КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведение двух параллельных сил
|
|
|
|
Приведение параллельных сил.
Изучение данных вопросов необходимо в дальнейшем для изучения динамики движении тел с учетом трения скольжения и трения качения, динамики движения центра масс механической системы, кинетических моментов, для решения задач в дисциплине «Сопротивление материалов».
Лекция 4. Центр тяжести.
В данной лекции рассматриваются следующие вопросы
1. Центр тяжести твердого тела.
2. Координаты центров тяжести неоднородных тел.
3. Координаты центров тяжести однородных тел.
4. Способы определения координат центров тяжести.
5. Центры тяжести некоторых однородных тел.
После того как было рассмотрено приведение к центру плоской системы и произвольной пространственной системы сил, мы опять возвращаемся к рассмотрению частного случая системы параллельных сил.
В ходе рассмотрения такой системы сил возможны три следующих случая приведения.
1. Система двух коллинеарных сил. Рассмотрим систему двух параллельных и направленных в одну сторону сил P и Q, приложенных в точках А и В. Будем считать, что силы перпендикулярны к этому отрезку (рис.1, а).
Выберем в качестве центра приведения точку С, принадлежащую отрезку АВ и удовлетворяющую условию:
АС / СВ = Q / P. (1)
Главный вектор системы RC = P + Q по модулю равен сумме этих сил: RC = P + Q.
Главный момент относительно центра С с учетом (1) равен нулю: MC = P ∙ АС - Q ∙ СВ = 0.
Таким образом, в результате приведения мы получили: RC ≠ 0, MC = 0. Это означает, что главный вектор эквивалентен равнодействующей, проходящей через центр приведения, то есть:
Равнодействующая коллинеарных сил равна по модулю их сумме, а ее линия действия делит отрезок, соединяющий точки их приложения, обратно пропорционально модулям этих сил внутренним образом.
|
|
|
Отметим, что положение точки С не изменится, если силы Р и Q повернуть на угол α. Точка С, обладающая таким свойством называется центром параллельных сил.
2. Система двух антиколлинеарных и не равных по модулю сил. Пусть силы P и Q, приложенные в точках А и В, параллельны, направлены в противоположные стороны и по модулю не равны (рис.1, б).
Выберем в качестве центра приведения точку С, удовлетворяющую по-прежнему соотношению (1) и лежащую на той же прямой, но за пределами отрезка АВ.
Главный вектор этой системы RC = P + Q по модулю теперь будет равен разности модулей векторов: RC = Q - P.
Главный момент относительно центра С по-прежнему равен нулю: MC = P ∙ АС - Q ∙ СВ = 0, поэтому
Равнодействующая антиколлинеарных и не равных по модулю сил равна их разности, направлена в сторону большей силы, а ее линия действия делит отрезок, соединяющий точки их приложения, обратно пропорционально модулям этих сил внешним образом.
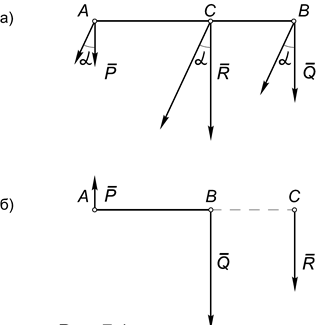
Рис.1
3. Система двух антиколлинеарных и равных по модулю сил. Возьмем за исходный предыдущий случай приведения. Зафиксируем силу Р, а силу Q устремим по модулю к силе Р.
Тогда при Q → Р в формуле (1) отношение АС / СВ → 1. Это означает, что АС → СВ, то есть расстояние АС →∞.
При этом модуль главного вектора RC → 0, а модуль главного момента не зависит от положения центра приведения и остается равным первоначальному значению:
MC = P ∙ АС - Q ∙ СВ = P ∙(АС - СВ) = P ∙ АB.
Итак, в пределе мы получили систему сил, для которой RC = 0, MC ≠0, а центр приведения удален в бесконечность, которую нельзя заменить равнодействующей. В этой системе нетрудно узнать пару сил, поэтому пара сил равнодействующей не имеет.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 432; Нарушение авторских прав?; Мы поможем в написании вашей работы!