КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Размещение лап на раме культиватора
|
|
|
|
Культиваторы для сплошной обработки почвы не должны оставлять пропусков, забиваться растительными остатками и грудить почву. Сгруживание почвы часто возникает по той причине, что каждая лапа образует впереди себя зону деформации почвы. Дальность зоны деформации почвы и ширина ее определяют параметры расстановки лап на раме орудия. Так, если дальность распространения зоны деформации окажется больше расстояния между рядами лап, то передний ряд лап будет работать не в тех условиях, что зданий. Это может привести к потере устойчивости хода культиватора и сгруживание почвы.
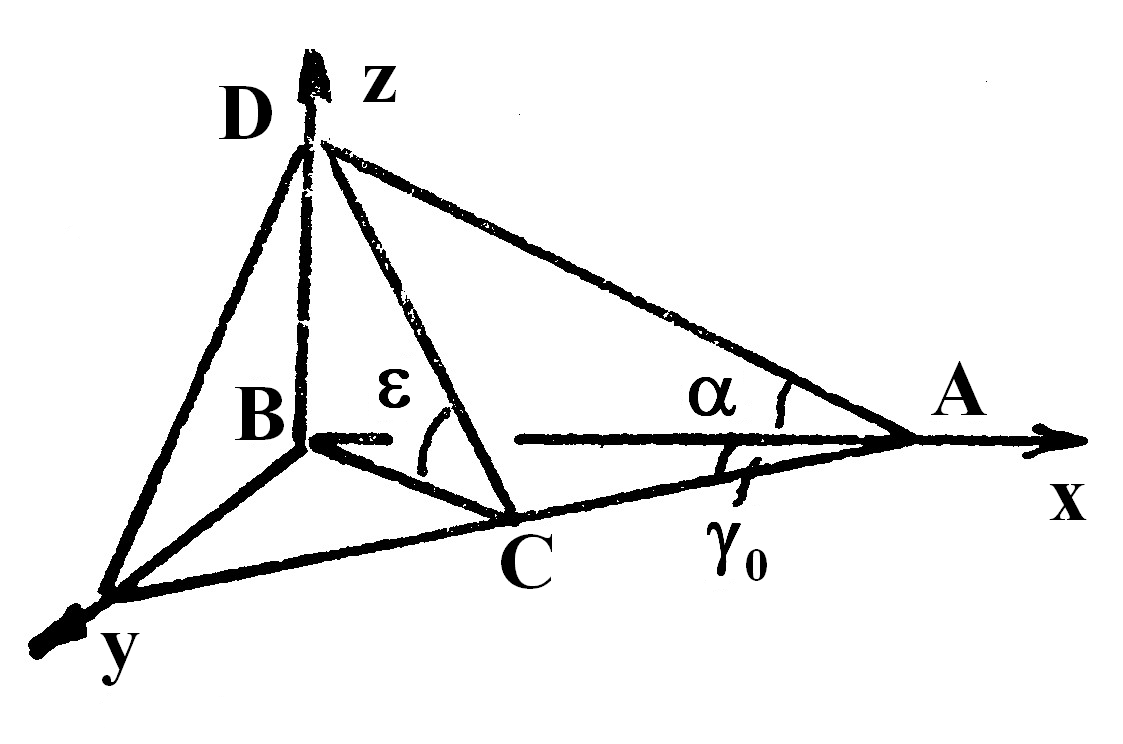
При движении лапы культиватора на глубине h на почву действует сила R, которая направлена под углом трения к нормали, проведенной к носку лапы (рис. 7.4). Разумеется, что направление деформации почвы может не совпадать с направлением усилия. Если допустить применимость к деформируемому пласту теории наибольших касательных напряжений, то опасные сечения образуют с направлением силы угол Q, симметричный относительно R. В сравнительно однородных средах разрушение обычно происходит по одному из направлений конуса. В почве же разрушение может происходить по обоим направлениям из-за большой неравномерности механических свойств [3,2]. Это дает некоторые основания считать, что в среднем скалывание почвы не отклоняется существенно от направления силы R, которая является осью симметрии по отношению к возможным и чередующимся направлениям деформации.
