на перемещениеточки Вв указанном направленииреализует реакция  ,
,
с которойопорное тело действует на точку B стержня.
Для исключения температурных напряжений в теле АВ, которые могут возникнуть при изменении температуры окружающей среды, предусмотрена возможность смещения точки В параллельно наклонной опорной плоскости.
В рассмотренном примере механическое взаимодействие тела АВ с опорным телом определяется силами и .
 Конструкция цилиндрических шарниров такова, что тело АВ может беспрепятственно и поворачиваться вокруг оси каждого шарнира (эти оси перпендикулярны плоскости чертежа и проходят через точки А и В), поэтому моментные воздействия опорного тела на стержень АВ отсутствуют.
Конструкция цилиндрических шарниров такова, что тело АВ может беспрепятственно и поворачиваться вокруг оси каждого шарнира (эти оси перпендикулярны плоскости чертежа и проходят через точки А и В), поэтому моментные воздействия опорного тела на стержень АВ отсутствуют.
Тело, закреплённое в подшипниках, показано на Рис.5. Протяжённость опор будем предполагать малой по сравнению с длиной АВ, поэтому опоры считаются точечными. Подшипник в опоре А устроен так, что точка А тела остаётся неподвижной несмотря на действие активных сил и  . Неподвижность точки А обеспечивается реакциями и
. Неподвижность точки А обеспечивается реакциями и  , Рис.5. Закрепление тела в подшипниках
, Рис.5. Закрепление тела в подшипниках
|
|
|
с которыми опорное тело воздействует на эту точку закреплённого тела.
Конструкция подшипника в опоре В отличается от конструкции подшипника
в опоре А. Подшипник В допускает скольжение вала вдоль оси АВ, например, при изменении температуры тела. Но перемещение точки В в других направлениях (на нас - от нас и вверх- вниз) невозможно. Это обеспечивается реакциями  опорного тела.
опорного тела.
 Тело, закреплённое в подшипниках, может беспрепятственно поворачиваться (вращаться) вокруг оси АВ.
Тело, закреплённое в подшипниках, может беспрепятственно поворачиваться (вращаться) вокруг оси АВ.
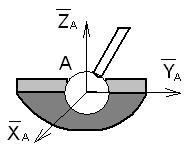
Другой пример конструкции опоры тела показан на Рис.6. Такая опора называется шаровым или сферическим шарниром. Концевая точка закрепляемого тела выполняется в виде шарика, который укладывается в сферическую расточку в опорном теле, и сверху фиксируется планкой. Центр шарика, точка А, не может при таком закреплении перемещаться ни в одном из трёх взаимно
Рис.6. Шаровой или сферический шарнир
перпендикулярных направлений. Запрет на перемещения точки А обеспечивается тремя реакциямисвязи (опорного тела): и . Вместе с тем, любые повороты тела вокруг точки А могут быть свободно реализованы, поэтому собственно моменты в составе реакций отсутствуют.
Рассмотрим способ закрепления тела,
называемый жёсткой заделкой, Рис.7. 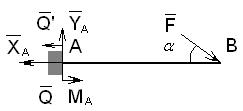
В этом случае один конец стержня (балки) либо замурован в жёсткую стену, либо приварен к ней. При таком закреплении невозможны перемещения стержня АВ в горизонтальном
и в вертикальном направлениях, что обеспечивается реакциями стены . Рис.7. Жёсткая заделка
Жёсткая заделка исключает также возможность поворота стержня вокруг
точки А. Невозможность указанного поворота может быть обеспечена только парой сил  , , момент которой обозначен
, , момент которой обозначен  , Рис 7. Силы и пара сил , действующие на стержень АВ, возникают в результате его механического взаимодействия со стеной. Здесь в качестве точки приведения выбрана точка А.
, Рис 7. Силы и пара сил , действующие на стержень АВ, возникают в результате его механического взаимодействия со стеной. Здесь в качестве точки приведения выбрана точка А.
Жёсткая заделка может применяться и в случае пространственного (неплоского) нагружения закреплённого тела.
Рассмотренный пример показывает, что в общем случае воздействие одного тела на другое характеризуется силой ( ) и собственно моментом, который можно представить в виде пары сил.
) и собственно моментом, который можно представить в виде пары сил.
|
|
|
Упражнение 2.1.
1. Представьте жёсткую заделку в виде комбинации
- двух разнесённых точечных опор на вершины треугольных призм;
- неподвижного шарнира и точечной опоры на вершину треугольной призмы.
 2. Мысленно разделите стержень АВ вертикальной плоскостью в любом месте между концевыми сечениями А и В на две части, Рис.7. Левую часть освободите от связи (стены). Нарисуйте силовые схемы для выделенных таким образом левой и правой частей тела АВ.
