КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типы уравновешивающих механизмов
Уравновешивающие механизмы толкающего типа. Схема уравновешивания качающейся части механизмом толкающего типа приведена на рис. 3.63.
Уравновешивающий механизм шарнирно соединен одним концом (точка А) с люлькой, а другим (точка В) - с верхним станком. В результате действия силы упругого тела Р на плече h относительно оси цапф появляется момент М у = Ph, направленный навстречу моменту силы тяжести. При повороте качающейся части центр А перемещается по дуге окружности радиуса г с центром в точке О (ось цапф). В результате меняется плечо h и расстояние между шарнирными опорами механизма АО, от которого зависит величина Р.
Рассмотрим конструкции основных типов механизмов.
Пружинный уравновешивающий механизм толкающего типа (рис. 3.64) представляет собой колонку, в которой между внутренним цилиндром (штоком) и наружным цилиндром размещена цилиндрическая винтовая пружина круглого или прямоугольного поперечного сечения. Внутренний цилиндр опирается на сферический подпятник, расположенный на верхнем станке, а наружный цилиндр - шарнирно соединяется с люлькой. Надо иметь в виду, что расстояние между неподвижным и подвижным шарнирами может быть меньше высоты пружины, что видно на рис. 3.64. Пружина часто состоит из нескольких секций. Соседние секции имеют разное направление витков и разделены промежуточными шайбами. Это упрощает изготовление пружины, способствует обеспечению продольной устойчивости и уменьшает закручивание от моментов трения, появляющихся на опорных торцевых поверхностях. Поперечное перемещение витков пружины ограничивается цилиндром или штоком.
-
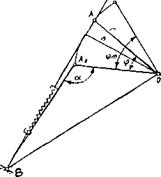
Рис. 3.63. Схема уравновешивания механизмом толкающего типа
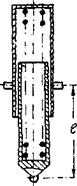
Рис. 3.64. Схема пружинного уравновешивающего механизма толкающего типа
Если момент от силы уравновешивающего механизма действует не только в плоскости стрельбы, то возникают моменты от силы уравновешивающего механизма, разворачивающие качающуюся часть в плоскости оси цапф люльки. В связи с этим, а также для удобства компоновки обычно на орудии устанавливают две колонки, расположенные симметрично по отношению к плоскости стрельбы.
Заметим, что механизмы толкающего типа не обеспечивают полного уравновешивания в заданном диапазоне углов возвышения. Для достижения наиболее высокой точности уравновешивания и максимального сокращения массы пружины необходимо механизм расположить так на орудии, чтобы его неподвижный шарнир В (рис. 3.63) находился на линии, проходящей через точки А0 и А„„ которые соответствуют положениям подвижного шарнира при нулевом и наибольшем углах возвышения. Выполнение указанного условия позволяет добиться полного уравновешивания в трех точках - на границах диапазона углов возвышения и при некотором промежуточном значении угла  (рис. 3.62, е).
(рис. 3.62, е).
Пневматический уравновешивающий механизм толкающего типа приведен на рис. 3.65. Как и пружинный механизм, он имеет вид колонки, концы которой шарнирно связаны с верхним станком и люлькой. Между цилиндром 1 и поршнем 2 находится сжатый воздух или азот. Для уменьшения размеров механизма поршень делается пустотелым с учетом определенного объема газа, установленного расчетным путем. При повороте качающейся части происходит политропическое изменение состояния газа в колонке. В месте подвижного сочленения поршня и цилиндра размещается уплотняющее устройство 3. Во избежание утечек газа из колонки доступ его к уплотняющему устройству перекрывается жидкостью (стеолом или веретенным маслом), заливаемой в цилиндр. Для наполнения колонки жидкостью и газом предусматривается вентильное устройство 4. Объем и давление газа устанавливаются из расчета полного уравновешивания качающейся части в трех точках (рис. 3.62, е), как и для пружинного механизма.