| 
|
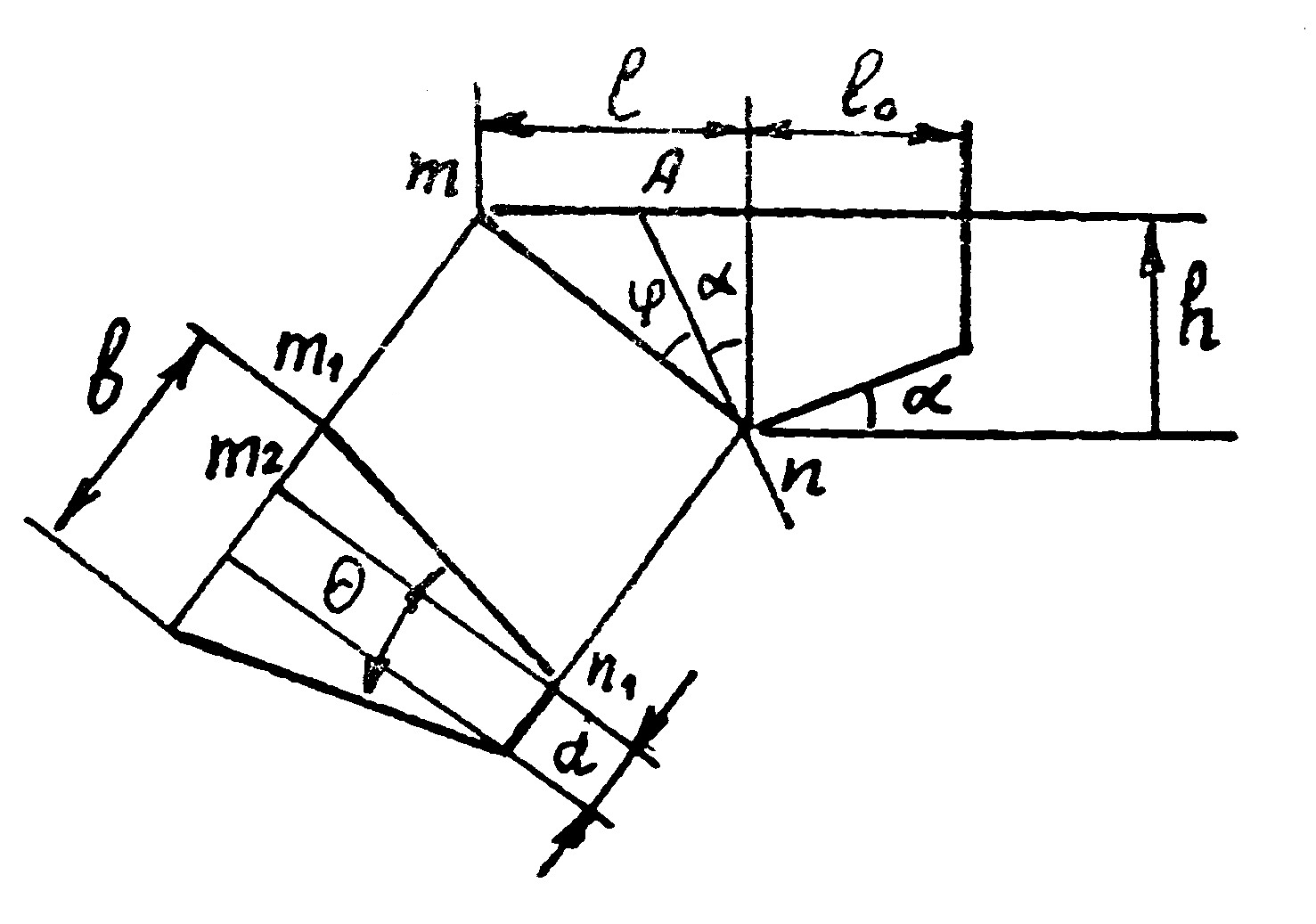
| Рис. 7.3. Схема к определению угла крошения почвы | Рис. 7.4. Зона деформации почвы перед лапой культиватора |
Зона распространения деформации в вертикально-продольной плоскости определится линией mn:
 .