2. Мысленно разделите стержень АВ вертикальной плоскостью в любом месте между концевыми сечениями А и В на две части, Рис.7. Левую часть освободите от связи (стены). Нарисуйте силовые схемы для выделенных таким образом левой и правой частей тела АВ.
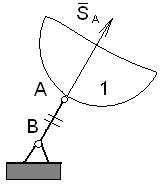
В некоторых случаях в качестве связи используется лёгкий недеформируемый стержень. На Рис.8 показан фрагмент некоторого тела 1, опирающегося в точке А на такой стержень АВ. Другие опоры тела не показаны. Предполагается, что на тело 1 действуют заданные силы, которые также не показаны на рисунке. Так как стержень недеформируем, то смещение точки А тела в любом направлении вдоль оси стержня невозможны. Следовательно, если мысленно отсечь нижнюю часть АВ, то к телу в точке А должна быть приложена реакция  , направленная обязательно вдоль оси стержня. Если силы, действующие на тело 1, прижимают его Рис.8. Опора тела на жёсткий кстержню, то сила направлена вдоль АВ стержня вверх. невесомый стержень
, направленная обязательно вдоль оси стержня. Если силы, действующие на тело 1, прижимают его Рис.8. Опора тела на жёсткий кстержню, то сила направлена вдоль АВ стержня вверх. невесомый стержень
Упражнение 2.2.
Выделите из системы стержень АВ, Рис. 8, и покажите действующие на него силы, предполагая в точках А и В цилиндрические или сферические шарниры. Как изменится силовая схема, если на стержень между точками А и В будет действовать некоторая сила, не лежащая на оси стержня?
В качестве ещё одного примера
рассмотрим взаимодействие Земли с Солнцем. Земля сплюснута у полюсов и имеет форму, близкую к сфероиду (эллипсоиду вращения). Ось вращения Земли наклонена к плоскости земной орбиты под углом  . В соответствии с первым законом Кеплера, Земля движется вокруг Солнца по эллиптической орбите, в одном из фокусов которой находится Солнце. Нешаровая форма Земли, наклон её оси к плоскости орбиты приводят к тому, что силы притяжения Земли Солнцем оказываются эквивалентными силе и паре сил. Здесь учитывается также различная удалённость частиц Земли от Солнца и, следовательно, различные значения сил тяготения для разных частиц Земли. Указанные обстоятельства в итоге приводят к тому, что суммарное воздействие Солнца на Землю сводится к силе и паре сил.
. В соответствии с первым законом Кеплера, Земля движется вокруг Солнца по эллиптической орбите, в одном из фокусов которой находится Солнце. Нешаровая форма Земли, наклон её оси к плоскости орбиты приводят к тому, что силы притяжения Земли Солнцем оказываются эквивалентными силе и паре сил. Здесь учитывается также различная удалённость частиц Земли от Солнца и, следовательно, различные значения сил тяготения для разных частиц Земли. Указанные обстоятельства в итоге приводят к тому, что суммарное воздействие Солнца на Землю сводится к силе и паре сил.
|
|
|
Следствием действия на Землю силы притяжения к Солнцу является движение Земли вокруг Солнца по эллиптической траектории. Силы притяжения к Луне и к Солнцу также создают на Земле приливы и отливы.
Действие на Землю пары сил тяготения приводит к медленной прецессии земной оси и к явлению, которое в астрономии называют предварением равноденствий
(А.В. Бялко. Наша планета Земля. Библиотечка “Квант”, выпуск 29. М., 1983).
В результате прецессионного движения земная ось описывает коническую поверхность с вершиной в центре Земли. Полный оборот в этом движении земная ось делает примерно за 26000 лет.
Обратим внимание на то, что для любого воздействия на тело всегда можно указать другое тело - источник этого воздействия.
Мы рассмотрели примеры воздействий жёстких связей на тела, сдвиги и повороты которых “запрещались” наложенными на них указанными жёсткими связями. Приведём иные примеры, когда связи податливые. Такие связи допускают сдвиг или поворот тел, на которые они наложены. Ещё раз убедимсяв том, что сила,
 с которой некоторое тело В действует на тело А- это реакция тела Вна поступательное смещение тела А, а пара сил- это реакция тела В на поворот тела А.
с которой некоторое тело В действует на тело А- это реакция тела Вна поступательное смещение тела А, а пара сил- это реакция тела В на поворот тела А.
На Рис.9 показано тело А, лежащее на гладкой горизонтальной плоскости и прикреплённое к упругой связи (пружине) В, естественная длина которой равна  . Приложим к телу А такую силу , чтобы оно сместилось на величину x. При этом пружина удлинится на ту же величину, и возникнет упругая сила , приложенная к телу А - реакция связи В на смещение тела А.