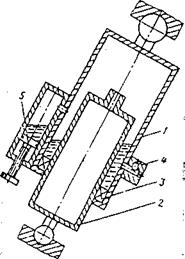
Рис.3.65.Схема пневматического уравновешивающего механизма толкающего типа.
Теоретически достижимая точность пружинного и пневматического уравновешивающих механизмов толкающего типа примерно одинакова. Пневматические механизмы легче и компактнее пружинных. Однако им присущи следующие недостатки:
давление газа в колонке зависит от температуры окружающей среды, что отрицательно влияет на точность уравновешивания и обусловливает необходимость частой регулировки механизма;
в уплотняющих устройствах действуют сравнительно большие силы трения, которые не могут быть уравновешены при повороте качающейся части в разных направлениях и потому нагружают привод вертикальной наводки;
пневматические механизмы менее надежны в эксплуатации; с помощью пневматического механизма можно добиться высокой точности уравновешивания в сравнительно малом интервале заданного диапазона углов возвышения, но тогда в остальном интервале (интервалах) неуравновешенность окажется слишком большой.
Пневмопружинные механизмы имеют более сложную конструкцию по сравнению с пружинными и пневматическими механизмами. По конструкции они представляют собой пневматические
механизмы, в которые введены одна или две пружины, вступающие в работу при тех углах возвышения, при которых неуравновешенность наиболее велика. Здесь наличие пружин уменьшает неуравновешенность. В большинстве случаев удовлетворительный результат достигается с помощью одной контрпружины, которая сжимается только в интервале больших углов возвышения. Контрпружина размещается в Цилиндре (рис. 3.66, а) или полом штоке (рис. 3.66, б). Соответствующими конструктивными решениями можно обеспечить работу одной и той же пружины в начале и в конце диапазона углов возвышения (рис. 3.66, в). При помощи пружины сначала увеличивается усилие, создаваемое газом, а потом уменьшается. Для лучшей корректировки диаграммы изменения усилия пневматического механизма  иногда приходится ставить две пружины (рис. 3.66, г). В интервале небольших углов возвышения действует в основном пружина малой жесткости 2, тогда как пружина большой жесткости 1 почти не работает. В среднем интервале диапазона углов возвышения пружины выключаются, а затем частично компенсируют действие сжатого газа.
иногда приходится ставить две пружины (рис. 3.66, г). В интервале небольших углов возвышения действует в основном пружина малой жесткости 2, тогда как пружина большой жесткости 1 почти не работает. В среднем интервале диапазона углов возвышения пружины выключаются, а затем частично компенсируют действие сжатого газа.
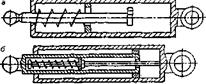

Рис. 3.66. Схемы пневмопружинных уравновешивающих механизмов
Типы уравновешивающих механизмов современных артиллерийских орудий приведены в табл. 3.3.
Уравновешивающие механизмы толкающего типа не позволяют добиться полной компенсации момента веса качающейся части на всех углах возвышения. Этот недостаток проявляется тем сильнее, чем шире диапазон углов возвышения и больше моменты силы тяжести. Кроме того, при уравновешивании значительных по величине моментов веса качающейся части возникают трудности размещения таких механизмов на орудии.
Уравновешивающие механизмы тянущего типа воздействуют на задний конец люльки при помощи тягового звена (штока, цепи или троса). Обычно такие механизмы используют для зенитных и тяжелых орудий.
Наибольшее распространение получили пружинные механизмы, позволяющие добиться теоретически полного уравновешивания во всем диапазоне углов поворота качающейся части. Колонка с цилиндрической винтовой пружиной размещается на верхнем станке неподвижно или таким образом, что имеет возможность качаться в вертикальной плоскости.
Схема уравновешивания механизмом тянущего типа с качающейся колонкой, совмещенная в одной вертикальной плоскости, изображена на рис. 3.67.