.
С учетом вылета носка лапы относительно стойки l0 расстояние между рядами лап должно равняться:
 . (7.3)
. (7.3)
В поперечном направлении ширина полосы деформации определится так (рис.7.4):
 ,
,
причем
 ,
,
но
 ,
,
тогда
 . (7.4)
. (7.4)
Угол Q обычно составляет 40...50°.
Если задаться реальными условиями и определить расстояние между рядами лап по уравнению 7.3, то окажется, что оно составит для наиболее распространенных лап 500...600 мм.
С недостатком данной методики определения параметров расстановки лап прежде всего столкнулись при создании скоростных культиваторов. При скорости 12...15 км/ч резко возрастало тяговое сопротивление культиватора, а в зоне действия лап образовывался сплошной почвенный вал. Наблюдения за работой культиватора показали, что причиной этого является несоответствие схемы расстановки лап новому скоростному режиму. При высокой скорости почва после схода с лапы движется как тело, брошенное под углом к горизонту. Если почва, подброшенная первым рядом лап, не успеет опуститься на место к моменту подхода следующего ряда, то возможен встречный удар и, как следствие, увеличение тягового сопротивления и сгруживание (рис. 7.5) [4].
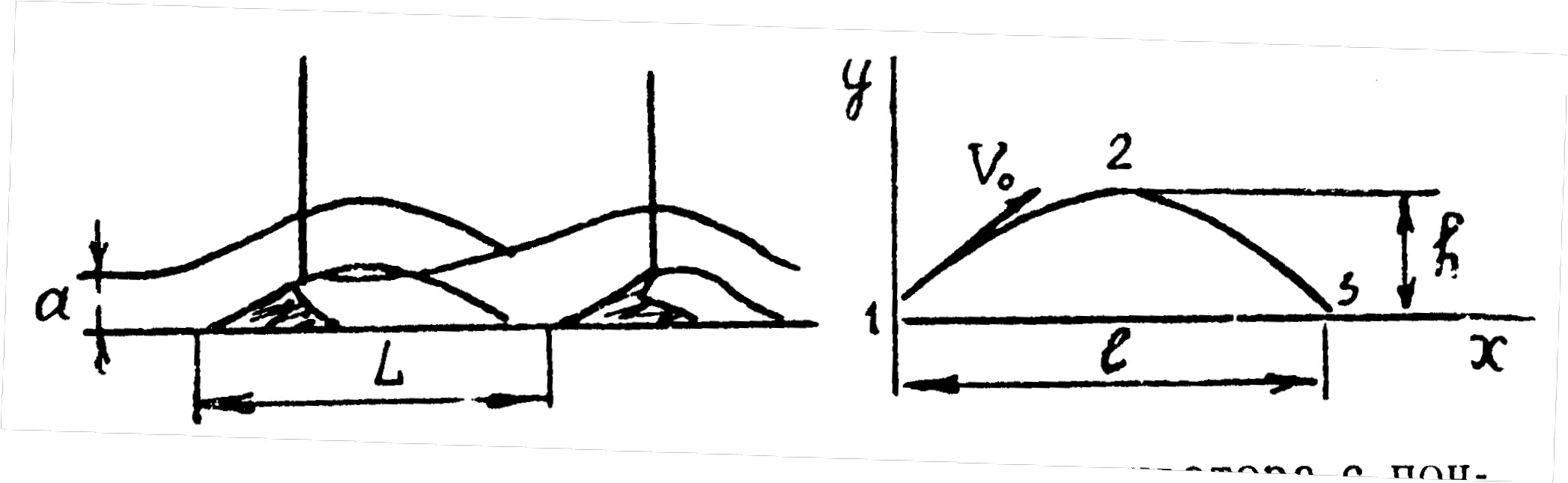
Рис. 7.5. Схема взаимодействия лап культиватора с почвой при высокой скорости агрегата
Если рассмотреть влияние скорости в первом приближении, т.е. без учета сил трения по металлу и сопротивления воздуха, то движение почвы можно описать уравнениями
 .
