КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Характеристики синхронных электродвигателей
|
|
|
|
Схема включения синхронной машины приведена на рис.2.19. Отличительной особенностью синхронного электродвигателя является то, что на рабочем участке его скорость не зависит от нагрузки и определяется как
w = 2p f / р, (2.67)
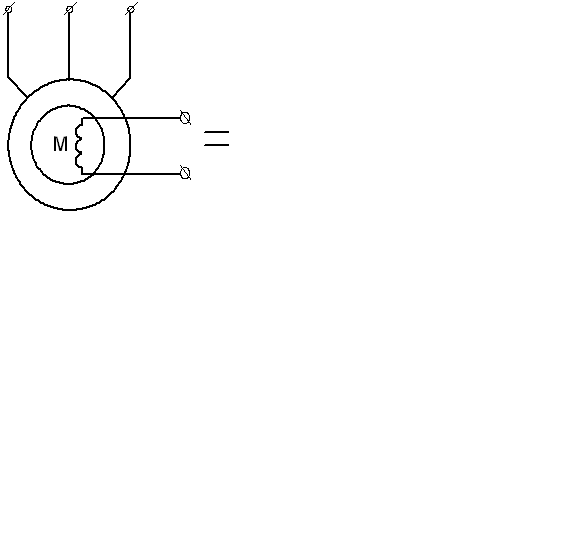
Рис.2.19. Схема включения синхронной машины
где р – число пар полюсов;
f – частота напряжения питания.
Поэтому его механическая характеристика представляет из себя прямую линию, параллельную оси абсцисс (рис.2.20), то есть жесткость ее равна бесконечности. Однако мгновенные значения скорости синхронного двигателя могут отличаться от скорости идеального холостого хода в результате отставания ротора от поля статора, например, при набросе или сбросе нагрузки на валу.
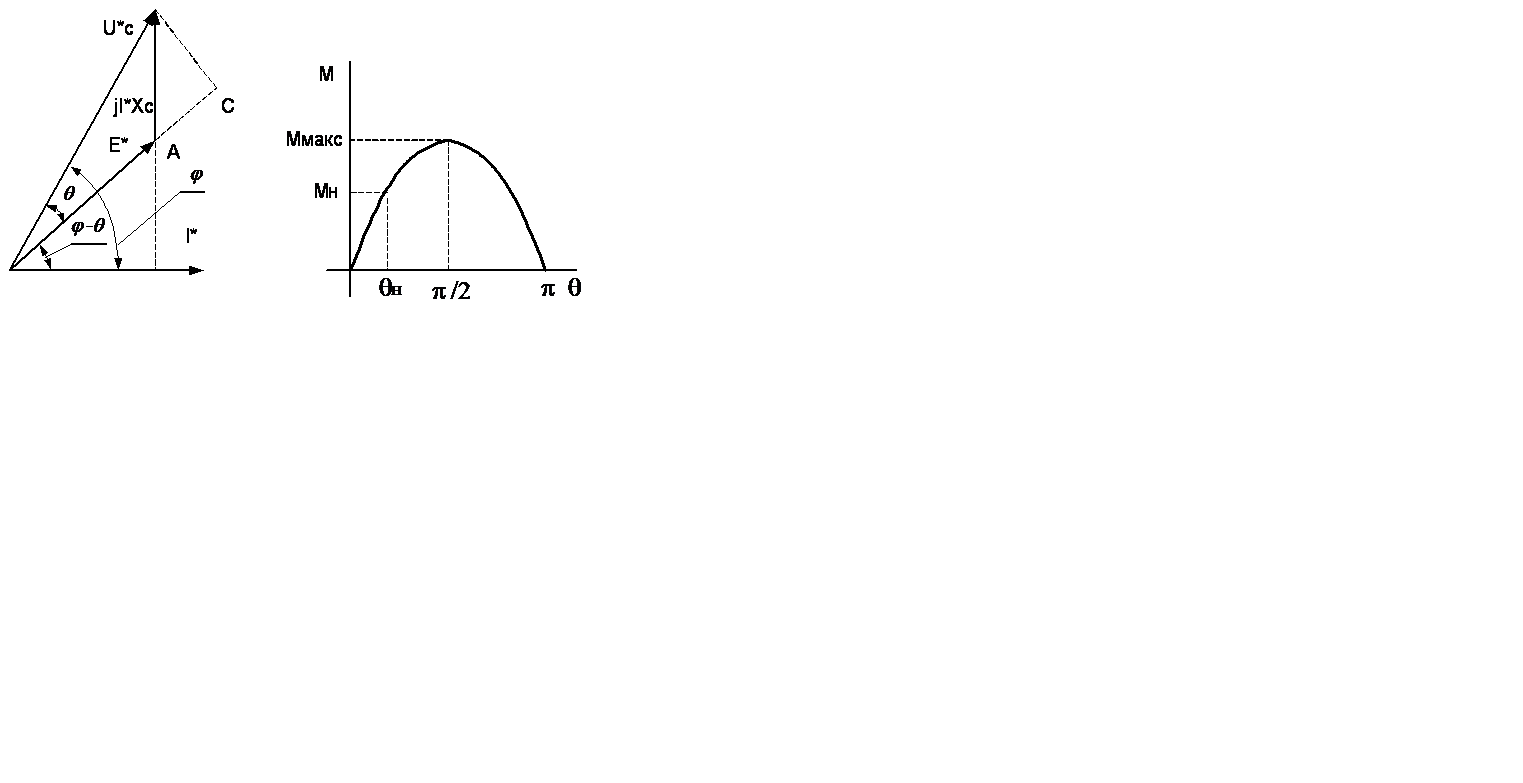
Значительно больший интерес представляет собой угловая характеристика синхронной машины – это зависимость ее момента от угла q сдвига фаз между ЭДС двигателя и напряжением сети: М = f (q), которая определяется из упрощенной векторной диаграммы, приведенной на рис.2.21.а, где

Рис.2.20. Механическая характеристика синхронной машины
I* - вектор фазного тока статора;
E*, U*c – векторы фазных ЭДС и напряжения статора соответственно;
Хс – индуктивное сопротивление фазы статора;
j - угол сдвига между током и напряжением статора;
q - угол сдвига между напряжением и ЭДС статора.
При построении диаграммы считается, что машина является неявнополюсной и активное сопротивление статора примерно равно нулю, то есть активная мощность, потребляемая из сети, полностью передается на ротор двигателя, следовательно