Данная схема допускает возможность полного уравновешивания качающейся части при всех углах возвышения, если в качестве упругого тела механизма используется пружина.
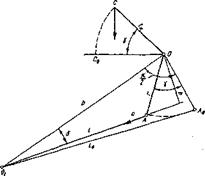
Рис. 3.67. Схема уравновешивания механизмом тянущего типа с качающейся колонкой
Таблица 3.3
| Орудие | Калибр, мм | Тип | Кол-во механизмов на орудии | Максимальное усилие, кг | Рабочий ход, мм | Начальное давление, КГ/СМ2 | Масса, кг | Расположение механизма |
| МТ-12 | Пружинный тянущего типа | - | - | 93,14 | Выше оси цапф на 230 мм, слева от оси ствола на 220 мм | |||
| ДТ-74 | Пневмопружинный толкающего типа | 86,5 | 60,6 | Симметрично относительно ствола | ||||
| ДТ-30 | Пневопружинный толкающего типа | 34,3 | Справа относительно ствола | |||||
| М-46 | Пневматический толкающего типа | Симметрично относительно ствола | ||||||
| 2А36 | Пневматический толкающего типа | 9570,8 | 126,5 | Симметрично относительно ствола | ||||
| 2А31 | Пневмопружинный толкающего типа с компенсатором | 25,5 | Ниже оси канала ствола, впереди оси цапф | |||||
| 2СЗМ | Пневмопружинный толкающего типа | Справа от ствола, сзади оси цапф | ||||||
| 2А37 | Пневматический толкающего типа | 6380,4 | Симметрично относительно ствола | |||||
| 2А44 | Пневмопружинный толкающего типа | 68,5 | Симметрично относительно ствола |
Требуемое равенство момента силы веса качающейся части и момента, создаваемого уравновешивающим механизмом (при принятых на рис. 3.67 обозначениях), можно записать в виде условия:
 . (3.36)
. (3.36)
Можно показать, что это условие будет выполняться при всех углах у, если
 - жесткость пружины;
- жесткость пружины;
l - текущая стрела сжатия пружины;
при  = 0 линия ОА0 перпендикулярна линии ОО1.
= 0 линия ОА0 перпендикулярна линии ОО1.
При этом следует иметь в виду, что суммарные силы трения во всех подвижных соединениях будут нарушать равенство (3.36).
Пружинный механизм тянущего типа с качающейся колонкой представлен на рис. 3.68. Цилиндрические цапфы 2 колонки 1 шарнирно сочленяются с кронштейном 3 верхнего станка. Сжатая пружина 4 упирается одним торцом в головку штока 5, другим - в дно 6. Шток 7 шарнирно связан с люлькой орудия.
Недостатком механизмов с качающейся колонкой является то, что при проектировании орудия требуется предусмотреть свободное пространство для беспрепятственного поворота колонки. Кроме того, наличие момента от силы тяжести самого механизма относительно оси цапф люльки отрицательно сказывается на точности уравновешивания качающейся части.
При тяжелых уравновешивающих механизмах, которые к тому же имеют и большие размеры, колонка крепится неподвижно на верхнем станке (рис. 3.69). При этом усилие пружины передается качающейся части чаще всего через цепь 1, огибающую направляющий блок 2. Для уравновешивания больших моментов веса качающейся части используются мощные пружины, обладающие большой жесткостью при значительной рабочей стреле сжатия. При этом пружины состоят из нескольких секций, которые размещаются в двух -трех параллельных рядах.
С целью уменьшения размеров и массы колонки применяют пневматические механизмы тянущего типа. Однако в этом случае возникают трудности обеспечения приемлемой точности компенсации момента веса качающейся части. Устройство колонки пневматического механизма тянущего типа принципиально такое же, как пневматического накатника.