.
Наиболее характерными параметрами траектории являются высота h точки 2 и дальность полета l для точки 3 (см. рис. 7.5).
Для точки 2 характерно, что Vy2=0, тогда
 ;
;
 .
.
Итак,
 . (7.5)
. (7.5)
Координата х2 может быть найдена аналогично:
 .
.
Если учесть симметричность параболы, то
 ,
,
или
 . (7.6)
. (7.6)
Начальную скорость почвенных частиц V0 часто отождествляют со скоростью движения агрегата. В действительности она будет несколько ниже скорости агрегата, так как почва при движении по лапе затормозится за счет сил трения. Чтобы учесть влияние трения на скорость движения почвы по лапе, необходимо рассмотреть силы, действующие на элементы массы m, расположенной на наклонной поверхности под углом α к горизонту (рис. 7.6).

| Рис. 7.6. Схема сил, действующих на почву, движущуюся по поверхности лапы культиватора |
Дифференциальное уравнение движения почвы может быть составлено с учетом принципа Д,Аламбера:
 ;
;
где f = tgφ - коэффициент трения почвы о лапу;
φ - угол трения почвы о лапу.
Уравнение может быть решено путем разделения переменных и последовательного понижения порядка
 ;
;
 ;
;
 ; (7.7)
; (7.7)
 . (7.8)
. (7.8)
Если учесть, что путь S2, пройденный почвой по лапе, зависит от ширины лапы S, то после подстановки этого значения в уравнение (7.8) можно найти время t движения частиц по поверхности лапы:
 . (7.9)
. (7.9)
Вообще говоря, перед знаком радикала в числителе при решении квадратного уравнения необходимо было поставить знаки "плюс-минус", и тогда могли быть определены два решения квадратного уравнения (7.8). Анализ корней показал, что при знаке "плюс" получится нереальное решение, которое могло бы иметь физический смысл лишь при бесконечной длине наклонной плоскости, когда частица, движущаяся за счет инерции, остановилась бы при подъеме вверх и скатилась вниз до отметки S от начала клина.
Например, для V=2 м/с; α=15°; φ=25°; S=5 см, получено t1=0,026 с, t2=0,55 с, а при движении без учета трения t=0,025 с. В связи с этим в дальнейшем используется только одно решение квадратного уравнения, определяемого по формуле (7.9).
Длина пути скольжения почвы по лапе S2 должна быть измерена вдоль направления движения почвы, так что S2 будет отличаться от ширины лапы S, которая измеряется в направлении, перпендикулярном к лезвию. Если учесть, что движение почвы совпадает с направлением оси х, то S2 может быть определена на основании простых геометрических преобразований (рис. 7.7).