. Приложим к телу А такую силу , чтобы оно сместилось на величину x. При этом пружина удлинится на ту же величину, и возникнет упругая сила , приложенная к телу А - реакция связи В на смещение тела А.
Рис.9. Упругая сила , в озникающая при смещении тела А При относительно небольших смещениях тела упругая сила пропорциональна изменению естественной длины пружины.
 Силы и на Рис.9 - соответственно вес тела А и нормальная реакция опорного тела.
Силы и на Рис.9 - соответственно вес тела А и нормальная реакция опорного тела.
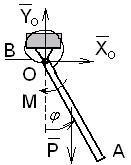
На Рис.10 показан стержень ОА, закреплённый на горизонтальной оси с помощью подшипника (или цилиндрического шарнира). Стержень связан со спиральной пружиной В. При вертикальном положении стержня пружина недеформирована.Поворот стержня на угол  приводит к закручиванию спиральной пружины и к возникновению пары сил с моментом
приводит к закручиванию спиральной пружины и к возникновению пары сил с моментом  . Этот момент, пропорциональный углу закручивания пружины и оказывающий сопротивление
. Этот момент, пропорциональный углу закручивания пружины и оказывающий сопротивление
повороту стержня, есть реакция спиральной Рис.10. Стержень ОА,
пружины В на этот его поворот соединённый со спиральной Силы  ,
,  на Рис.10 – это действующие пружиной В
на Рис.10 – это действующие пружиной В
на стержень реакции опорного тела; - вес стержня А.
При движении тела в сплошной среде (например, в воде или в воздухе) на него действуют силы сопротивления среды. При взаимном движении одного тела по поверхности другого тела (или при попытке совершения такого движения) возникает взаимное сопротивление тел таким движениям в виде сил внешнего трения.
Рассмотренные примеры показывают, что понятие воздействия одного тела на другое эквивалентно принципу освобождаемости от связей, который формулируется так: ”Всякое несвободное тело можно считать свободным, если мысленно отбросить наложенные на него связи, а их действие на тело заменить воздействиями, которые называются реакциями связей”.
3. Сосредоточенные и распределённые силовые воздействия.
Силовые воздействия на тело могут быть сосредоточенными и распределёнными. Сосредоточенная сила характеризуется модулем, направлением и точкой приложения. Точки приложения активных сил и реакций связей относятся к исходным данным, определяя нагрузку на конструкцию и способ закрепления последней на опорном теле. В дальнейшем, при определении реакций связей, вектор силы считается свободным, а не
скользящим вектором.
 Распределённые силовые воздействия на тело могут быть распределены по линии,по площади и по объёму. Рис.11. Равномерно распределённая силовая нагрузка Так вес тонкой проволоки можно считать распределённым вдоль её осевой линии.Давление однородного цилиндра на горизонтальную плоскость распределено равномерно по образующей цилиндра, соприкасающейся с опорной плоскостью, Рис.11. Равномерно распределённаянагрузка характеризуется
Распределённые силовые воздействия на тело могут быть распределены по линии,по площади и по объёму. Рис.11. Равномерно распределённая силовая нагрузка Так вес тонкой проволоки можно считать распределённым вдоль её осевой линии.Давление однородного цилиндра на горизонтальную плоскость распределено равномерно по образующей цилиндра, соприкасающейся с опорной плоскостью, Рис.11. Равномерно распределённаянагрузка характеризуется
интенсивностью  , измеряемой в
, измеряемой в  ; -любая ординатана эпюре нагрузки.
; -любая ординатана эпюре нагрузки.
Интенсивность нагрузки, показанной Рис.12. Силовое воздействие, переменна, она изменяется по линейному распределённое по линейному закону закону. Максимальное значение интенсивности обозначено  .
.
 Силовое воздействие на тело может быть
Силовое воздействие на тело может быть
распределено по его поверхности. На Рис. 13
показано давление воды на смоченную поверхность корабля.
Вес тонкой оболочки также можно считатьраспределённым по её срединной поверхности.
Интенсивность силового воздействия на тело, распределённого по поверхности, будем обозначать  . Рис.13. Силовая нагрузка,
. Рис.13. Силовая нагрузка,
Её размерность -  . Вес тела распределён по его распределённая по поверхности объёму. По объёму тела распределены и так называемые силы инерции, о которых речь пойдёт в разделе “ Динамика ”. Интенсивность объёмной нагрузки
. Вес тела распределён по его распределённая по поверхности объёму. По объёму тела распределены и так называемые силы инерции, о которых речь пойдёт в разделе “ Динамика ”. Интенсивность объёмной нагрузки
на тело будем обозначать  ,
,
её размерность -  .
.
Можно представить и распределённые пары сил.Однако здесь такие распределённые моментные воздействия не рассматриваются.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2940; Нарушение авторских прав?; Мы поможем в написании вашей работы!