Рс= 3 Uс I cosj.
М = Рс / w о = 3 Uc I cosj / w о. (2.68)
Из рис. 2.21а следует
Uс cosj = Е cos(j -q),
а из треугольника АВС получаем
|
|
|
cos(j -q) = Uc sin q / I Хс.
Следовательно
Uс cosj = Е Uc sin q / I Хс.
Подставим это выражение в (2.68) и получим
М = 3Е Uc sin q / / w о Хс = Мм sin q. (2.69)
Уравнение (2.69) описывает зависимость момента синхронной машины от угла q, график ее приведен на рис.2.21 б.
Здесь максимум момента имеет место при q = p /2. Величина этого момента характеризует перегрузочную способность синхронной машины. Обычно l = Ммакс / Мн = 2 – 3.
Зона при q > p /2 является зоной неустойчивой работы синхронного двигателя, когда он может выпасть из синхронизма. Номинальный угол q составляет 25 – 30 °.
Если синхронная машина имеет явно выраженные полюса, то к моменту, определенному (2.69), добавляется реактивная составляющая и тогда общий момент определяется как
М = 3/ w о[Uc E sinq / Х d + Uс2/2 (1/Х d – 1 / Хq) sin 2q ], (2.70)
где Х d, Хq – индуктивные сопротивления по продольной и поперечной осям соответственно.
а) б)
Рис.2.21. Векторная диаграмма и угловая характеристика синхронной
машины
Зависимости тока синхронной машины от ее тока возбуждения, приведенные на рис.2.22, называются V - образными характеристиками.
Кривая cosj = 1 является регулировочной характеристикой электродвигателя; Р1, Р2, Р3 – значения нагрузки. Слева от кривой cosj = 1 - двигатель недовозбужден и потребляет из сети индуктивную энергию; справа – перевозбужден и генерирует в сеть индуктивную энергию.
