КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведення довільної просторової системи сил до однієї сили та однієї пари сил
|
|
|
|
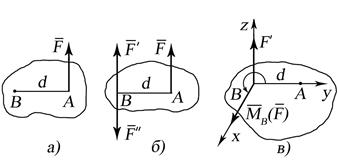
Теорема про паралельне перенесення сили
Просторова довільна система сил
(теорема Пуансо)
Дія сили на тверде тіло не зміниться, якщо її перенести паралельно самій собі в будь-яку іншу точку, приклавши при цьому пару сил з моментом, рівним моменту перенесеної сили відносно тієї точки, у яку переноситься сила (рис. 8.1 а, б, в):
 (8.1)
(8.1)


Якщо лінії дії сил даної системи розташовані в різних площинах, не перетинаються в одній точці та не паралельні між собою, то така система сил називається довільною просторовою системою сил.
Задача про приведення довільної просторової системи сил до однієї сили та пари сил розв'язується за допомогою теореми про паралельне перенесення сил.
Точка О, в якій прикладені сили, називається центром зведення (приведення).
Приведені до центра зведення О сили можна скласти за правилом паралелограма або силового многокутника, та, отже, замінити однією еквівалентною їм силою, яка дорівнює їх геометричній сумі та прикладена в тій же точці (рис. 8.2 і рис. 8.3). При цьому:
 . (8.2)
. (8.2)
Вектор  , який дорівнює геометричній сумі всіх сил довільної просторової системи сил, називається головним вектором цієї системи. Кажучи, що вектор є головним вектором даної системи сил, ми підкреслюємо, що він не може замінити дії на тіло системи сил, тобто не є еквівалентним цій системі сил.
, який дорівнює геометричній сумі всіх сил довільної просторової системи сил, називається головним вектором цієї системи. Кажучи, що вектор є головним вектором даної системи сил, ми підкреслюємо, що він не може замінити дії на тіло системи сил, тобто не є еквівалентним цій системі сил.
Щоб скласти всі одержані приєднані пари сил, необхідно геометрично скласти їх вектори-моменти. У результаті система пар заміниться однією парою, векторний момент якої дорівнює геометричній сумі векторів-моментів приєднаних пар (див. рис. 8.2 і рис. 8.3):
 (8.3)
(8.3)
Вектор  , який дорівнює геометричній сумі векторів-моментів усіх сил довільної просторової системи сил відносно центра зведення О, називається головним моментом цієї системи сил відносно того ж центра зведення О.
, який дорівнює геометричній сумі векторів-моментів усіх сил довільної просторової системи сил відносно центра зведення О, називається головним моментом цієї системи сил відносно того ж центра зведення О.
|
|
|
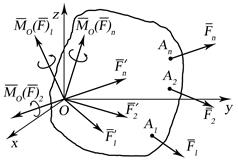

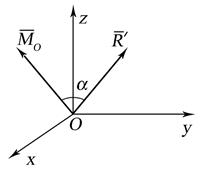
Отже, довільну просторову систему сил, яка діє на тверде тіло, у загальному випадку можна замінити однією силою, яка дорівнює головному вектору системи й прикладена в довільно вибраному центрі зведення О, та однією парою сил, векторний момент якої дорівнює головному вектору-моменту системи сил відносно центра зведення О (див. рис. 8.3).
 Вектори і можна знайти аналогічно. Дійсно, згідно з теоремою про проекції геометричної суми векторів на вісь, маємо
Вектори і можна знайти аналогічно. Дійсно, згідно з теоремою про проекції геометричної суми векторів на вісь, маємо

 (8.4)
(8.4)


звідси  (8.5)
(8.5)
 (8.6)
(8.6)
 (8.7)
(8.7)
 (8.8)
(8.8)
 (8.9)
(8.9)
При зміні центра зведення головний момент системи сил у загальному випадку змінюється. Залежність головного моменту просторової системи сил від вибору центра зведення виражається так: головний момент  просторової системи сил відносно нового центра А дорівнює векторній сумі головного моменту цієї системи сил відносно старого центра О та моменту відносно нового центра А сили , прикладеної в старому центрі О:
просторової системи сил відносно нового центра А дорівнює векторній сумі головного моменту цієї системи сил відносно старого центра О та моменту відносно нового центра А сили , прикладеної в старому центрі О:
 (8.10)
(8.10)
Статичними інваріантами просторової системи сил називаються такі характеристики цієї системи, які залишаються незмінними при зміні центра зведення. Статичних інваріантів два:
а) перший статичний інваріант – головний вектор системи сил . Величина та напрямок цього вектора не залежать від вибору центра зведення:
(8.11)



б) другий статичний інваріант – скалярний добуток головного вектора та головного моменту :
 (8.12)
(8.12)
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1439; Нарушение авторских прав?; Мы поможем в написании вашей работы!