Хорошего уравновешивания удается достигнуть при помощи кулачка, который охватывается гибкой связью (рис. 3.70). Профиль
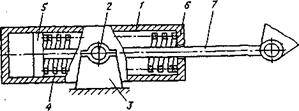
Рис. 3.68. Пружинный уравновешивающий механизм тянущего типа с качающейся колонкой
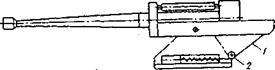
Рис. 3.69. Схема уравновешивающегося механизма тянущего типа с неподвижной колонкой
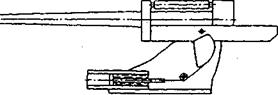
Рис. 3.70. Схема уравновешивания при помощи кулачка
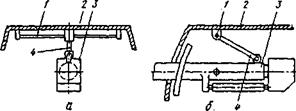
Рис. 3.71. Схема уравновешивания торсионным механизмом: а - вид сзади; б - вид сбоку
кулачка выбирается так, чтобы при повороте качающейся части усилие механизма и плечо его действия относительно оси цапф менялись бы в соответствии с величиной момента веса.
Торсионные уравновешивающие механизмы. До настоящего времени торсионные уравновешивающие механизмы, в которых упругим телом является торсион, не находят широкого применения. Связано это с тем, что момент при закручивании торсиона пропорционален углу поворота, а момент силы тяжести качающейся части - косинусу угла. Кроме того, торсионные валики имеют большую длину и допускают сравнительно небольшие углы закручивания. Поэтому в большинстве случаев требуется введение промежуточных передач от торсионного валика к качающейся части, что усложняет механизм и снижает его КПД. Имеются варианты размещения торсионов вдоль люльки и в полом коренном вале механизма вертикальной наводки.
Весьма удачно решен вопрос об уравновешивании качающейся части торсионным механизмом применительно к танковым установкам, которые имеют небольшие углы возвышения. Торсионные валики размещаются на крыше 2 башни (рис. 3.71). Момент от закрученных валиков передается качающейся части 3 через рычаг 4 с роликом. Силы трения на оси ролика можно свести к минимуму введением подшипников качения. Схема довольно проста и при небольшом диапазоне углов возвышения обеспечивает требуемое уравновешивание.
При небольших весовых моментах и ограниченных габаритах может применяться торсионный механизм с редуктором (рис. 3.72). Однако применение редуктора снижает общий КПД механизма, а при больших моментах резко увеличиваются усилия на зуб шестерни. Для обеспечения уравновешивания могут применяться торсионные механизмы с копиром (рис. 3.73). Подбирая профиль копира можно добиться полного уравновешивания на всех углах возвышения.
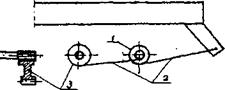
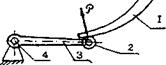
Рис. 3.72. Схема торсионного механизма Рис. 3.73. Схема торсионного механизма с редуктором:
1 - редуктор; 2 - гибкая связь; 3 - шкив / - копир; 2 - ролик; 3 - рычаг; 4 - торсион
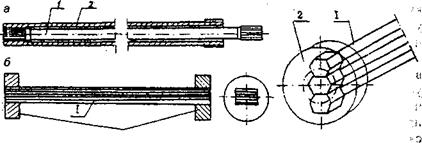
Рис. 3.74. Схемы уменьшения длины торсиона:
а - телескопический торсион:1 - торсион; 2 - труба торсиона;
б - пластинчатый торсион:1/ - пластины; 2 - обоймы
Торсион, как упругий элемент, может применяться не только для уравновешивания качающейся части, но часто применяется также для уравновешивания отдельных частей артсистем, например, различных крышек, створок, откидных домкратов и др. Если расчетная длина торсиона превышает допустимую по конструктивным соображениям, то длина механизма может быть уменьшена одним из следующих способов: применением телескопического торсиона (рис. 3.74, а); применением пучкового или пластинчатого торсиона (рис. 3.74, б).
|
|
Дата добавления: 2015-07-02; Просмотров: 5126; Нарушение авторских прав?; Мы поможем в написании вашей работы!