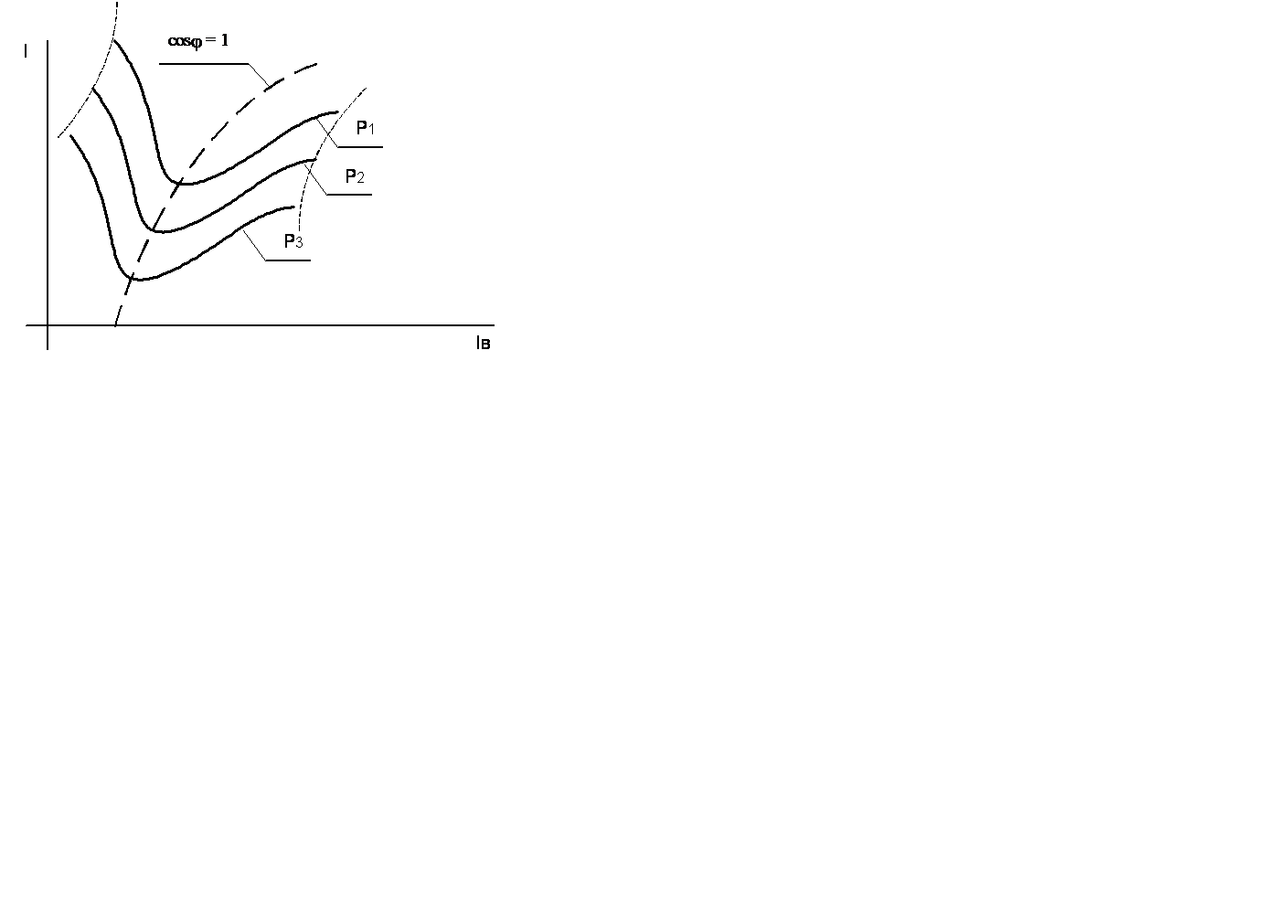
Р1 > Р2 > Р3
Рис.2.22. V – образные характеристики синхронной машины
Слева V – образные кривые ограничиваются условиями устойчивой синхронной работы, а справа – условиями нагрева машины.