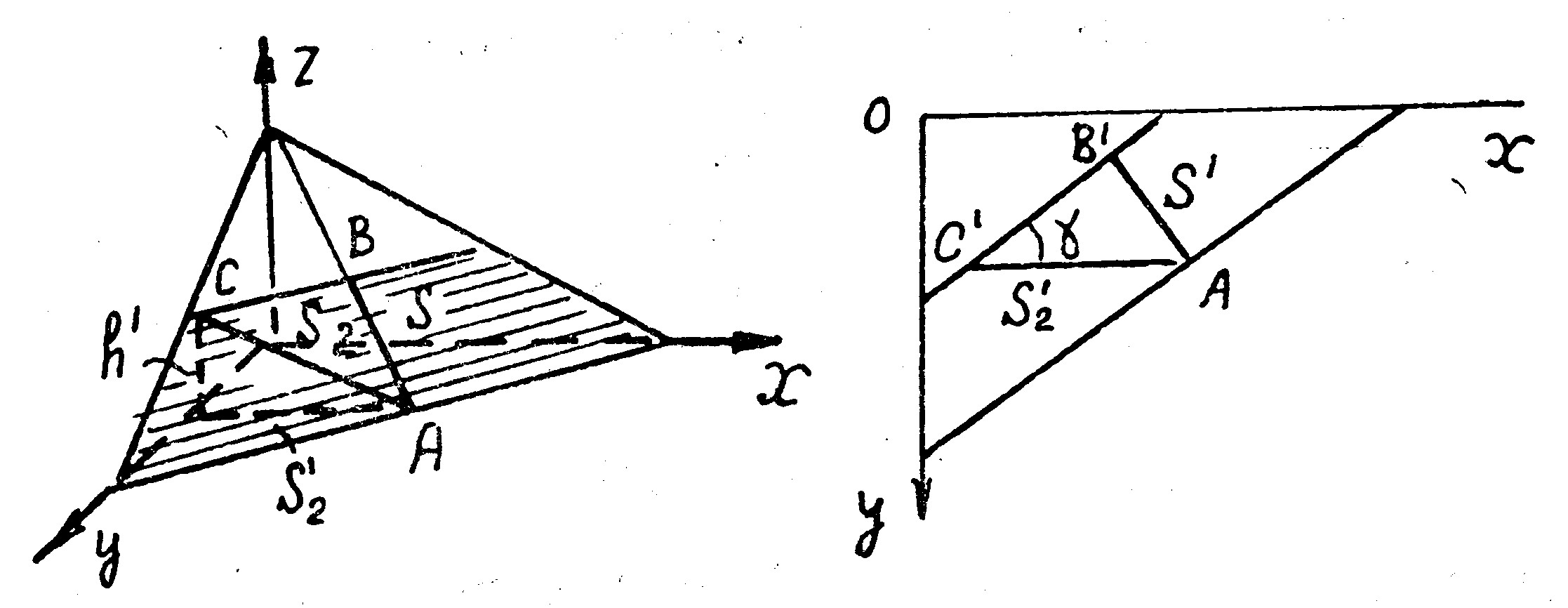
Рис. 7.7. Длина пути скольжения почвы по лапе
По теореме Пифагора
 ,
,
где  - проекции пути скольжения почвы на горизонталь;
- проекции пути скольжения почвы на горизонталь;
 - высота задней кромки крыла.
- высота задней кромки крыла.
Из Δ 

 ;
;  .
.
В свою очередь,
 ,
,
тогда
 .
.
Если дополнительно учесть, что
 ,
,
то
 . (7.10)
. (7.10)
После подстановки найденного по формуле (7.9) времени t в уравнение (7.7), можно найти уточненное значение скорости почвы, сошедшей с крыла лапы. Используя эту величину в уравнениях (7.5) и (7.6) вместо V0, можно определить высоту подбрасывания почвы и дальность полета частиц после схода с крыла.
Вычислительный эксперимент, проведенный с использованием компьютерной программой "Лапа", разработанной по модели изложенной выше, показал, что для работы культиватора на скорости до 15 км/ч, необходимо расстояния между рядами лап установить не менее 700 мм, а угол постановки крыла универсальной лапы к горизонту уменьшить до 23...24°.
Контрольные вопросы
1. Какие рабочие органы могут быть использованы на современных культиваторах?
2. Чем обуславливает угол раствора 2γ лезвий стрельчатых лап культиваторах.
3. Как правильно заточить лапы культиваторов.
4. Как определить параметры зоны деформации почвы перед лапой культиватора?
5. Почему у скоростных культиваторов приходится увеличивать расстояния между рядами лап.
6. Почему у скоростных культиваторов приходится увеличивать расстояния между рядами лап.
Литература
1. Синеоков Г.Н., Панов И.М. Теория и расчет почвообрабатывающих машин. М.: Машиностроении, 1977.
2. Кленин Н.И. и др. Сельскохозяйственные машины. М.: Колос, 2008 - 816 с.
3. Кошурников А.Ф. и др. Анализ технологических процессов, выполняемых сельскохозяйственными машинами, с помощью ЭВМ. Пермь, 1995, - 272 с.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 5940; Нарушение авторских прав?; Мы поможем в написании вашей работы!