КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Коррекция системы автоматического управления
|
|
|
|
Динамические показатели качества в значительной мере определяются инерционными свойствами звеньев САУ. К таким звеньям в рассматриваемом примере относятся ЭМУ, Г и Д, передаточные функции которых имеют довольно существенные значения основных постоянных времени.
Точность работы САУ также зависит от возмущающих воздействий, действующих на объект управления и силовые преобразователи. К таковым в рассматриваемом следящем электроприводе можно отнести колебания напряжения промышленной сети, вследствие чего изменяется скорость приводных двигателей, и изменения моментов сопротивления на валу двигателя.
Для уменьшения влияния инерционности и возмущений в САУ вводят местные обратные связи. Для расчета этих дополнительных контуров управления целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат.
В используемой в качестве примера САУ можно ввести два внутренних вложенных друг в друга контура регулирования: один по напряжению генератора, второй по скорости электродвигателя. Организация этих обратных связей представлена на рис. 7.1.
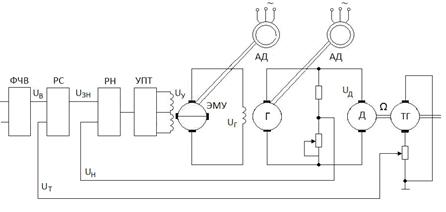
Рис. 7.1. Реализация подчиненного регулирования
В данной схеме регулятор напряжения РН и регулятор скорости РС помещены между ФЧВ и УПТ, т.к. коррекцию удобнее реализовать на постоянном токе в слаботочной части прямого канала управления.
Здесь датчиком внутреннего контура является делитель напряжения, с которого часть напряжения  подается на вычитающий вход РН. В качестве датчика скорости используется тахогенератор ТГ (со своим делителем напряжения), напряжение с которого поступает на вычитающий вход РС. Далее рассматривается методика последовательной коррекции с подчиненным регулированием координат для синтеза РН и РС.
подается на вычитающий вход РН. В качестве датчика скорости используется тахогенератор ТГ (со своим делителем напряжения), напряжение с которого поступает на вычитающий вход РС. Далее рассматривается методика последовательной коррекции с подчиненным регулированием координат для синтеза РН и РС.
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 321; Нарушение авторских прав?; Мы поможем в написании вашей работы!