Пуск синхронной машины может осуществляться с помощью вспомогательного двигателя, когда последний раскручивает его до скорости идеального холостого хода или с помощью специальной пусковой обмотки (асинхронный пуск). Наиболее распространен асинхронный пуск. Для этого на роторе синхронной машины располагается специальная короткозамкнутая пусковая обмотка, и машина пускается как асинхронная. Для защиты от перенапряжений обмотка возбуждения замыкается на разрядное сопротивление. По условиям нагрева короткозамкнутые обмотки не могут работать в продолжительном режиме и время их работы не должно превышать 20 – 30 секунд.
|
|
|
Торможение синхронных машин осуществляется в режиме рекуперации или динамического торможения. Для осуществления динамического торможения в обмотку статора включаются добавочные сопротивления, а в цепь ротора подается ток возбуждения (рис.2.23). Механические характеристики при этом имеют такой же вид, как и у асинхронных машин в режиме динамического торможения.
Синхронные электродвигатели занимают в промышленности значительное место, так как с учетом их компенсационной способности имеют высокие энергетические показатели и сравнительно низкую стоимость.
Важной особенностью синхронных машин является то, что они менее чувствительны к колебаниям напряжения сети, чем асинхронные, так как их максимальный момент пропорционален напряжению сети в отличие от
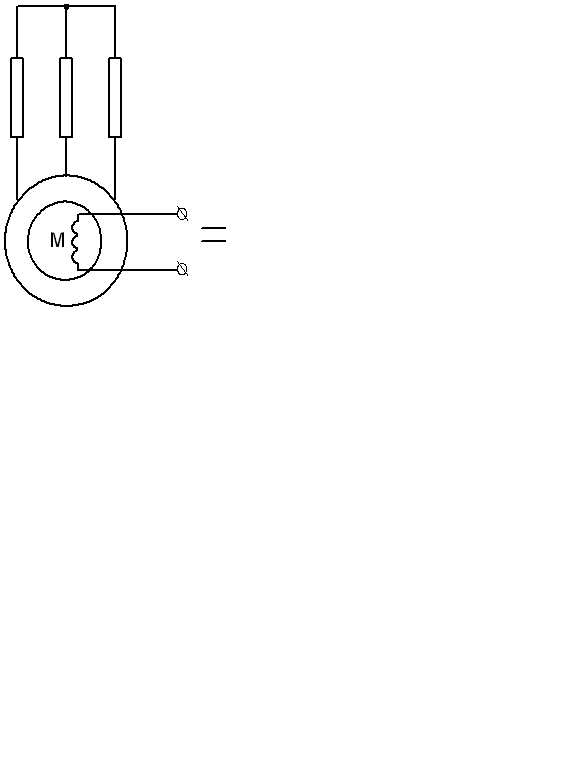
Рис.2.23. Схема динамического торможения
синхронной машины
асинхронных машин, чей момент пропорционален квадрату напряжения.
Кроме того, перегрузочная способность синхронного двигателя может быть увеличена, в том числе и автоматически, за счет увеличения тока возбуждения, например, при резком возрастании нагрузки на валу.
Технико – экономический анализ [9] показывает, что стоимости асинхронных и синхронных машин средней мощности примерно равны, но при увеличении мощности синхронные двигатели становятся дешевле асинхронных, что связано с удорожанием изготовления роторов последних. Однако с учетом производства реактивной энергии синхронные двигатели, с мощностями даже ниже 100 кВт, оказываются дешевле, чем аналогичные асинхронные с компенсационными устройствами. В России синхронные машины мощностью до 1000 кВт выпускаются ОАО «СЭЗ» (г. Сафоново), мощностью до 31500 кВт – АО «Привод» (г. Лысьва).
В настоящее время, в связи с появлением и широким распространением преобразователей частоты появилась возможность регулирования скорости синхронных машин.
|
|
|
В нефтегазодобывающей промышленности синхронные машины применяются для привода пасосов и компрессоров в системах перекачки нефти и поддержания пластового давления.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1065; Нарушение авторских прав?; Мы поможем в написании вашей работы!